
在线水质监测无人船的设计与实现
2022-08-27 10:19苗飞张波刘杨
船海工程 2022年4期
苗飞,张波,刘杨
(中国船舶科学研究中心,江苏 无锡 214082)
目前城市河道水质监测方法主要以物理化学监测技术为主,传统的城市水体监测手段主要依靠布设的监测站点,利用人工或者半自动的监测手段来获取站点上的水资源信息,或者采用人工现场采水回实验室检测的方法,这两种方法需要投入的成本高、耗时长、覆盖水域也有限,不能满足城市水体监测监管的要求。而近年来逐步得到应用的遥感监测技术,主要应用于城市区域大中尺度的水环境监测,难以适应城市河道水域环境复杂多样的特点。随着自主控制技术的发展,以无人船为代表的无人搭载平台,在河道水文测量、水环境监测等方面发挥着越来越重要的作用。通过无人船平台搭载水质监测设备可以实现走航式的在线水质监测,不仅能够降低作业环境条件的要求,还能够显著提高水质监测效率。基于此,设计一种智能在线水质监测无人船,开展无人船总体布局及集成、自主控制系统、一体化水质监测系统等的设计分析,并对无人船的在线监测功能进行实船验证。
1 无人船系统组成
在线水质监测无人船主要针对城市河道的水体生活源有机污染问题,服务于城市水环境的监测与监管。采用小型无人船搭载多种水质检测分析设备对城市水环境中的生物源有机污染指标进行原位在线监测。
无人船主要系统和设备包括船体结构、动力推进系统、电力系统、通信系统、导航设备、避障设备、船载控制系统、岸基控制系统及一体化水质监测系统等。船载控制系统是实现无人船自主航行的载体。岸基控制系统主要完成对无人船的监控和任务管理。避障设备为自主航行提供水面目标信息。导航设备为无人船高精度定位授时能力提供保障。通信系统是实现无人船与岸端信息交互的渠道。一体化水质监测系统集成自动水样采集设备和多种水质检测设备,可以实现对水样快速在线处理及分析。
2 无人船总体布局设计
由于无人船所搭载的仪器设备较多,对搭载能力要求较高(>85 kg),且无人船的尺寸受到吊放等因素的严格限制,综合考虑船型、主尺度、航速、续航时间、载荷搭载能力、动力推进方式、使用方式等的要求,开展无人船总体布局优化与集成设计。如图1所示,船体采用了浅槽道消波船型,在主尺度限制范围内尽可能增大船体方形系数,满足作业系统设备的搭载空间需求,同时也适合在城市河道浅水环境使用。船体结构采用凯夫拉复合材料,重量轻且强度高。无人船的主要技术参数见表1。

