驱动式多功能助老爬楼机设计
2022-08-26 03:03:46陈运胜
机电产品开发与创新 2022年4期
陈运胜, 李 映
(广州华立科技职业学院, 广东 广州511325)
0 引言
据全国老龄办的研究报告显示, 当前我国已经进入快速老龄化阶段,老年人全球人口总数的20%,已经是世界上老年人口最多的国家。 伴随人口老龄化过程最为显著的特征就是行动能力下降, 这是身体各方面机能衰退不可避免而造成的。 根据老年人口数量预测的增长趋势[1],预计在2025 年左右,我国60 岁及以上人口数量将是一个十分庞大的群体,人口规模会超过3 亿。 随着人口老龄化的增长,助老爬楼设备也在不断地发展更新,呈现出了新特点, 关注老年人生活方式成为近年来民生讨论热门, 而老年人一般身体行走能力不便且独自在家无人照顾,上下楼梯比较困难。 目前,老人上下楼梯的主要方式包括厢式电梯、站立式简易楼道电梯,座椅电梯、爬楼机等。
厢式电梯,运行速度快且可多人乘坐。 但是要想在原本未安装电梯的居民楼安装电梯不是一件简单的事。 首先六层以下的楼房安装电梯的成本高,电梯安装率不高。其次,除了安装费用和维护成本比较高之外,手续繁杂琐碎且需要各楼层业主的意见,在实际操作中,常常又因为各种原因(如:采光、噪声和费用分摊等)很难达成一致。
站立式简易楼道电梯,结构相对简单,相对于厢式电梯安装成本低,不占空间,使用起来也相当简便。 但是站立式简易楼道电梯要求人踩在踏板上沿着轨道上下楼,可对于年纪大,思路不太清晰,重心不稳的老年人来说,站立式简易楼道电梯还是存在一定风险的。 另外,此类电梯不适用于不方便站立的老年人。
座椅电梯,是一种在楼梯侧面运行的电梯,用来帮助行动不方便的人上下楼梯。 老年使用者可坐在椅子上,沿着轨道轻松上下楼。 相对来说,座椅电梯安装相对厢式电梯安装费用较低; 相对站立式简易楼道电梯更适合腿脚不便的老年人,且安全性较高。
但是,厢式电梯、站立式简易楼道电梯、座椅电梯这3种方式都要求在使用场景预先安装好设备, 对于在某些没有安装好助老助残爬楼设备的楼道就是一个难题。 爬楼机则在这类使用场景中具有较大的优势。
目前市面上的助老爬楼机结构复杂、安装难度大、维修机率大、安全性能低、成本高降低了社会利用率、操作过于复杂、实用价值低、功能单一、设计不合理、体型笨重庞大等问题有时无法进行工作。 目前, 随着人们的出行次数的增多,在各个商场、酒店等等地方,楼梯的设置必不可少,因此爬楼则无法避免。对于年轻人来说,上下往复爬楼并无太多的影响,但是对于腿脚不便的老年人而言,爬楼则相当的困难,为此,辅助老年人爬楼的设备则成为了市场的需求。
1 助老爬楼机研究现状
在国外的一些主要发达国家对助老爬楼机器人的研究设计水平走在世界的前沿,如美国、日本、德国等发达国家。 研究设计人员利用多种理论知识与实物结构相结合, 研究设计出形式多样的助老爬楼机器人或者爬楼设备,他们研究的产品相对成熟,且大部分已经投入市场进行使用[2-4]。 比如日本早稻田大学高西淳夫教授团队研究设计了能用于爬楼的步行机器人, 长崎大学机械工程系研究的一种高阶爬楼梯装置, 这种爬楼梯的设备装置是由行星轮和连杆机构两部分构成, 装置前后设计两组行星轮, 运动时整个装置是通过行星轮和连杆机构共同作用来完成爬楼梯动作的, 爬楼装置通过陀螺仪能感知倾角, 整个装置的平衡是靠座椅下面的液压杆可自动调节来实现的。这样的设计不仅能爬比较高的楼梯,在平地运行时液压杆折叠到爬楼轮椅装置的最底部, 大量的运行空间就这样节约了。 它的最大优点就是体现在可以爬很高楼梯,甚至它可以很轻松地从地面跨上一辆小货车[5-6]。我国对能够攀爬楼梯的装置或机器人研究起步较晚,目前虽然也有很多爬楼机器人方面的相关发明专利, 但是只有很少部分投入市场使用。 对这类爬楼机的研究设计主要来自于一些国内大学, 比如河北工业大学研制设计的两足并联腿步行机器人, 上海交通大学研制设计的两足步行椅机器人, 还有燕山大学研制设计的步行机器等等,一般处于实验室阶段,市场投入应用极少[7]。
