
基于机器视觉的十轴协作教学贴标机研究与设计*
2022-08-26 07:58魏鸿磊刘乘昊杨祎宁马晓光赵建帮
机电工程技术 2022年7期
魏鸿磊,刘乘昊,王 晶,杨祎宁,马晓光,赵建帮
(1.大连工业大学机械工程与自动化学院,辽宁大连 116034;2.大连船舶重工集团有限公司,辽宁大连 116021)
0 引言
随着全球科技创新持续发展,智能社会正在向我们走来,世界大国把制造业作为促进经济发展的战略选择,各大国家提出不同的有关制造业的计划,中国提出了《中国制造2025》[1]计划,致力于实现从工业大国向工业强国转变,针对人才缺乏问题,2017年教育部批准成立“智能制造工程”专业[2],2018年苏州大学开设了智能制造新工科专业,新专业涉及新技术,实践性强,为紧跟国家发展,提供专业建设要求,提升学生创新实践能力,亟需教学平台供学生学习[3-4]。
光、机、电一体化技术已成为当前社会发展大势所趋,提高工业上工作效率,在智能制造中有绝对的优势[5-7],本文提出集光机电于一体的贴标机控制系统,涉及知识广、内容丰富、实践性强,易于激发学生的学习兴趣,培养学生拓展能力、提升创新能力。但在目前国内贴标机产业中大部分用途为工业生产。马博文等[8]提出一种基于CarSim、Isight及MATLAB仿真平台的前悬架K&C特性参数的优化方法;Márcio Mendona[9]基于神经网络学习相机标定,提出了一种神经校准方法;于凯旋等[10]运用系统图像处理算法提高芯片检测效率;李瑞丹等[11]提出了一种工业化的紧凑型桌面贴片机。
为紧跟智能制造发展,抓住社会发展趋势,解决光机电一体化设备教学应用设备较少的问题,本文提出一种基于机器视觉的十轴协作贴标机控制系统,使学生充分了解智能制造的优势,培养学生兴趣、实践能力和创新能力。
1 硬件设计
1.1 机械结构设计
本研究贴标机组成如图1所示,由视觉系统、上位机、控制系统、执行系统组成。其中视觉系统包括工业相机、镜头、光源,控制系统包括运动控制卡、接线盒、传感器、气动装置,执行系统由伺服/步进电机、末端执行器等组成。

图1 贴标机系统组成
本设计优势在于增加了视觉系统,为保证图像捕捉的精准度,除了机台底盘要求极其稳定以外,还需要相机抓取图像快速、稳定、清晰。工业相机采用海康威视工业相机系列产品,海康在2016 Vision China中展现出其面阵、线阵相机强大的缺陷检测、定位引导等功能[12],大大提升了图像处理的效率,使运行程序更加稳定,并且可以让学生学习到丰富的视觉内容,培养学生在视觉领域的兴趣。
1.2 平台组成
贴标机实训平台实物如图2所示,本实验平台需满足结构紧凑,设计简单,响应灵敏等设计特点,所以选择步进电机作为驱动电机。该平台包括两套伺服电机、八套步进电机;一套雷赛DMC3C00控制卡和ACC-XC00驱动器;一套气动末端执行器;一台上位机,一台HIKROBOT-CE系列相机等。上位机提供人机交互接口,控制贴标机自动运行完成自动贴标作业,并对机台实时运动状态进行监控。
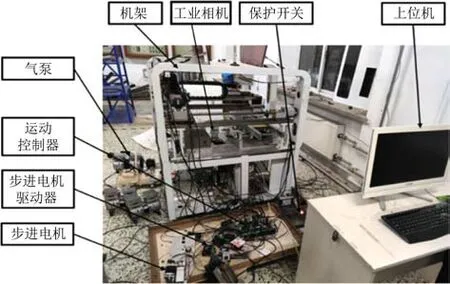
图2 贴标机原型系统
2 软件设计
贴标机软件系统主要为上位机程序编写,上位机主要实现贴标机的自动运行、点位示教、相机引导、IO控制、协作抓取5大实验功能,由C#语言编写,主要由主控制界面、系统设置界面、产品设置界面以及接口程序组成。在点位示教实验块中,操作人员可以在操作界面上通过修改点位参数、输出脉冲从而控制轴运动的机械坐标以及运动速度,在示教结束后按下主界面上的“复位”按钮,电机驱动轴回到预设初始值,实现贴标机整体复位。在相机引导模块中,操作人员通过抓取图片,框处ROI区域,获取图像模板,通过图像处理算法提取图像特征,来匹配后续图片。为培养学生灵活思维能力、创新创造能力,IO控制、协作抓取、自动运行模块设计成半开放性实验,由操作人员操作IO口的输入、输出从而控制吸盘完成抓取实验,可自主设置点位、IO开闭来控制多个轴在不同位置抓取的多样性。C#编写时设置多个接口,学生可自主在接口下编写代码,开发思维,丰富贴标机系统。操作人员自主设计好点位并保存到工程文件下,即可实现自动运行,并在协作抓取界面直观地监视抓取匹配的成功率。
3 算法设计
3.1 视觉示教控制变量算法
本设计由上位机控制相机抓取图像,进行图像处理提取特征值并匹配目标物料的操作。由上位机初始化系统数据,每个物料的特征是不同的,但机台坐标和相机坐标之间的转换关系是相同的,提取新物料特征之前要先确认系统设置是否已经载入。不同环境中光线变量难以控制,通过控制预处理中图像对比度以及曝光时间,使得最终处理图像的清晰度处在模板算子阈值内,从而得到稳定的模板特征值,完成示教。视觉示教控制变量流程如图3所示。