表1 无人船主要技术指标

图1 浅槽道消波船型横剖面图
无人船总体布局如图2所示。舱内中前部主要布置水质检测分析设备,舱内后部设置控制盒和锂电池组等设备,舱底设置推进轴系。甲板艏部设置组合惯导天线、毫米波雷达、高清摄像设备等,甲板尾部设置组合惯导天线、通信天线等。实船见图3。
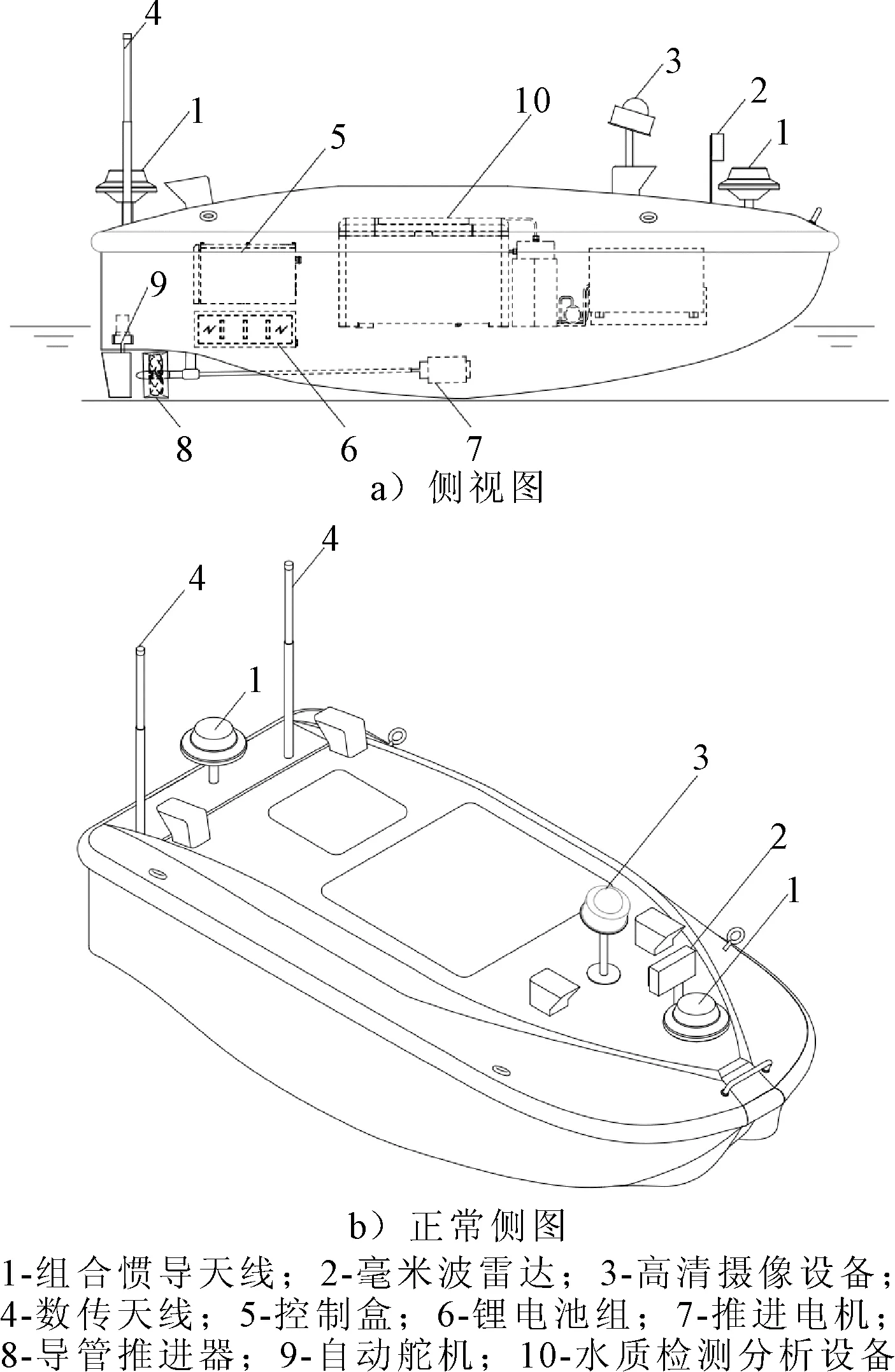
图2 无人船总体布局

