
基于加权融合-UKF的UWB室内混合定位*
2022-08-26 07:58郭俊权高伟强刘达刘建群梁学胜
机电工程技术 2022年7期
郭俊权,高伟强,刘达,刘建群,梁学胜
(1.广东工业大学机电工程学院,广州 510006;2.佛山科莱机器人有限公司,广东佛山 528225)
0 引言
随着科技日益进步,人们对位置信息的需求越来越大[1]。仓储物流、机器人送餐、医院咨询等复杂室内环境对定位技术提出了新挑战。室内定位技术多种多样,主要有红外线、超声波、蓝牙、ZigBee等。与这些技术相比,超宽带(Ultra-Wideband,UWB)技术具有穿透力强、功耗低、抗多径效果好等特点[2]而被广泛研究。UWB定位技术在室内常见的测量方法分为4类:信号强度分析、到达角度、到达时间以及达到时间差。其中到达时间(Time of Arrival,TOA),因系统成本较低且定位准确而被应用到实际生活当中。
在视距良好的情况下,基于Chan、Fang等多类定位算法均能精确定位,保证定位需求。在有人员流动或障碍物的非视距(Non Line of Sight,NLOS)情况下,定位算法性能急剧下降,定位结果偏移严重。研究人员[3-10]从信道模型、视距信号鉴别、混合算法等角度对UWB定位情况进行了探讨。其中杨亚楠[11]设计卷积神经网络对超宽带信道环境仿真进行了分类研究,准确率达到93.4%;杨紫阳等[12]通过设定门限值来鉴别NLOS误差,剔除含有较大NLOS误差的测量值。李娅菲[13]建立由TOA等多种测量方法得到的距离值的测距信息库,进行联合判定剔除非视距误差。为解决NLOS引起的误差,本文提出一种基于加权融合-UKF的联合定位算法。该方法使用卷积神经网络(Convolutional Neural Networks,CNN)对数据进行预处理,改善测距信号的稳定性,同时使用指数加权移动平均(Expoentially Weighted Moving Average,EWMA)对原始数据进行处理,保留原始数据的数字特征。然后对上述得到的两批数据进行加权融合,再使用无迹卡尔曼滤波算法(Unscented Kalman Filter,UKF)进行定位解算,从而减少NLOS误差的影响。
1 相关流程及原理介绍
本文采用一维CNN(1D-CNN)、加权融合、UKF三者结合的方法对UWB测距信号进行定位解算。1D-CNN可用于一维信号处理,其降噪能力优越,解算速率快,对UWB测距信号有明显效果,但对于远距离的数据拟合有一定偏差。因而引入加权融合思想改善远距离的数据拟合质量。首先对原始测距信号进行EWMA处理,然后根据实验测试数据得出适合的加权函数,将其结果与1D-CNN处理的数据进行加权处理,最后由UKF建立定位方程进行解算。具体流程如下:(1)基于TOA定位原理,各个基站通过双边双向测距方法获取到标签的距离;(2)设计搭建1D-CNN的网络结构,对模型进行训练测试,并保存最优参数;(3)使用EWMA对原始测距信息进行平滑处理;(4)引入加权融合算法,对步骤(2)(3)所得数据进行融合;(5)根据UKF建立定位方程,进行解算。整体流程如图1所示。

图1 定位流程
1.1 TOA定位原理
本文采用TOA定位方案,由基站向标签发送轮询消息进行测距,得到标签到各自基站的距离,以此来计算标签在基站坐标系中的位置。TOA定位模型可表示为:

式中:(xi,yi)为第i个基站的平面坐标;(x,y)为标签的位置坐标;di为标签到第i个基站的距离。
1.2 1D-CNN
卷积神经是深度学习的一种模型,其输入层可以处理多维数据。利用CNN进行数据预处理,相比于传统的滤波处理手段,其具备更强的去噪能力,可以通过单一模型抑制不同水平噪声。本文利用多层1D-CNN对UWB信号进行数据处理。对UWB信号进行特征提取时,卷积核大小分别设置为27×1、7×1、5×1,前期使用大卷积核消除噪声、中后期使用小卷积核提取有效特征。卷积层后接全连接层,起到降维和“防火墙”的作用。图2所示为UWB测距信号在1D-CNN中的全部处理过程。可以明显看出经过1D-CNN处理的UWB测距信号跳动幅度远小于原始数据。

