循环水养殖车间巡检机器人系统研究与设计
2022-08-28 07:44陈溢强吴振陆李泳阳成伟琳
现代信息科技 2022年10期
陈溢强,吴振陆,李泳阳,成伟琳
(广东海洋大学,广东 湛江 524088)
0 引 言
循环水养殖车间是一种在室内进行鱼类产品生产的场景,是现代养殖技术的体现。随着养殖车间规模的扩大,养殖池内鱼类数量大幅增加,鱼群密度的增大容易导致水体污染或水质变化,鱼群异常难以及时发现等原因制约着养殖车间的稳定运行。由于车间的养殖机制为循环水养殖,各个养殖池之间共用同一养殖水源,如果不能及时发现鱼体异常,将会引起致病菌在养殖系统内急速传播,因此对养殖池内鱼类生物的健康状况进行监测尤为重要。
传统的车间水养殖没有信息化技术的支持,难以适应水产养殖行业的高速发展。在水养殖车间规模扩大的背景下,使用传统人工巡检方式对鱼类生物的健康状态、行为特征进行观察,成本与劳动强度较高。而且受限于工作人员的时间精力,养殖池中的异常情况往往容易被忽略,导致鱼类生物的死亡率和发病率较高。其次,对于养殖池的巡检频率通常需要凭工作人员的经验确定,缺乏统一的量化标准。因此本文将设计一种巡检机器人对车间内各养殖池进行规律化巡检,用以降低工作人员的工作强度以及减少养殖池内异常情况的发现时间。
1 项目的实施意义
巡检机器人可实现全自动化循环水养殖车间巡检,以机器巡检代替人工巡检,大幅降低了工作人员的工作强度。数字化车间数据采集使得工作人员能够更直观地了解养殖车间的信息,减少人工巡检不全面所带来的不良影响,有助于工作人员及时发现养殖池内的异常情况,保证相应的养殖生产能够更加高效稳定地开展,有效降低生产风险。巡检机器人充分发挥了其机动性强的优势,取代了传统轨道式投料机器人,在不需额外铺设轨道的情况下,实现了定点定量饲料投放,减少水环境污染,降低饲养成本,提升车间水养殖的经济效益。循环水养殖车间如图1所示。

图1 循环水养殖车间
2 智能巡检机器人的设计
2.1 设计目标
循环水养殖车间巡检机器人的设计目标是根据工作人员的具体需求,实现全自动化车间巡检,在巡检过程中采集养殖车间内的各项信息,并将汇集的数据准确直观地呈现给工作人员。为保障巡检任务的完成,提高系统稳定性,巡检机器人应具备对外界环境变化的感知能力,针对外部环境的不确定因素及时做出自适应调整。此外,为进一步提高养殖车间的自动化及科学管理水平,巡检机器人应具备一定的实用拓展功能,如定点定量饲料投放、车间物料运输等。
