基于Solidworks的计算机辅助设计规范化研究
2022-08-28 07:44张超徐妍张卫
现代信息科技 2022年10期
张超,徐妍,张卫
(北京科技大学天津学院 智能制造学院,天津 301830)
0 引 言
传统的机械设计过程涵盖机械制图,机械原理,材料力学和机械设计等多门学科,独立完成整个项目设计,需要较高的知识储备和丰富的设计经验,对于没有实际设计经验的在校本科生难度较大。随着计算机硬件性能的提升,为计算机辅助机械设计提供了物质基础,同时SolidWorks,Pro-E等辅助设计软件的发展,从以往专注于模型建立,装配功能,和运动学仿真等较为单一的功能,到现今嵌入多种功能模块,满足多元设计需求,如目前的Solidworks 可实现固体零件有限元分析,流程分析,计算机辅助制造等诸多功能。相较于专业的有限元分析和流场分析软件,嵌入三维设计软件的功能分析模块具有操作简单,分析结果可靠的特点,使单独依靠计算机辅助设计技术,完成整个项目设计成为可能。
基于传统项目设计过程,梳理机械设计过程中的重点环节,对应到计算机辅助设计中,进而确定计算机辅助设计的核心流程节点;依靠划定的核心流程节点,建立规范化设计流程。利用建立的规范化设计流程,在垃圾清运车机械臂设计过程,引入该规范化设计流程;采用对照试验的方法,评估计算辅助设计规范化设计流程效果。本研究基于Solidworks 2021,应力分析基于Solidworks Simulation 模块。
1 设计流程核心节点梳理
完整的机械设计包括众多环节,如运动机构选型,运动学原理设计,零部件校核,和零件图与装配图绘制等,涉及机械原理,材料力学,机械设计和机械制图等多门学科。对传统机械设计流程进行梳理,确定设计过程中的重点环节。探寻计算机辅助设计体系中与传统机械设计重点环节相对应的核心节点,明确规范化流程的核心要素。
梳理过程如图1所示,传统项目化设计过程中,首先需要选定设计方案,为机械原理课程相关内容,在计算机辅助设计中对应内容为目标三维模型建立;传统项目化设计,选定方案的机构运动学分析,采用机械原理相关知识来完成,对应于计算机辅助设计中的内容为,机构运动仿真分析;传统设计环节中,零部件计算校核采用材料力学和机械设计相关知识完成,对应于计算机辅助设计中的内容为零件有限元应力应变分析;传统设计中,整个项目设计的最后环节为工程图纸的绘制,对应到计算机辅助设计体系中为工程图投影。
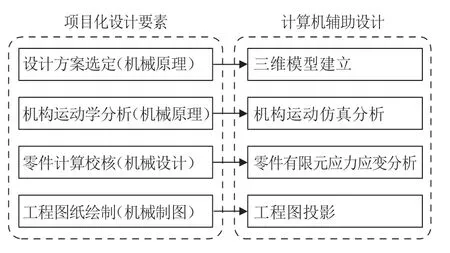
图1 设计流程核心节点梳理
经过上述梳理可知,完成整个项目设计流程,计算机辅助设计核心流程节点为:(1)三维模型建立;(2)机构运动学仿真分析;(3)零件有限元应力应变分析;(4)装配体工程图投影。
2 规范化设计体系建立
将传统机械设计过程中涵盖的重点环节,对应的计算机辅助设计中,进而确定计算机辅助设计中的核心节点,为三维模型建立,机构运动学仿真分析,零件有限元应力应变分析,和工程图投影等四个环节。为了提高项目化设计效率,现将整个流程规范化,同时依据该规范化设计体系,完成垃圾清运车搬运机械臂设计。
2.1 规范化设计流程
采用计算机辅助设计的方法,完成整个项目设计,现基于4 个核心环节,建立规范化设计流程,如图2所示,首先进行三维图形绘制,进行零件三维建模,修改。

图2 计算机辅助设计流程
