
基于AHP-熵权TOPSIS 法的轻载机械臂示教系统交互质量评价方法
2022-08-26 03:03张家奇
机电产品开发与创新 2022年4期
蒋 浩, 宁 芳, 张家奇
(中国矿业大学 建筑与设计学院, 江苏 徐州 221000)
0 引言
近年来随着国内外对机械臂相关技术的研究,机械臂的示教器也出现了新兴的形式,如无线示教取消了笨重的手持示教器和冗长控制器, 将示教器的功能集中于一个轻巧的移动端应用中,只要下载相应软件,并与机器人处于同一局域网下便可操控机械臂。 机械臂系统中示教系统界面的好坏对用户操控机械臂有着直接影响,因此搭建出功能完善、 界面友好、 操控方便的示教系统界面,是机械臂研究中重要的一环。
1 背景研究
1.1 国内外研究现状
对于负载在10kg 以下的机械臂,轻载机械臂示教系统是指用户对此类机械臂进行手动操纵、程序编写、参数配置以及监控等操作的网页界面。 近年来随着机械臂的智能化、网络化发展,不少厂商纷纷开发出示教系统的移动端和网页端版本来满足不同系统用户的需要。 如Syed Mohsin Abbas[1]提出了一种基于AR(Augmented Reality)技术的智能手机示教的想法,将AR 技术融入到智能手机的示教过程中, 将帮助用户更直观地对工业机器人进行编程。田国富[2]基于WinCE 6.0 嵌入式实时操作系统和设计了一种界面友好、操作简单的机器人示教器人机界面。
从研究内容上看, 国内外学者对于轻载机械臂示教系统的研究相对较少,成果数量较少。 在机械臂示教系统的研究上, 国内外学者都认为示教器移的移动化是发展趋势,而国内学者往往是从技术和软件程序开发的角度提出示教界面的设计策略,对人机交互和用户体验的考量较少。
1.2 层次分析法
层次分析法即AHP 法,是一种将定性分析与定量研究相结合,并对复杂问题做出决策的主观赋权法。AHP 法在评判决策的过程中体现出极强的条理性和逻辑性,因而被广泛应用于与决策有关的各种领域中[3]。 但AHP 法在赋权过程中带有一定的主观成分, 因此本文会加入一个客观的数赋权方法来对主观赋权过程进行修正。
1.3 熵权法