2.2 设计要求
根据养殖池内可能出现的异常情况,结合巡检机器人所需执行的巡检任务以及养殖车间的环境特征,巡检机器人应具备以下功能。
2.2.1 自适应路径规划与寻径功能
由于循环水养殖车间内养殖池的规模、位置会按照生产计划进行调整,巡检机器人应具备对巡检路径的自适应调整功能,在实际运行中对养殖池的变化进行探测,自动完成路径更新;其次应具备寻径功能,可沿着车间内地面上的标识线自行寻径行驶,同时准确判断所在位置,当部分标识线出现缺失、破损等情况,或因为其他因素造成偏航时,巡检机器人可以短暂调用模糊寻径机制,快速返回预定路径行驶,提高寻径容错率。
2.2.2 养殖车间信息采集功能
巡检机器人应具备养殖车间信息采集功能,采集的信息包括图像信息及现场环境信息。巡检机器人可以实时采集养殖车间的图像以及环境数据并上传至服务器,其中,图像采集的频率、拍摄角度等相关参数可供工作人员调整。
2.2.3 远程控制功能
工作人员可通过微信小程序对巡检机器人进行远程控制,基本控制项目包括运动方向与速度、摄像头角度等。针对养殖车间内不同方位的养殖池可能存在规格不一致的情况,巡检机器人应具备控制摄像头高度的功能。在养殖车间潮湿的环境下,巡检机器人的通信稳定性需满足现场要求,具备一定的抗干扰能力。
2.2.4 自动避障功能
为提升巡检机器人在巡检过程中的稳定性以及对场地的适应性,巡检机器人应具备自动避障系统。当巡检机器人检测到其周围存在障碍物时,自动停止前进,必要时进行主动避让,以减少对车间内工作人员产生的影响;避障措施执行后,返回原定巡检路径继续执行任务。
2.2.5 饲料投放功能
饲料投放功能作为巡检机器人的实用拓展功能,可配合巡检功能使用。工作人员可提前设定每个养殖池的饲料投放量以及投料时间,巡检机器人在执行巡检任务时,可同步对相应养殖池进行饲料喷投。为了精准控制饲料的投放量,巡检机器人应搭载称重传感器。
2.2.6 电源管理功能
为了保障巡检机器人在执行任务时的续航能力以及稳定性,防止意外断电情况的发生,巡检机器人上应具备一套电源管理系统,以对电池组进行电量监测、过放保护以及故障诊断。在巡检状态下,能根据不同的巡检需求以及现场情况动态调整机器人的放电策略,优化整体功耗,延长巡检机器人的续航时间。