图3 无人船实物
3 自主控制系统设计
自主控制系统作为无人船的控制核心,应相对独立、可靠运行,同时与其他系统接口界面清晰。其硬件系统架构见图4。
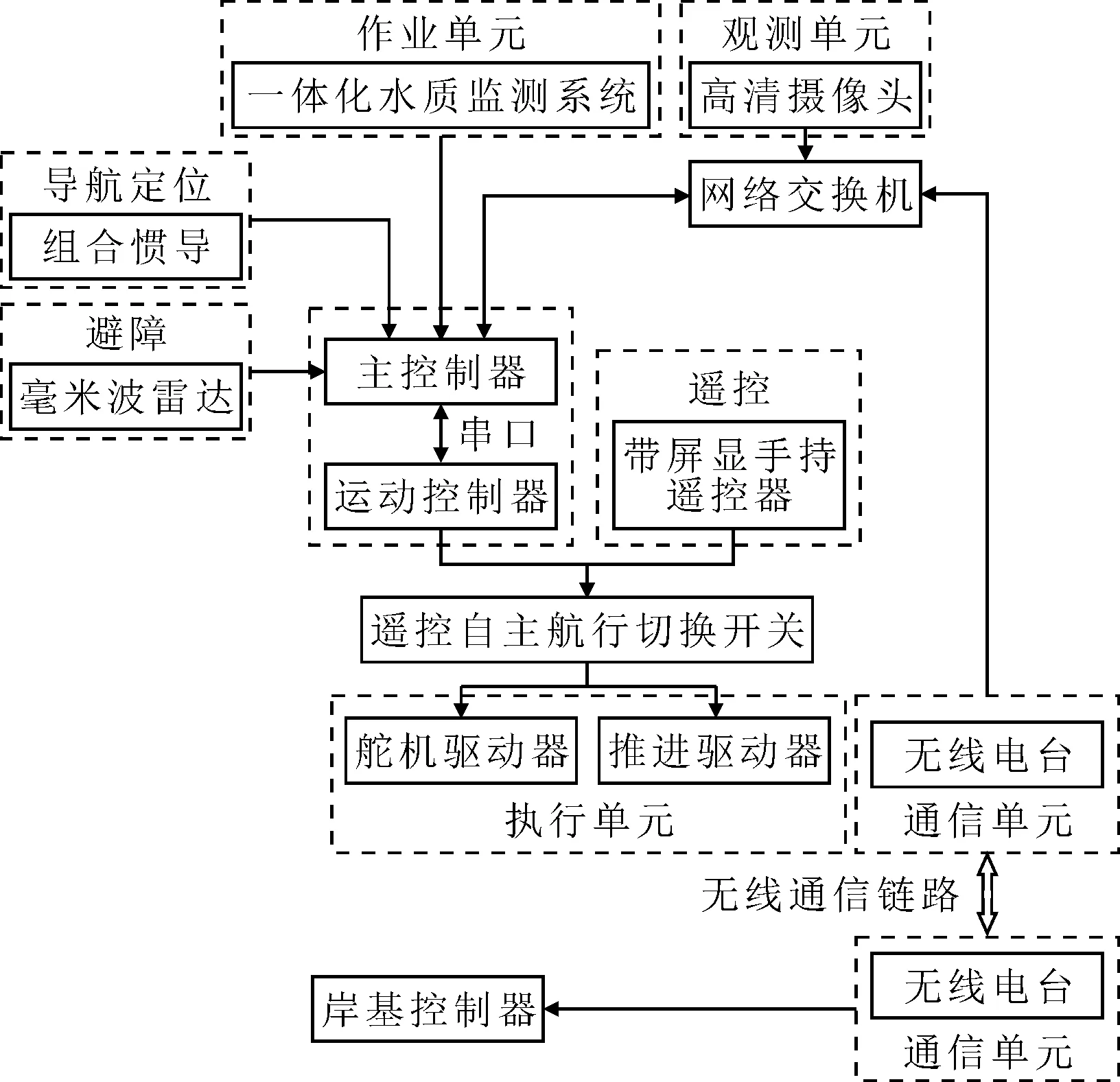
图4 自主控制系统硬件架构
自主控制系统分为船载与岸基两部分。船载部分包括控制器、导航定位单元、避障单元、执行单元、通信单元、观测单元、作业单元等,岸基部分包括岸基控制器、通信单元等。船载的控制器是控制系统核心,主控制器负责接收来自导航定位单元与避障单元的位置、姿态、障碍距离等信息,作为控制回路的反馈输入;主控制器利用建立的参考模型,根据实时的测量信息,计算得到航行指令,发送给运动控制器,同时负责数据存储与通信,结合通信单元与岸基完成信息传递。运动控制器负责无人船运动控制,操纵推进装置等执行机构动作。通信单元采用无线数传电台设备组建船岸无线通信链路,实现无线数据通信。岸基部分的控制器负责接收船载数据的复杂计算与处理,实现无人船的遥控、自主航行控制及无人船的监控等。无人船可根据需要选择采用遥控/自主航行两种工作模式。
无人船上搭载的一体化水质监测系统设备与船载主控之间采用RS485/RS232/CAN通信接口。
无人船自主控制系统软件包括PLC软件、船载主控制器软件、岸基综合信息显控软件。PLC软件主要负责操纵机构运动控制、系统配电控制与主控制器通信;船载主控制器软件主要负责与岸基系统通信、遥控指令解析、航迹跟踪等算法运算、运动指令生成、设备状态监测及信息采集、测量数据采集与存储与PLC通信等;岸基综合信息显控软件主要负责人机交互、轨迹显示与船载主控制器通信,具备无人船岸基一体化集成通信功能,显示功能,无人船航迹规划、控制、配置及数据读取,任务载荷控制、配置及数据读取,图像显示存储等功能。
岸基软件与船载主控软件之间可以采用无线通信,使用TCP/IP协议。软件整体架构采用TCP/IP网络协议组件服务器与客户端,实现岸基软件与船载主控软件、船载主控软件与PLC软件之间的以太网通信。系统软件通信架构如图5所示,岸基软件部署在岸基计算机上,船载主控软件部署在船载主控制器上,PLC软件部署在船载运动控制器上。