2 爬楼机的分类与分析
综合国内外研究现状, 爬楼机主要分为载物爬楼机和载人爬楼机。
载物爬楼机有支腿式爬楼机的执行结构, 适合用于载重低于250kg,操作灵活体验好,速度快。执行起来类似于推臂式爬楼机,两个支腿向下支撑在本级台阶上,然后将整个车体和货物抬升到高一级台阶。 最好是有经验的人进行操作。还有一种执行机构是履带式的,其结构类似于坦克的履带。 履带比较长, 可以同时覆盖2 个台阶以上,依靠两条履带的滚动实现爬楼机的移动,从而实现进行上下楼梯的移动。 一般履带式爬楼机适用于载重在250kg 以上的货物。
目前载人爬楼机基本可以分为以下四种类型: 步行式机构载人爬楼机、履带式机构载人爬楼机、轮组式机构载人爬楼机、步进支撑式机构载人爬楼机。分别对国内外载人爬楼机研究情况进行分析如下:
步行式机构载人爬楼机主要由机械连杆机构组成,其运动原理是模仿人类爬楼梯时候的动作。 装置在运动的时候是依次一只脚抬高以及台阶然后向前水平移动,平稳着地后再换另一只脚, 如此重复动作完成整个爬楼梯的过程。 对步行式机构爬楼机的研究方向主要是步行机器人。 例如: 日本长崎大学研究的一种高阶爬楼梯装置,还有上海交通大学研制的双足步行椅机器人,河北工业大学研究的双足并联腿步行机器人。
步行式机构载人爬楼机有很多优点:一是爬楼运动相对平稳; 二是能够自适应多种不同高度不同样式的楼梯。当然,步行式机构爬楼机还有很多不足的地方:首先要自适应多种不同高度不同样式的楼梯,就对控制系统要求较高。其次这个动作相对比较缓慢,爬楼周期较长。在运动过程中,整体重心是偏上的,容易出现侧倾。这些不足之处也使得目前使用步行式机构载人爬楼机的人较少。
履带式机构载人爬楼机, 其结构与履带式机构载物爬楼机类似。大多属于电动驱动的爬楼机。结构相对比较简单,工作原理是电动机带动履带轮转动,从而实现履带在转动,较长的履带与楼梯接触实现爬楼。 日本长崎大学设计了一款名为“Sakadakun”的双履带电动爬楼机,可以进行角度调整。 英国一公司开发了履带式爬楼机“Baronmead”,其特点是运动速度比较快,大约3s 能完成一个台阶。 中国也有很多学者设计者研究履带式爬楼机,并且申请了专利。
轮组式机构载人爬楼机, 主要由行星轮和行星支架组成。各小轮可以绕着各自的中心转动,也可以绕着行星支架的中心转动。轮组式机构载人爬楼机在爬楼梯时,小轮绕着大轮公转。 在平地运动时,小轮可以进行自转。 轮组式机构载人爬楼机适合爬楼梯, 也适合转为平地平稳地行走。 但是,轮组式机构载人爬楼机的结构相对比较笨重,且占用空间较大,影响其应用范围。丰田推出可攀爬楼梯的iBot 机械轮椅,但是其昂贵的造价,让很多普通家庭望而却步。
步进支撑式机构载人爬楼机, 是在普通轮椅上加装的实现爬楼梯动作的辅助设备。这样可以降低生产成本,也方便携带,在爬楼梯行业中受到广泛的应用。
3 驱动式多功能助老爬楼机结构组成及特点
综合分析目前爬楼机的优缺点: 有些安全性高的助老爬楼机,结构相对比较复杂,生产成本随之较高,而有些助老爬楼设备结构单一, 在升降爬楼过程中尤其是登上或是登下升降台时,安全性低,容易跌倒等问题。 在研究各类爬楼机结构特点以及适用场合的前提下, 本课题研究设计了一种驱动式多功能助老爬楼机[8]。