熵权法是指根据各项指标观测值所提供信息量的大小确定指标权重的客观赋权法, 普遍应用于社会经济和工程技术领域[4]。熵权法由于客观性强可以和其他主观赋权法结合,进行综合赋权评价。
1.4 逼近理想解排序法
逼近理想解排序法即TOPSIS 法[5],是一种依据各个方案与理想化目标的接近程度来进行方案排序的方法,即在已有的数个方案中进行相对优劣的排序。 TOPSIS 法常被用于解决各领域中方案优选和比较的问题。
2 基于AHP-熵权TOPSIS 的轻载机械臂示教系统交互质量评价流程
通过对AHP、 熵权法和TOPSIS 进行的文献研究分析,提出了以一种基于AHP-熵权TOPSIS 的轻载机械臂示教系统的交互质量评价方法, 可以降低层析分析法中的主观成分, 较为客观地对轻载机械臂示教系统交互质量进行评价,其研究方法架构见图1。
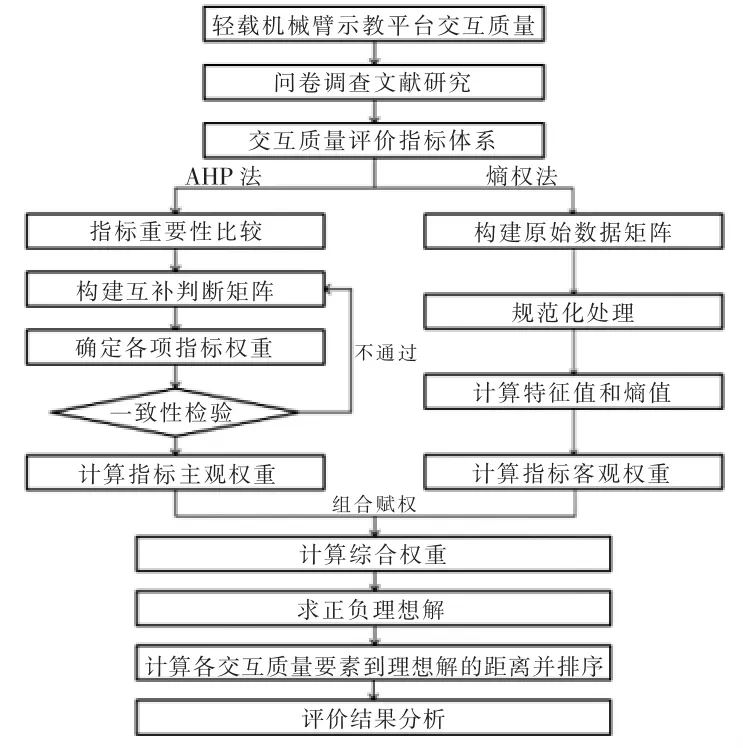
图1 基于AHP-熵权TOPSIS 的研究方法架构
2.1 确定评价指标体系
通过用户访谈和问卷调查对用户需求进行挖掘,并结合文献研究将整理后的用户需求作为轻载机械臂示教系统交互质量评价指标。 梳理轻载机械臂示教系统的功能模块确定了AHP 中准则层的要素:界面显示,运动控制,语言编程,状态监控。 再将准则层详细拆解为子准则层, 提出姿信息显示R1,3D 仿真显示R2, 点动操作简易R3,点位示教引导R4编程指令易懂R5,文件编辑防丢失R6,实时状态反馈R7、警报方式多样R8和故障处理图示化R9九种要素。 至此,基于层次分析法的原理构建出轻载机械臂示教系统交互质量评价体系,见图2。
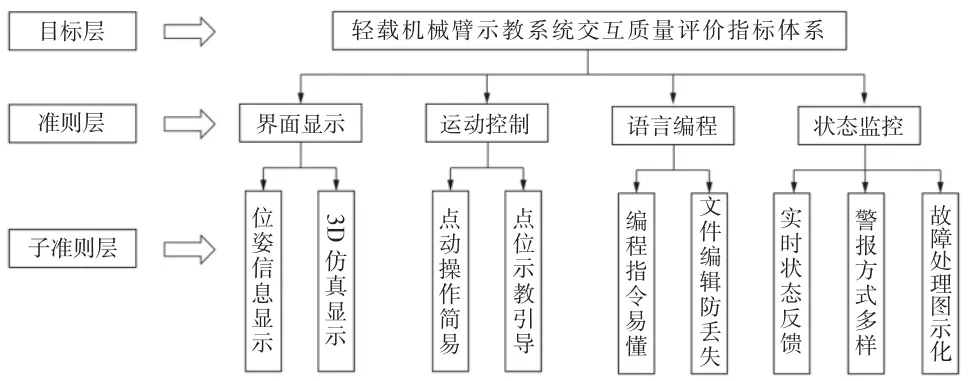
图2 轻载机械臂示教系统交互质量评价指标体系
2.2 确定TOPSIS 的评价对象
依据亲和图法对老年用户需求进行分类整理后,转化为符合设计流程的设计要素, 以此更好地满足用户的需求,结果见图3。 通过上述方法,从众多的用户访谈信息中,得到了4 个层面的9 个用户需求。并且从这9 个用户需求中映射得到了5 个交互设计要素,并作为TOPSIS的评价对象,分别是信息可视和反馈X1、操作逻辑X2、过程引导X3、用户容错X4和页面布局X5。