图3 视觉示教程序流程
3.2 工件特征模板生产及定位
不同的工件都有其独特的特征,特征提取生成模块用于匹配不同工件文件,创建一个特征模板ID。程序运行时对采集到的工件进行图像特征提取,与模板ID匹配,根据匹配结果确定是否为需要进行操作的工件及工件种类。
特征提取和模板匹配是机器视觉系统中极为重要的一环。Halcon提供的模板匹配方式主要非为两种:基于灰度值匹配和基于形状匹配。形状匹配可以做到即便是在恶劣的环境、混乱或非线性的光线、部分遮挡的情况下也能有极高的辨识度;灰度值匹配则是匹配在整个ROI区域内的所有特征,即便光线发生线性变化也能进行识别,但匹配的分值相对较低[13]。由于系统需要稳定性较高的工作环境,故采用基于行形状的模板匹配方法。提取工件特征模板及定位流程分为以下3步:(1)图像预处理。工业相机采集到的图像具有一定噪声,故需要对其进行降噪处理。使用scale_image和emphasize算子调整图像对比度并进行增强;调用gauss_image对图像进行高斯平滑处理,对邻域内像素进行平均,给予不用位置像素不同值,消除高斯噪声。(2)生成特征模板。调用Halcon的create_shape_model算子输入金字塔层数、允许旋转角度等参数,生成一个特征ID。(3)视觉定位工件坐标信息是整个贴标机系统的核心,获取图像平面坐标转化为机械坐标信息,从而控制精准抓取工件。调用Halcon的find_shape_model算子配合特征模板ID生成Score,通过Score与预设分数判断是否存在与模板相似的工件。得到工件坐标信息通过视觉比例尺转换成机械坐标,最后发送给控制卡进行贴标校准运动。
3.3 二维仿射变换求转角算法
在基于机器视觉的十轴协作贴标机系统中,比较目标物料相对模板物料转角是不可或缺的一步,传统的提取物料最大外接矩形,并根据矩形边角四点求出中心点坐标,对比求出转角的方法需要图像有良好的清晰度,由于算法本身缺陷,迭代出最终结果飘忽不定,导致匹配失败,往往达不到想要的效果[14]。
本设计采用二维放射变换的方法,能够在一定程度上减小图像清晰度带来的影响,可以更准确地得到物料相对偏移角度。创建初始目标函数为:
定义一个二维坐标:

转换其次变换矩阵:

为了能实现旋转我们规定在二维坐标基础上补充一个1,即:

式(3)中x、y、1分别代表的二维坐标的x坐标,y坐标以及规定的其次变换矩阵。
经过极坐标转换得:

逆时针旋转α后带入(3)得最终旋转公式

式中:α为旋转角度。
旋转角度识别与定位具体步骤如下:
(1)从视觉摄像头获取图像模板数据,提取其中图像中心横纵坐标x、y,作为输入数据;
(2)将待测物料移动到视觉捕捉范围内,获取图像数据、提取待测物料中心横纵坐标x0、y0,作为输入数据;
(3)将(1)与(2)中的输入数据代入公式,通过计算机计算得旋转角度。
4 实验功能测试
4.1 视觉引导测试实验
视觉引导测试实验数据如图4所示,学生可通过更换不同焦距摄像头抓拍不同距离图像,来进行标定与图像处理。还可选择Canny、SGBM以及SSD等算法来识别目标物料中心点坐标,反馈给控制卡,来引导贴标机精准抓取目标物料。

图4 视觉引导实验
4.2 点位测试实验
点位测试实验如图5所示,通过点击不同方向轴位按钮,控制贴标机驱动到想要到达的点位。本系统速度示教设置分为快速移动与慢速移动。快速移动:轴以较高的速度移动;慢速移动:轴以较低速度移动。本系统移动示教设置分为点动与定长。点动:点击轴位方向按钮,得到脉冲驱动轴运动,反之则停止运动;定长:可给轴位移动设置指定距离,从而使轴运动到指定位置。也可通过点击“复位”按钮让贴标机还原动作程序,回复初始点位。
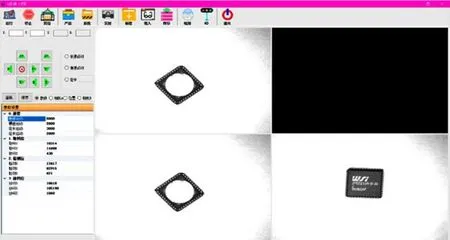
图5 点位测试实验
5 结束语
为解决光机电智能制造、机器视觉等新专业实验装置短缺、学生自主创新实践能力亟待提升等问题,本文完成了基于机器视觉的十轴协作教学贴标机机械结构设计、硬件设计、上位机软件开发。为提高视觉采集精度,提出了控制变量法提高图像清晰度、二维仿射变换算法使目标物旋转角度的计算更加准确。基于机器视觉的贴标机控制平台贴近工程实际,学生既可以自己动手设计、无限想象、学习编程,同时也是一个了解多门理论知识、浅学工业流程的一个平台。由于在贴标机设计过程中,学生参与了整个任务的实施过程,动手操作,互相协作,认真学习,扩展思维,因此对整个过程产生了极大的兴趣,取得了不错的成绩。非常适合在新专业自主创新实践教学中推广应用。
猜你喜欢
建材发展导向(2022年23期)2022-12-22
建材发展导向(2022年20期)2022-11-03
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
建材发展导向(2022年12期)2022-08-19
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
智能制造(2021年4期)2021-11-04
河北北方学院学报(自然科学版)(2021年3期)2021-04-12
航天制造技术(2020年4期)2020-09-11
考试与评价·高二版(2020年2期)2020-09-10
神州·上旬刊(2018年5期)2018-06-05