图1 是一种驱动式多功能助老爬楼机, 主要部件包括支撑架、电机、线辊、拉绳、定滑轮、侧支架、横架、升降台、滑座、横杆、靠背板、开口、扶手杆、电磁铁、旋转台、固定杆、环形槽、控制器等。支撑架平行安装于楼道上,支撑架上设置升降台, 升降台可经由驱动模块的控制沿支撑架的长度方向升降滑动, 升降台的上端设置环形的靠背板,靠背板的一侧设置开口,开口内铰接扶手杆,扶手杆的自由端与开口的另一端通过电磁铁磁吸固定, 电磁铁与驱动模块电连接,升降台内设置电控的旋转台,旋转台上设置固定杆, 升降台上对应固定杆的位置设置相配合的环形槽,环形槽与靠背板上下对应,固定杆穿出环形槽与靠背板连接固定。
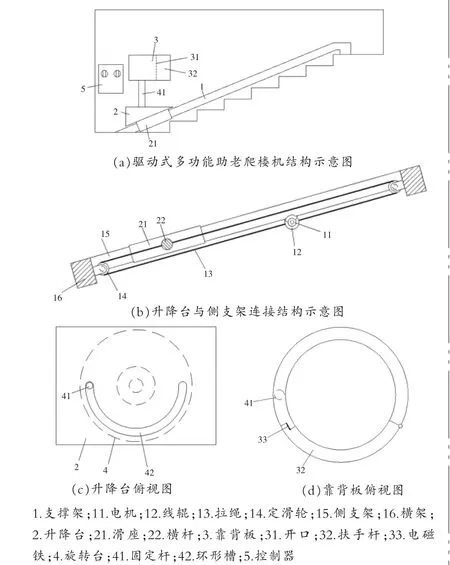
图1 驱动式多功能助老爬楼机结构图
驱动模块由控制器构成,控制器与电磁铁电连接,支撑架上设置电机,电机与控制器电连接,电机上驱动连接线辊,线辊上绕设有拉绳,支撑架的两端设置定滑轮,拉绳的两自由端绕过对应一侧的定滑轮连接于升降台上,通过电机驱动控制线辊的正反转, 使得线辊上的拉绳的两端呈一收一放又或是一放一收的状态, 进而在拉绳的拉动下,控制拉动连接的升降台沿支撑架上下滑动,实现升降位置的移动调节。 并且, 控制器由于电磁铁电连控制,进而使用电磁铁的通断电与电机的启停相互同步,因此,在电机启动时,电磁铁通电,使得扶手杆磁吸固定,避免其误打开,而在升降位置移动到达相应位置后,电机停止,电磁铁断电,扶手杆打开,老人可从开口处实现于升降台上的登上或是登下。
支撑架包括一对侧支架,侧支架通过横架连接,滑座通过横杆连接固定,拉绳的两自由端连接于横杆的两侧。升降台的侧截面呈直三角形状,顶表面呈水平状。升降台上设置滑座,滑座滑动连接于侧支架上。
4 工作原理
在上升时的登楼时,先控制旋转台的转动180°,使得靠背板的开口一侧转动至老人的正面, 进而将扶手杆转动打开,可使得老人直接登上升降台。然后将扶手杆转动复位,并控制旋转台的转动,使得开口一侧转动至与老人同朝向的位置。然后通过控制器控制电机的启动,带动控制升降台的爬楼。而此时电磁铁通电,在扶手杆的自由端磁吸固定于开口的另一侧, 以保证老人安全的站立于升降台内。同时,扶手杆也可方便老人的搀扶。相应的,在登上高层后,控制器控制电机关闭,同时电磁铁断电,老人将扶手杆推动打开,即可直接走下升降台。
5 结束语
这种驱动式多功能助老爬楼机能够根据满足不同老人身形的需求, 对老人站立在升降台时的升降爬楼过程中,实现较好的支撑防护,以保证其在升降移动过程中的安全性。易于老人快捷方便登上或是登下升降台,且爬楼过程中,安全性高。 同时,老年人也可根据自身选择手动前进、后退档位进行运动爬楼,或选择自动档进行电动完成驱动。 驱动式多功能助老爬楼机结构简单、 造价成本低、安全系数高、操作简单、适用范围广。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
装备制造技术(2021年1期)2021-05-21 07:54:54
装备制造技术(2020年9期)2021-01-26 00:15:28
演艺科技(2020年5期)2020-07-15 09:05:56
技术与市场(2020年3期)2020-03-26 05:41:52
中国民政(2019年12期)2020-01-02 09:12:08
今日农业(2019年16期)2019-09-10 08:01:54
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33