图5 自主控制系统软件架构
基于自主控制系统架构,进行无人船自主导航与控制策略设计,流程见图6。

图6 无人船自主导航与控制策略的流程
根据作业任务要求规划无人船初始航线,无人船在接收到目标航线点后,调用轨迹跟踪和运动控制算法控制船体沿着预设的路线航行。船载雷达等避障设备在航行过程中对水面环境进行实时探测,并对感知数据进行融合与处理,从而得到水面障碍物的状态信息。通过计算无人船与障碍物之间的最近会遇距离(DCPA)和最近会遇时间(TCPA),分析碰撞风险。若存在碰撞的可能,则调用速度障碍模型算法,计算局部最优避碰策略并发送给执行机构。在完成避碰后,重新调用视线法进行航迹跟踪,控制无人船回到预设航线。
4 一体化水质监测系统设计
无人船的一体化水质监测系统主要包括自动采样装置、水质检测分析设备和数据采集及集成系统,其中自动采样装置由标准采样器、溢流池、废液池和流通水路组成,水质检测分析设备由1台有机物在线分析仪、1台光谱水质监测仪、2台流动分析仪和1台溶解氧设备组成。通过集成设计,无人船可以快速反演水体有机物、硝酸盐氮及特征污染物的浓度,并可直接对水体中的氨氮、总磷、总氮、高锰酸盐指数等物质的含量进行定量检测。水质检测分析设备的主要技术参数见表2。

表2 水质检测分析设备主要技术指标
数据采集及集成系统用于连通标准采样器和水质检测分析设备,实现采样装置的自动控制,触发水质检测分析设备开始检测,接收/发送命令,读取、接收、处理及存储载荷数据。主要由载荷控制单元和载荷控制端软件组成,其中载荷控制单元与自主控制系统的控制模块共用,主要用于接收载荷控制端软件发送的命令,通过启停电磁阀来控制电路的通断,以实现电路的自动控制,同时作为数据存储站,将各个硬件、水质检测分析设备的数据联通在一起;载荷控制单元在接收载荷控制端软件命令后,启停泵、控制阀等,进行自动水样采集;载荷控制端软件通过预置程序,来控制采样时间、采样动作,获取各种水质检测分析设备的数据,集成于综合处理模块中,传输到各对应位置,并实时监测载荷、设备连接情况。一体化水质监测系统作业流程如图7所示。通过采样泵将水样抽取到溢流池中,采用集中供样的方式将水样分流给载各水质检测分析设备。对水样分析完成后,无污染的废水直接排出船体外,有污染的用废液瓶收集起来,集中处理。