2.3 巡检机器人的选型设计
由于循环水养殖车间占地面积广,巡检机器人的巡检路线相对复杂,巡检路径长,观察角度广,设计机器人时需要考虑其行走自由度、巡检速度以及续航水平,机器人需要具有轻量级的运动方案,故巡检机器人宜采用轮式或履带式的运动机构。该方案优点是行走路线十分灵活、控制简单并且具备较高的定位准确度。基于养殖车间内已有的良好生产环境,仅需铺设标识线表示机器人巡检路径,机器人即可根据铺设的标识线灵活地做出路径规划,进行巡检。巡检机器人的运动速度与运动机构息息相关,轮式机器人得益于其车轮的快速转动能力,可以达到快速运动的目的;履带式机器人具有抓地力强的特点,面对恶劣环境仍有良好的行走能力。考虑到其在能耗、续航方面的要求,结合实际的生产情况,轮式巡检机器人更适宜在大面积、环境良好的循环水养殖车间进行巡检。循环水养殖巡检机器人如图2所示。
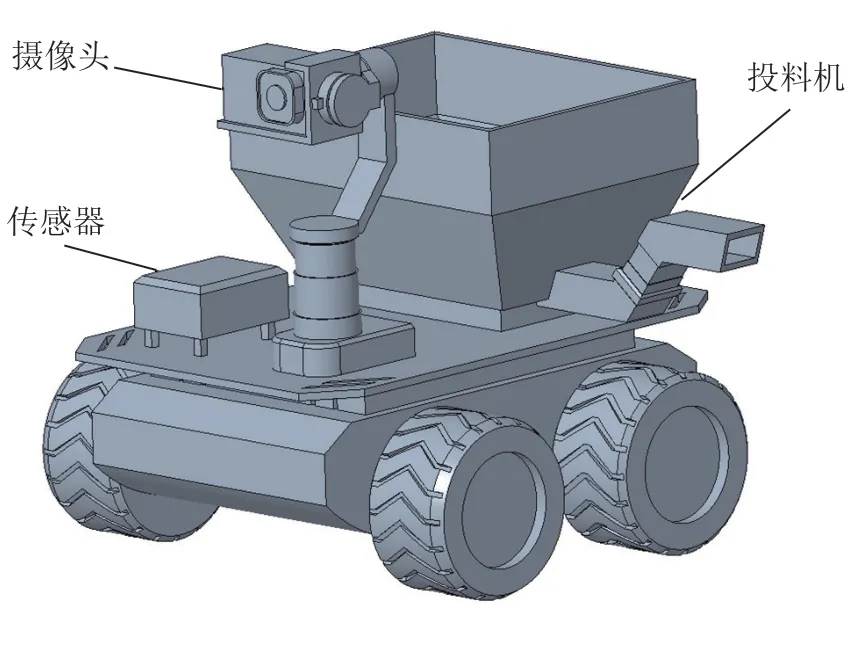
图2 循环水养殖巡检机器人
2.4 巡检机器人的功能设计
巡检机器人采用外设资源丰富、性能强、功耗低的STM32F407VGT6 作为主控制器,巡检机器人由多个子系统组成,其中环境数据感知系统包括敏感气体传感器、温湿度传感器以及光照传感器,运动控制系统用于控制巡检机器人的运动以及调整摄像头的高度与拍摄角度,自学习寻径系统与智能防碰撞系统协同工作,以辅助巡检机器人实现按设定路线安全巡检,巡检过程中可启用饲料投放系统进行定点定量投料。系统中所有用电器均由不间断电源管理系统供电。系统出现异常时,灯光报警系统发出提示信息。系统总体设计框图如图3所示。
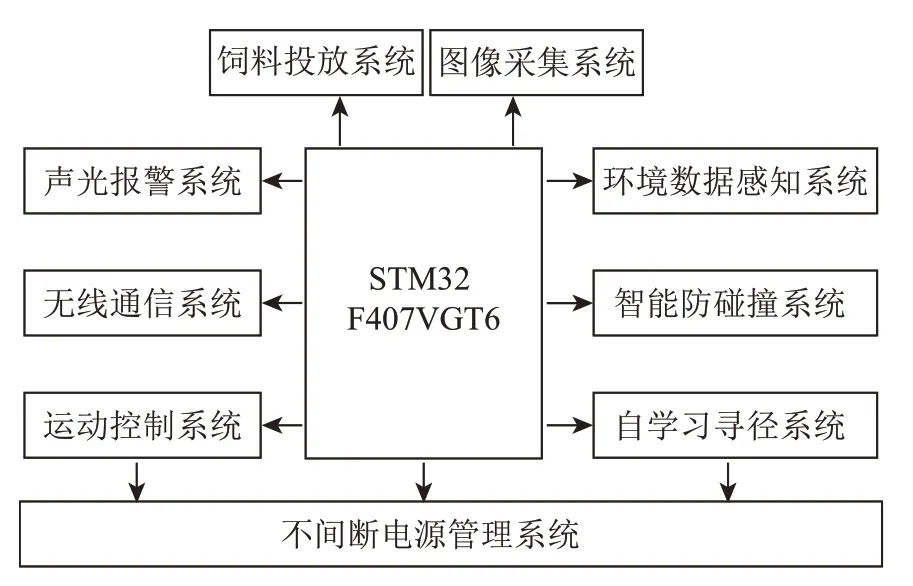
图3 系统总体设计框图
2.4.1 自学习寻径系统
巡检机器人的寻径系统由寻径传感器以及寻径算法组成。寻径传感器采用的是灰度传感器,它会根据地面的材质及其本身的颜色而产生不同的信号,得到环境反馈,从而达到寻径的效果。循环水养殖车间的巡检路线会根据生产状况调整,而调整后,需要对场景的地图进行重新构建,自学习寻径系统将在增强巡检机器人的环境适应能力中发挥关键作用。其寻径算法的概述如下:从区域起点出发,遇到路口后探索可行走的方向,按照左、前、右的优先级进行探索,探索完毕其中一个方向后将返回到上级分岔路口,继续探索其余方向,直至所有的区域终点都被探索完成,所有的路口以及区域终点将被记录并且上传到服务器,在服务器中进行渲染,为管理者构建可视化地图,自动规划巡检路线。路径自学习流程如图4所示。