零件模型参数,完成装配;其次进行运动学分析,主要目的为(1)检测是否存在零件尺寸不合理造成的干涉;(2)设计目标运动轨迹是否满足要求。方法为利用Solidworks 运动仿真模块,加载驱动,实现运动仿真;选定运动部件关键点,输出运动曲线,如不满足设计要求,返回进行三维模型参数修改,如满足,进入零件强度分析阶段;利用Solidworks Simulation 完成零件强度分析,步骤为选择零件材料,设置运动约束,与外部载荷,选定网格划分方式,进而输出应力应变云图,利用图解工具中的探针,即可得到任意位置的应力应变大小,比较应力应变是否满足设计要求,如不满足,修改三维模型尺寸,如满足进入图纸输出阶段;最后进入图纸输出阶段,选择适当的零件剖切表达方式,以及适当的零件剖切位置,后进行投影,输出二维工程图,再将Solidworks 二维工程图转化成CAD 格式工程图,最后依据国标规定,对工程图进行校核,进而完成整个设计过程。
2.2 规范化设计实例
采用传统设计方法,要经历方案选择,运动学分析,零部件校核和工程图纸绘制等步骤,需要较高的知识理论水平,和设计经验,同时设计周期较长。采用计算机辅助设计的方法,可有效提高设计效率和设计结论可靠性。垃圾清运车的垃圾桶搬运机械臂,具有多自由度,运动轨迹复杂的特点。现采用计算机辅助设计的方法,根据规范化设计流程,完成垃圾清运车搬运机械臂设计。本次设计以校园垃圾清运车机械臂为蓝本,抓取对象为240 L 垃圾桶,该垃圾桶限制重量为120 kg。设计过程为:首先进行零件测绘,建立零件模型,后完成SolidWorks 三维装配体,如图3所示,该机械臂结构分为如下部分:抱爪机构1,抱爪俯仰调节臂2,驱动小臂3,驱动大臂4 和车体连接结构5。

图3 垃圾桶搬运机械臂Solidworks 装配设计
其次,进行运动学分析,利用Solidworks 运动分析模块,检测装配体是否存在干涉;以抱爪的外边缘与垃圾桶接触点作为取样点,绘制运动轨迹,修改相关零件尺寸,直到运动轨迹满足设计要求。再次,进行零件应力分析,抱爪是机械臂抓取垃圾箱的关键部件,现采用Solidworks Simulation 完成应力分析。设置过程如图4所示:(1)设置抱爪材料为普通碳钢;(2)设置夹具连接方式为,抱爪驱动轴孔位置固定;(3)外部载荷作用在抱爪和垃圾箱接触的上边缘,240L 垃圾箱限重为120Kg,由两个抱爪共同承担,因此单个抱爪受力大小为600N;(4)计算算例后,得到应力云图,云图设置为灰度输出形式。抱爪结构上分为5 部分,驱动轴连接部1,连接梁2 与其相连接,同时连接梁2 转角后为大臂梁3,大臂梁3 转角后为小臂梁4,小臂梁4 转角后为抱爪梁5。整个抱爪结构中,应力较高的区域为大臂梁3,其中最大应力出现在连接梁2 与大臂梁3 相交位置,达到52.43 Mpa。低于普通碳钢屈服强度,表明该零件可以满足设计承载要求。
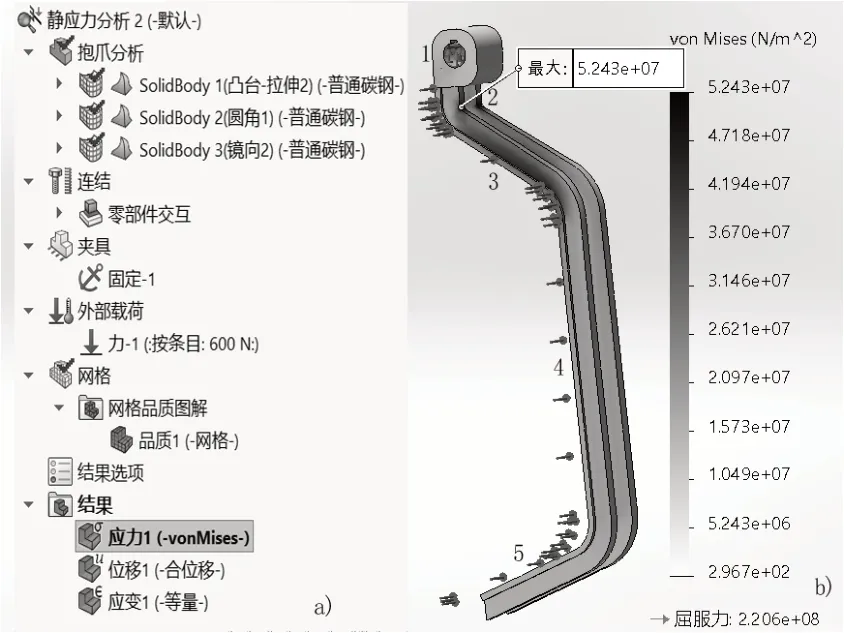
图4 机械臂抱爪应力分析
最后利用SolidWorks工程图模块,选择适当的表达方式,完成工程图投影。复杂装配体的工程图纸绘制,需要有较高的机械制图素质和工程实践经验,而这两点正是本科在校生所短缺的,利用计算机辅助设计,直观的选择全剖,半剖,阶梯剖,和局部剖等视图表达方式,选择适当的剖切位置,然后进行投影,将复杂的投影关系交给计算机完成,大大提高设计效率。