图3 用户需求和交互设计要素对照表
2.3 使用AHP 确定评价指标权重
使用AHP 法进行评价指标权重的确定主要包括三个步骤:构造初始评价矩阵、确定各指标的权重和一致性检验。
(1)建立判对矩阵A=(aij)(p×p),其中ai表示评价指标,且ai∈A(i=1,2,3,…,p),ai表示第j 个指标相对第i 个指标的相对重要程度,且(j=1,2,3,…,p)。 邀请数位专家对各项评价指标采用1-9 的评价标度进行重要性的比较并进行评分,得到判断矩阵A。

2.4 使用熵权法确定评价指标权重
使用熵权法确定评价指标客观权重主要包括三个步骤:构建原始数据矩阵、标准化决策矩阵、计算熵值和评价指标的客观权重。
(1)通过定量问卷调查,构建交互设计要素和交互质量评价指标的原始数据矩阵Y。
(2)将原始数据矩阵Y 进行标准化处理。 设决策问题备选方案合集为Y=Yi={Y1,Y2,…,Yn},方案的评价指标集为Y=Yij={Yi1,Yi2, …,Yim},Yij表示原始矩阵中第i 个交互设计要素第j 个交互质量评价指标,将其标准化处理后的值记为Yij′,其中i=1,2,…,n;j=1,2,…,m。
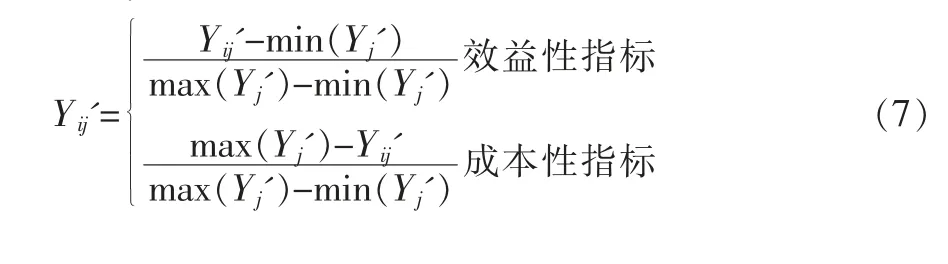
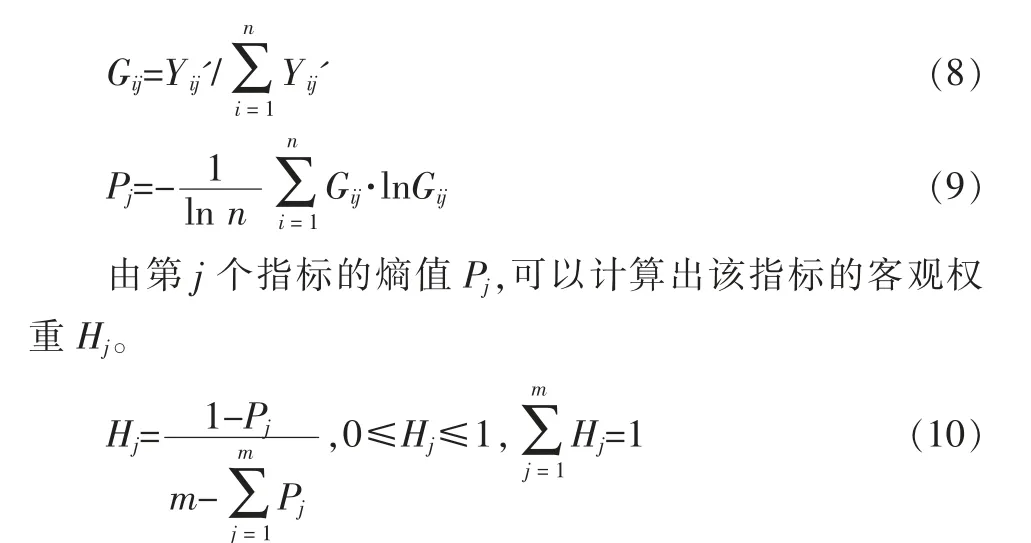
(3)计算标准化矩阵Yij′ 各个评价指标比重Gij,再计算各个指标的熵值Pj,在式(7)中ln 表示自然对数,n 表示交互设计要素的数量。
2.5 确定综合权重
将AHP 和熵权法求得的权重进行组合赋权, 得到各项评价指标的综合权重值Wj′。

2.6 TOPSIS 求贴合度
(1)利用公式(12)对评价指标和交互设计要素的原始数据进行规范化处理,规范化后处理的值为Zij,其中i=1,2,…,n;j=1,2,…,m。将AHP 和熵权法确定的综合权重与规范化矩阵Z 中的值Zij相乘, 从而得到加权规范化矩阵 到Zij′=Wj′·Zij