图4 路径自学习流程图
2.4.2 运动控制系统
运动控制系统由机器人运动部分和摄像头云台控制部分组成,机器人运动部分负责控制行进速度以及方向,摄像头云台控制部分负责控制云台转动和升降。基于四轮驱动的机械结构之上,主控制器对电机的速度进行监测,运用PID 控制算法,精准控制电机的转动速度,根据速度的目标值与实际值的误差值,进行比例、积分和微分的运算,运算方法如公式(1)所示,得到修正值后,对电机的转动速度进行纠正,进而保证巡检机器人的行进速度;调整四个车轮的内外转速差,使得巡检机器人可以进行原地转动以及在巡检中改变运动方向,保障巡检机器人运行期间行进的灵活性以及稳定性。在巡检机器人行进的过程中,主控制器控制云台转动,带动摄像头进行左右和俯仰以调整拍摄角度,通过升降杆调整拍摄高度。电机与云台协同工作,进而实现高效完成巡检任务。

2.4.3 图像采集系统
巡检机器人搭载具有三自由度的云台和摄像头,云台允许安装在其机身上的摄像头可以进行水平转动360°以及以水平面为界的俯仰角各为45°的拍摄,可根据场景需求调整高度,使得拍摄的图像角度十分灵活,能在保证图像质量的情况下满足不同的图像采集需求。采集的图像以及传感器数据通过无线通信系统实时传输,由服务器进行后续的处理和存储。
2.4.4 无线通信系统
无线通信系统的作用是维系巡检机器人与控制软件间的通信,系统采用ESP-32S 作为通信模块,该通信模块尺寸小,待机功耗低,深度睡眠电流低至6 mA。巡检机器人通过通信模块将采集的传感器数据以及图像上传,交由服务器进行后续处理。小程序下发的指令通过通信模块传达至主控制器中,主控制器根据接收的指令控制巡检机器人各子系统的工作。
2.4.5 智能防碰撞系统
巡检机器人的载物平台上搭载超声波测距以及红外传感器,可检测前方障碍物或人员,同时为通过测距判断自身位置,实现智能防撞避障功能。当巡检路径上工作人员遮挡道路或者存在障碍物时,巡检机器人会迅即停止移动,同时发出警示声,提醒工作人员注意躲避,与此同时,若检测到障碍物长时间未移动,机器人将主动绕开障碍物,返回原定巡检路径继续进行巡检。考虑到工作人员以及财产安全,巡检机器人的机身上贴有警示标志,以提醒工作人员进行避让,防止造成人员或设备损伤。