3 规范化设计体系评估
梳理计算机辅助设计核心节点,建立规范化设计流程。利用该流程进行垃圾桶搬运机械臂规范化设计,现对该规范化设计流程效果进行评估,方法如下:(1)以本科本业设计为载体,题目方向均为机械结构设计,其中,5 人采用规范化设计流程的计算机辅助设计方法,完成毕业设计,作为试验组;5 人采用传统机械设计的方法完成毕业设,作为对照组;(2)评价指标为机构运动设计,零件校核,零件图质量和装配图质量。规范化流程设计评估结果如图5所示。在机构运动设计上,实验组具有明显的优势,机构运动分析,选取样本点通过仿真获取轨迹,指导相关零件尺寸调整,明显优于传统机械运动计算;零件校核实验核试验组同样优势明显,有限元分析过程,相对于传统零件计算校核,具有更高的效率;在工程图绘制方面,零件图纸质量实验组优于对照组,而装配图质量,实验组成绩小幅低于对照组。
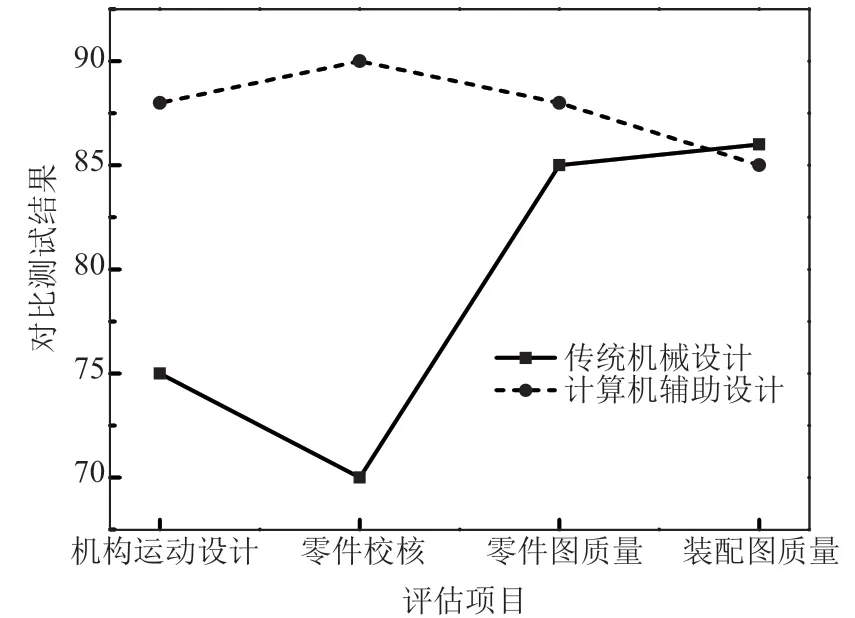
图5 规范化设计体系评估
由对比试验结果可知,在运动学分析和零部件校核环节,计算机辅助设计具有较大优势,原因如下:(1)运动学分析中,传统设计方法涉及反转法求轨迹等内容,不仅需要较高的机械原理知识储备,同时要求较高的数学素养,对于在校本科生而言,难度较大;(2)传统零件强度分析,涵盖材料力学,机械设计等多门机械专业主干课程,过程复杂,采用计算机辅助设计的方法,利用Solidworks Simulation,根据软件提示,即可完成零件校核。因此计算机辅助设计大大提高了设计效率。装配图质量,实验组成绩小幅低于对照组的原因归结为两点:(1)在进行装配体投影的过程中,剖切表达方式和剖切位置的选择不合理;(2)存在投影图纸盲目迷信,没有进行相应的图纸校核。
4 结 论
为了提高设计效率,建立了规范化的计算机辅助设计流程。首先,梳理传统设计流程中的重点环节,后对应到计算机辅助设计中,确定核心设计节为:(1)三维模型建立;(2)机构运动学仿真分析;(3)零件有限元应力应变分析;(4)装配体工程图投影。其次,基于计算机辅助设计中的关键环节,建立规范化设计体系,完善设计流程。在垃圾清运车搬运机械臂的设计中,引入该规范化设流程。对计算机辅助设计规范化流程进行评估,评估结果表明,应用该设计流程后,学生在机构运动设计,零件校核,零件图质量等方面相较传统方法,均有所提高,但装配图质量略有下降,原因为投影过程中表达方式不合理,对于投影的盲目迷信。和传统的设计流程相比,计算机辅助设计规范化设计体系,可以显著提高设计效率,降低设计门槛,对于应用型本科和各高职院校,具有很强的实际意义。
猜你喜欢
词学(2022年1期)2022-10-27
汽车实用技术(2022年11期)2022-06-20
新高考·高一数学(2022年3期)2022-04-28
内燃机与配件(2022年2期)2022-01-17
学生天地·小学低年级版(2019年5期)2019-06-05
科学与财富(2017年22期)2017-09-10
新高考·高一物理(2016年11期)2017-07-07
试题与研究·中考数学(2016年4期)2017-03-28
科技创新导报(2016年27期)2017-03-14
新高考·高一物理(2016年1期)2016-03-05