图2 1D-CNN网络结构
1.3 加权融合
任意节点的测距信息都存在均值漂移、误差波动大等情况。从仿真模型角度解释为UWB信号模型呈簇状,单簇内部符合泊松分布,整体符合泊松过程,并且在人员干扰的情况下,引起更大的测距误差。此外,UWB在短距离的测距信息会明显小于真实距离,该特点对1DCNN而言,会使得训练效果下降,给远距离的数据处理带来偏差。而经过EWMA处理的测距信息仍然保留了原始数据的特征,在远距离处的精度较高,可以弥补1DCNN的不足,因此引入加权融合思想,根据多次测量数据设计相应的加权函数,采用了三次函数的形式进行加权系数的设计。

EWMA算法如下:
2005年,根据四川省内外家政市场的需要和四川省劳务开发创品牌、提质增效、再上新台阶的要求,四川省劳务开发领导小组决定在省立“千万农民工培训工程”项目中,首先打造“川妹子”家政服务员品牌。据不完全统计,在多年的发展过程中,省、市(州)、县(市、区)三级财政投入“川妹子”品牌家政服务员培训补助资金约7000万元(其中,省级财政投入3000万元),培训并投放市场的品牌“川妹子”家政服务员达10万人。“川妹子”家政服务员已成为全国知名地方性劳务品牌。

式中:vt为冷启动情况下EWMA的处理数据,通过式(5)来修正冷启动引起的前期数据偏差,得到dEWMA;β为加权下降的快慢,值越大下降越慢,一般取1>β≥0.9;d t为t时刻的实际测距信息。
1.4 UKF原理及流程
基于TOA技术的UWB定位系统中,定位方程是非线性的,根据UWB测距条件,建立方程:

UKF使用无迹变换来处理非线性问题,原理可归纳为,按某一规则在原状态分布中选取一些采样点,使这些采样点的均值和协方差等于原状态分布的均值和协方差,代入非线性方程中,得到相应的非线性函数值点集[14]。无迹变换具体步骤如下。
(1)计算2n+1个采样点,n表示状态维数:
(2)计算采样点的权值:
式中:λ为缩放比例参数;α为控制采样点分布;k为尺度参数。
UKF的实现过程如下。

(2)计算状态一步预测及协方差阵:

(4)量测更新,得到k时刻系统的状态更新及协方差更新:

2 定位算法实验测试
2.1 实验场景
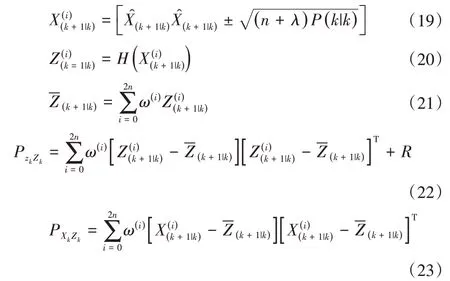
本次实验场景布置如图3所示,4个定位基站的坐标(单位:cm)分别为(0,0)、(603,0)、(603,800)、(0,800)。基站摆放水平位置与标签一致。为验证定位算法在非视距环境中的定位效果,在定位区域中增加4名人员进行运动干扰。本文中用于测试展现的为4个位置点,各12 000组数据。
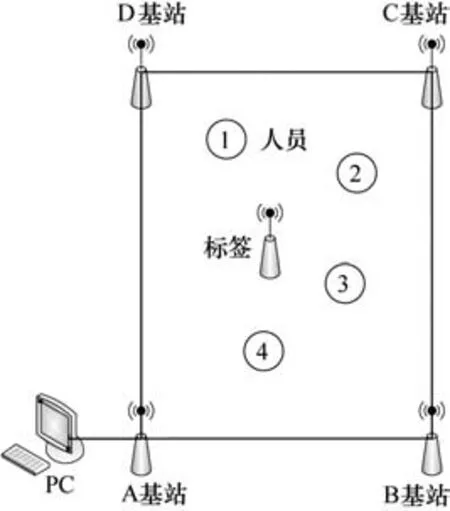
图3 基站平面定位示意图
2.2 实验结果与分析
表1所示为在NLOS环境下,不同定位算法的均方根误差(Root Mean Square Error,RMSE)。相比于单一的UKF定位算法,CNN-UKF、加权融合-UKF的RMSE平均误差分别降低了35.20%、46.79%。CNN-UKF的处理效果有了很大提升,但部分位置的RMSE低于单一UKF。从表中可以看出加权融合-UKF联合定位算法的精度更优,结合了CNN与原始数据的共同特点。当原始数据偏差较大时,加权融合会受到一定影响,造成RMSE略高,但整体在一个较低的水平。
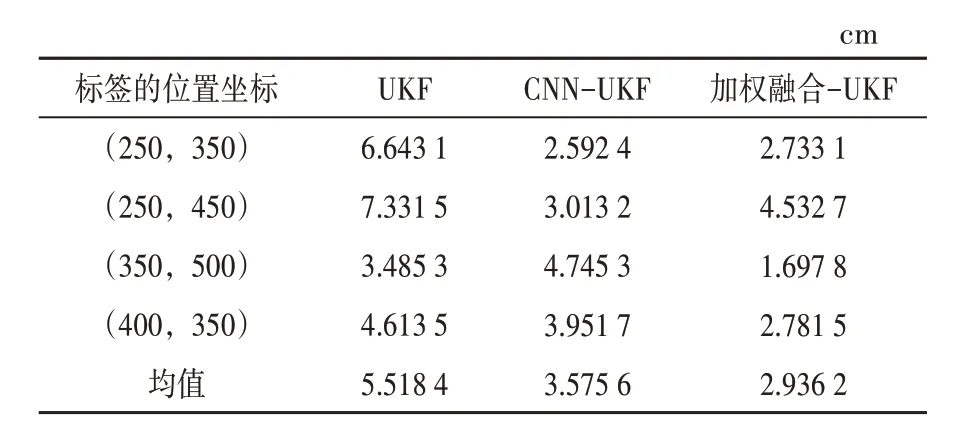
表1 不同定位算法RMSE对比
为评价算法效果,以A基站为参照,计算标签到A基站的测距真实值与算法估计值的误差。对标签定位在真实坐标(250,350)和(250,450)的采样数据进行解析。从图4~5中可以发现,原始测距误差约±15 cm,并存在特大误差,CNN处理的数据误差较稳定,且精度更高。加权融合的数据误差基本稳定在0值附近,当CNN误差较小时,加权融合的数据也较小,当其误差较大时,同样可以保持稳定。从整体上看,加权融合所得到的测距数据结果更符合实际使用要求。
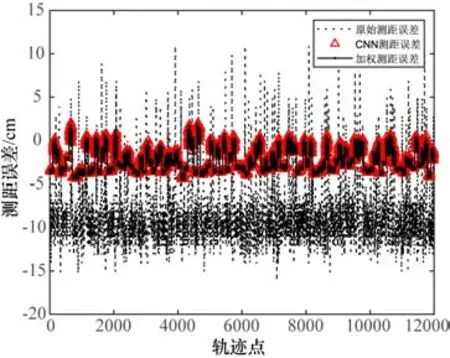
图4 标签(250,350)A基站测距误差

图5 标签(250,450)A基站测距误差
为进一步观察定位算法效果,求取标签位置坐标的真实值与算法估计值的误差。选取标签真实坐标(350,500),(400,350)采样数据分析。图6~7是UKF和加权融合-UKF的误差对比。在已知这两点RMSE较低的情况下,UKF解算仍存在较大的定位误差,从侧面可以看出NLOS对定位解算存在严重的干扰,而加权融合-UKF的解算结果波动较小,稳定性更高,没有出现特大误差,基本在RMSE的结果附近跳动。

图6 标签(350,500)定位误差

图7 标签(400,350)定位误差
3 结束语
在实际场景中,UWB信号会受到室内结构及行人影响,从而使得多径效应明显,造成巨大的定位误差,本文针对该现象,提出了一种基于加权融合-UKF的联合定位算法。充分利用CNN拟合优势,对原始数据进行降噪处理,根据结果显示1D-CNN对UWB的原始测距数据处理效果较好,同时通过指数移动平均保留原始数据的基本特征,为弥补CNN处理的缺陷,设计加权融合算法将两者进行统一,最终引入UKF对测距信号进行定位解算,提升定位整体精度的同时,也能够有效地抑制粗大误差,基本满足应用要求。考虑到算法参数数量问题,后续会将加权的参数统一放入一个框架,实现参数的自适应调整。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
物联网技术(2020年12期)2021-01-27
通信技术(2020年2期)2020-03-26
科学(2020年3期)2020-01-06
恋爱婚姻家庭·青春(2019年9期)2019-12-10
汽车零部件(2017年4期)2017-07-12
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05
探索科学(2017年4期)2017-05-04
教学月刊·中学版(教学参考)(2016年5期)2016-06-14