2.4.6 饲料投放系统
基于巡检机器人的机械结构设计,机器人拥有一定的承重能力,可在机器人上方的平台处架设饲料投放系统进行饲料投放。饲料投放系统包括漏斗、称重传感器、鼓风机以及承载鼓风机的转动云台。称重传感器运用带HX711AD 模块的10 kg 量程称重压力传感器,四个称重模块组成一组,饲料额定载重为25 kg,主控制器通过读取传感器模块数据获得饲料的实时重量,以判断当前养殖池的投料是否足够以及漏斗是否需要补充饲料。主控制器控制鼓风机底部的螺旋扇叶转动产生压强差,使鼓风机内空气快速流动,吹动饲料从喷射口中投放到养殖池中。自动调整螺旋扇叶转速可以调整投放距离,自动转动云台允许鼓风机调整方向,同时可以对投料管道进行伸缩调整,适应养殖池的高度,达到饲料均匀投放的效果。
2.4.7 不间断电源管理系统
该系统由电池组检测、电池组切换、电源控制共三个子系统组成,系统的工作原理如图5所示。巡检机器人上搭载了主电池组与若干备用电池组,电池组检测系统用于检测处于通电状态的电池组,检测项目包括电量,输出功率、电池温度等信息,无线通信系统将这些信息实时发送至服务器。当检测到电量过低、断路、过放等异常情况时,电池组切换系统自动切断异常电池组,同时在极短的时间内切换至备用电池组,保证了巡检机器人的稳定运行。电源控制系统用于控制电池组的放电策略,能够根据巡检机器人的工作模式控制相关用电器的开启与关闭,以降低功耗,延长续航时间。例如:当采用手动巡检模式时,电源控制系统将自动切断寻径传感器的电源。
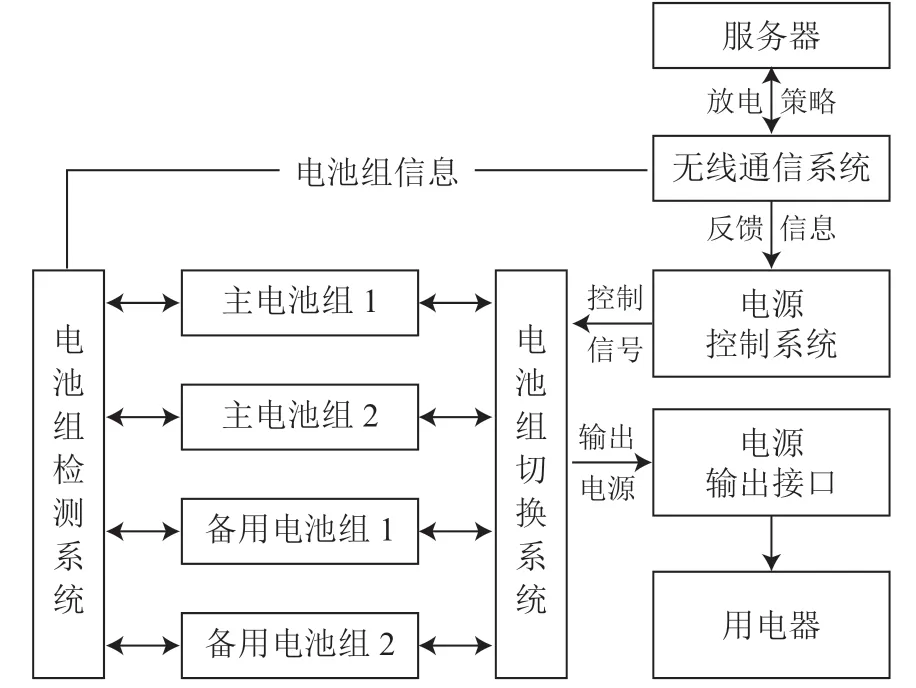
图5 不间断电源管理系统工作原理图
3 应用场景
该巡检机器人的应用前景广阔,主要应用于自动化养殖车间巡检、定点定量饲料投放、养殖车间物资运输等。
3.1 自动化养殖车间巡检
在养殖车间内,巡检机器人能在预定规划的路线下自动完成日常巡检任务,包括巡检、监测、采集图像等,实现养殖车间的实时数据监测、反馈与传输。在路线规划方面,应用自适应路径规划与寻径算法,自动对场景内的巡检需求做出最佳路线择选,降低整体巡检时间。巡检机器人通过测距进行实时定位,利用自身搭载的高精度传感器采集养殖车间的温湿度、光照强度以及敏感气体浓度等环境信息,将实时位置与环境信息一并反馈至工作人员的微信小程序中,帮助工作人员快速获取养殖车间整体的生产环境信息,缩短工作人员对生产调整的反应时间,提高养殖车间的科学管理水平。巡检机器人微信小程序界面如图6所示。