3 基于AHP-熵权TOPSIS 的轻载机械臂示教系统交互质量评价应用
3.1 使用AHP 确定评价指标权重
通过专家评审打分,从界面显示、运动控制、语言编程和状态监控四个层面出发, 得到第一层的判断矩阵如下表所示。 经过计算由式(4)和式(5)得到λmax=4.1145,CI=0.0382,查表可知CI=0.89,由式(6)计算一致性比率CR=0.0429<0.1 可知满足一致性要求。由第一层的权重向量[0.1256,0.5272,0.2690,0.0782]可知在轻载机械臂示教系统的交互设计中,优先考虑的顺序依次为界面显示,运动控制,语言编程和状态监控。
同理可以确定界面显示层指标R1和R2的相对权重为[0.8065,0.1935],最终权重为[0.1013,0.0243]。 运动控制层指标R3和R4的相对权重为[0.3333,0.6667],最终权重为[0.1757,0.3515]。 语言编程层相对权重为[0.8065,0.1935],最终权重为[0.2169,0.0521]。 状态监控层指标R7、R8和R9的相对权重为[0.5441,0.1262,0.3297],最终权重为 [0.0425,0.0099,0.0258], 计 算 得 到λmax=3.0205,CI=0.0102,由一致性比率CR=0.0115<0.1 可知满足一致性要求。
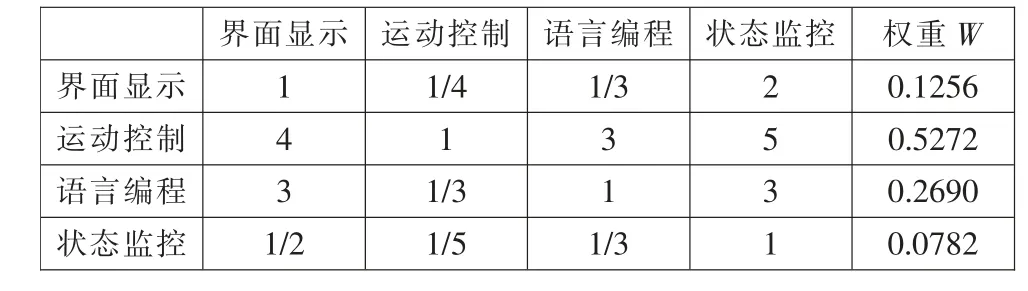
表1 交互质量评价表准则层原始矩阵和权重表

表2 界面显示指标层原始矩阵和权重表

表3 运动控制指标层原始矩阵和权重表

表4 语言编程指标层原始矩阵和权重表

表5 状态监控指标层原始矩阵和权重表
综合以上,整理出各个评价指标的最终权重见表6。

表6 评价指标主观权重

表7 原始数据矩阵Y
3.2 使用熵权法确定评价指标权重
定量数据主要采用李克特七级量表问卷调查的形式获取,一共发送38 份问卷,有效问卷36 份,之后整理问卷结果得到原始数据,数据计算方法为:去掉该项指标的最高值和最低值后,在计算该指标数据的平均值,得到原始数据矩阵Y。
首先根据式(7)进行规范化处理得到标准决策矩阵,再利用式(8)计算出每个评价指标比重Gij,再通过式(9)、式(10)计算出指标的熵值Pj和客观权重Hj,见表8。