图7 一体化水质监测系统作业流程
5 实船应用测试
为了验证设计的无人船的自主控制系统的可行性,在太湖水域进行水上试验。测试结果显示,无人船在远程控制状态下,可以实现按预设路径的自主巡航。如图8所示,无人船以4.0 kn的航速按预设的长方形路径进行自主巡航,从图8中可以看出,无人船具有较高的循迹精度。
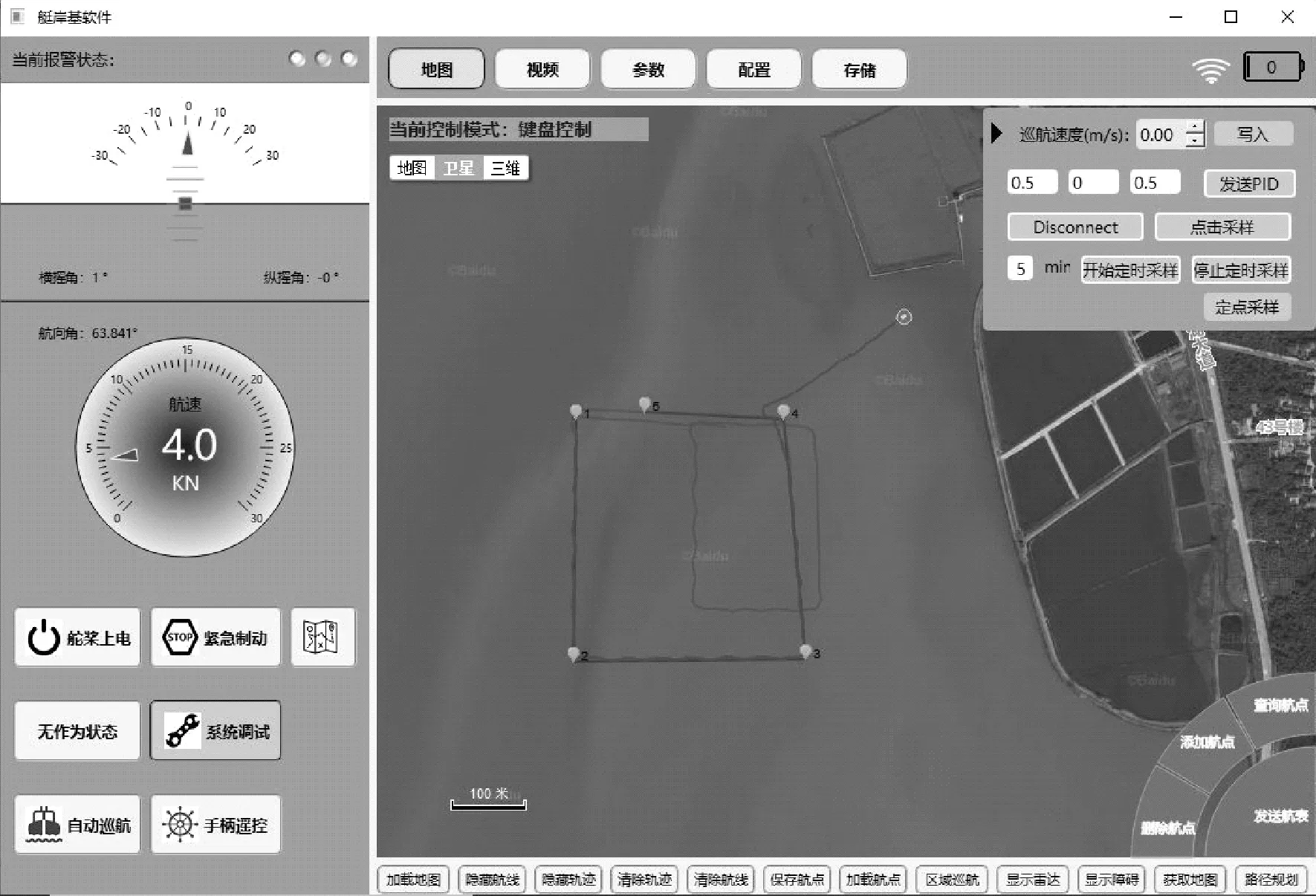
图8 无人船实现自主规划路径
为验证无人船的在线水质监测功能,在镇江、扬州两地的河道进行实船作业测试(见图9),测试船速为2 m/s。实际测试结果显示,有机物在线分析仪、光谱水质监测仪和溶解氧设备每2 min可以测得一组数据,流动分析仪每3 min测得一组数据,测得的水体氨氮、总磷、总氮、COD(Mn)指标和有机物浓度等水质参数部分结果见图10。

图9 无人船水上作业测试现场
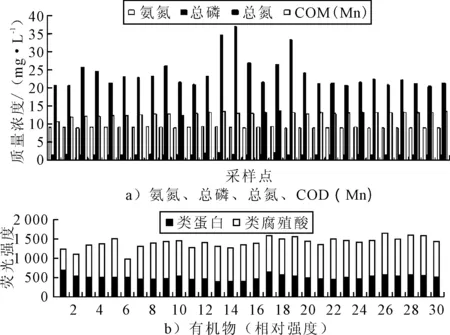
图10 无人船水质监测结果
为了更方便地对水质监测数据进行存储和集中调取,开发了一体化水环境监测数据系统,该系统部署在云端,其中一个界面见图11。图中左侧为采集位置地图信息,右侧为按水质检测分析设备类别展示的水质监测数据信息。

图11 一体化环境监测数据系统界面
6 结论
所提出的在线水质监测无人船系统,完成了无人船总体布局集成设计、自主控制系统设计及一体化水质监测系统设计,并基于搭建的无人船平台进行了实船应用测试,测试结果表明,在线水质监测无人船可稳定运行,实现了无人船航行、采样、检测、数据处理的全自主和自动化控制运行,且可以通过船载无线将水质检测数据传输至岸基,并上传至云端进行展示和存储。
在线监测无人船是对传统水质监测方式的有效补充和智能升级,在复杂多变的城市河道作用明显,可有效提升河道水体监测的效率,有助于增强水环境的整治与监管水平。
由于船体空间的限制,仅搭载了标准采样设备,可通过进一步的优化设计,实现水华采样、分层采样等设备的模块化搭载,满足多样化的作业场景需求。