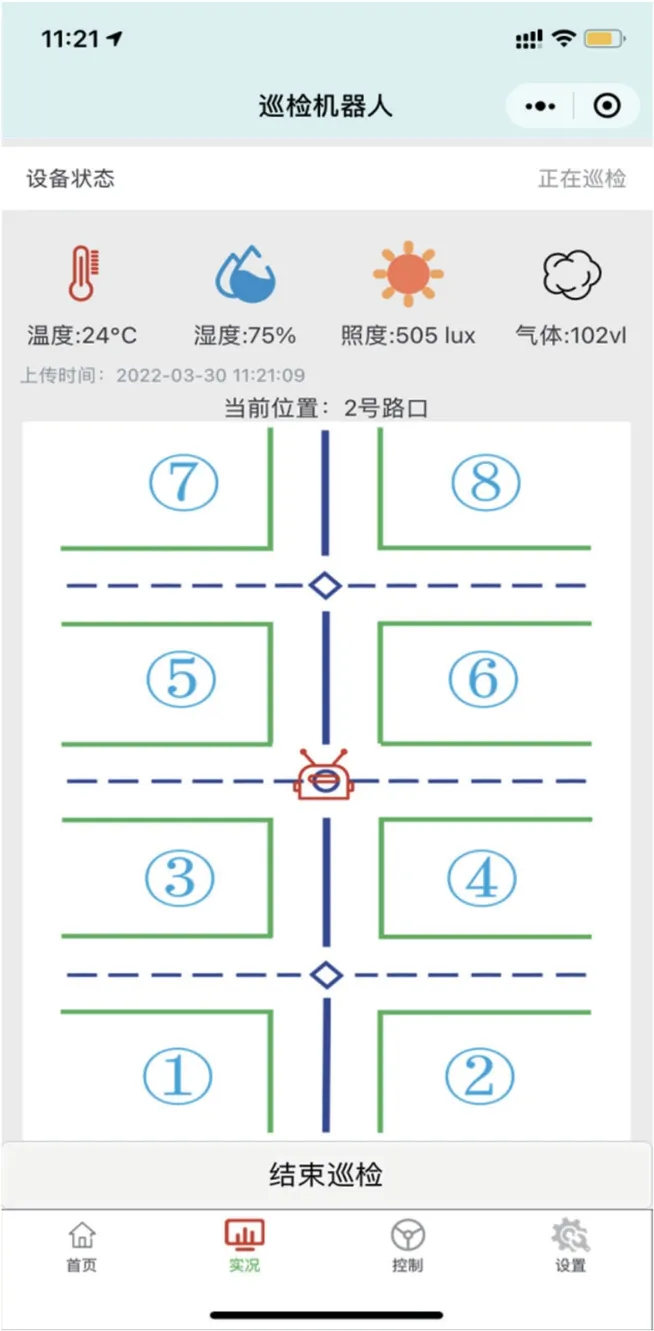
图6 巡检机器人微信小程序界面
3.2 养殖车间定点定量饲料投放
巡检机器人的导航避障能力、饲料投放系统结合巡检机器人微信小程序,可以实现循环水养殖车间定点定量饲料投放。工作人员在微信小程序中设定需要投放饲料的养殖池以及所需投放的饲料重量,机器人将自动执行任务,在养殖车间内进行饲料投放。除了支持即时饲料定量投放任务,该机器人还支持定时饲料投放,提前预设饲料投放时间,到达预定时间后,巡检机器人将前往目标养殖池,执行饲料投放任务,提升循环水养殖车间的自动化水平。
3.3 养殖车间物资运输
巡检机器人可以实现生产物资、工具以及产品的运送。在循环水养殖车间中,依赖于巡检机器人稳定的承重框架、高精度的自主导航技术与定位技术,各巡检机器人之间可以在统一管理下协同运作,互不干扰,形成养殖车间物流运送体系。巡检机器人可以实时、安全且高效地承担起车间内运输的任务,降低养殖车间对人力资源的需求,节省劳动力方面的开销。
4 结 论
巡检机器人应用到循环水养殖车间后,能够有效提高巡检效率以及提升循环水养殖车间的自动化与科学管理水平,节省人力成本。巡检机器人将会在未来的循环水养殖产业中,发挥越来越重要的作用。后续将为巡检机器人加入AI 技术,利用机器视觉及时发现养殖池内的异常情况并及时通报工作人员,降低工作人员就事故调整生产策略的滞后性。
猜你喜欢
今日农业(2022年15期)2022-09-20
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年4期)2022-03-07
汽车观察(2021年8期)2021-09-01
中国计算机报(2021年10期)2021-04-27
湖南饲料(2017年5期)2018-02-08
农村农业农民·B版(2018年11期)2018-01-28
南方周末(2016-12-19)2016-12-19
股市动态分析(2015年29期)2015-09-10
湖南饲料(2015年1期)2015-04-07