表8 评价指标熵值和客观权重
3.3 确定综合权重
将AHP 求得主观权重和熵权法求得客观权重结合,由式(11)可得综合权重Wj′。

表9 评价指标综合权重
3.4 求解贴近程度并排序
在得到了各个指标的综合权重后, 就可以计算交互设计要素和交互质量评价体系的贴近程度了。 依据式(12)对表7 的原始数据进行规范化处理,并和指标权重相乘,得到加权规范化矩阵Zij′见表10。
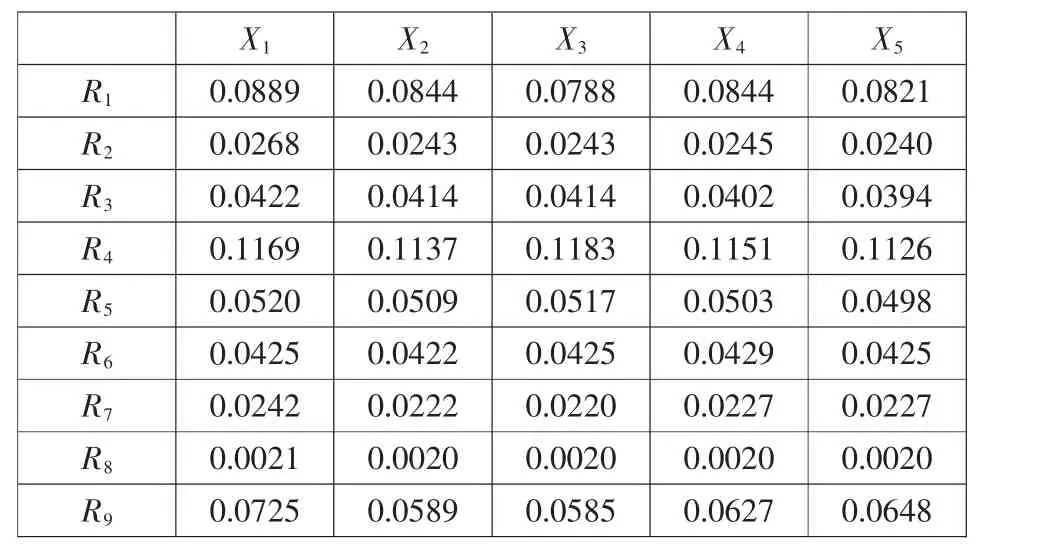
表10 加权规范化矩阵Zij'
根据表10 的数据和公式(13)确定交互质量评价指标的正、负理想解集Z+、Z-,Z+={0.0889,0.0268,0.0422,0.1183,0.0520,0.0429 ,0.0242,0.0021,0.0725},Z-={0.0788,0.0240,0.0394,0.1126,0.0498,0.0422,0.0220,0.0020,0.0585}, 之后将得到的正负理想集Z+和Z-带入到式(13)中,计算出评价对象和评价指标正负理想解的欧氏距离Di+,Di-, 最后确定相对贴进度得到交互设计要素的排序。
由表11 可直观看到X1>X4>X5>X2>X3,X1信息可视和反馈与交互质量评价指标的贴近程度最高;X4用户容错和X5页面布局处于中间位置;X2操作逻辑和X3过程引导与交互质量评价指标的贴进度最小。由此可见,X1信息可视和反馈对于交互质量的好坏具有显著影响,X4用户容错和X5页面布局对交互质量影响稍弱,X2操作逻辑和X3过程引导对交互质量影响不大。
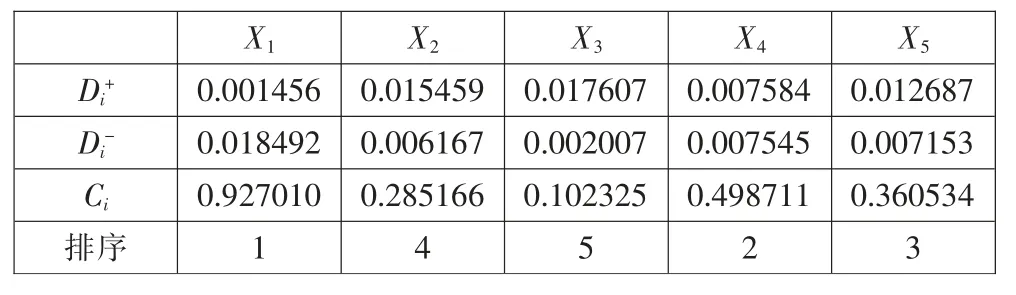
表11 欧氏距离和贴进度数值表
因此,在设计轻载机械臂示教系统的过程中,根据研究中的决策结果,需要重点关注信息可视和反馈、用户容错和页面布局, 将有限资源集中在这三项交互设计要素的实现中,以便获得交互质量更好的示教系统。
4 结束语
本研究采用AHP、熵权法和TOPSIS 法相结合的方法构建了轻载机械臂示教系统的交互质量评体系并确定了指标权重,降低了设计评价过程中主观因素的影响,保证了评价结果的可靠性和准确性。 首先根据文献研究和用户调研,构建了交互质量评价指标体系,并将用户需求映射成交互设计要素确定评价对象; 利用层次分析法和熵权法进行组合赋权和加权计算, 降低了赋权过程中的主观成分,并确定了各项评价指标的综合权重;运用TOPSIS 计算出各项交互设计要素与评价指标的贴进度,获得对交互质量有着较大影响的交互设计要素。
基于AHP-熵权TOPSIS 的轻载机械臂示教系统交互质量评价模型可以帮助专业人员进行合理的决策, 优化工作人员的示教操作,为实践训练和相关设计提供参考。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
选煤技术(2022年2期)2022-06-06
中国西部(2022年2期)2022-05-23
心理学报(2022年5期)2022-05-16
民族文汇(2022年9期)2022-04-13
客联(2021年3期)2021-09-10
南大法学(2021年6期)2021-04-19
当代陕西(2020年17期)2020-10-28
活力(2019年15期)2019-09-25
人大建设(2018年5期)2018-08-16
