
航天器降落伞回收系统典型故障案例浅析
2022-08-26 06:43黄伟
载人航天 2022年4期
黄 伟
(1.北京空间机电研究所,北京 100094;2.中国航天科技集团有限公司航天进入减速与着陆技术实验室,北京 100094)
1 引言
对于进入/返回式航天器而言,由于降落伞具备减速效率高、占用空间小、重量轻等优点,因此航天器进入被大气所包围的星体时,采用降落伞进行气动减速,保证其在星体表面安全着陆是最为广泛的技术手段。降落伞回收系统是否正常工作直接影响航天器安全着陆,对整个航天器飞行任务的成败起到决定性作用。在航天器减速下降过程中,降落伞回收系统的工作过程是不可逆的,即使如载人飞船设置有备份降落伞,在由主份切换到备份的过程中,飞船返回舱的高度也一直下降,即安全救生高度一直在损失中。因此,降落伞回收系统的可靠性至关重要。
在全球航天技术发展历程中,出现过一些降落伞回收系统的故障问题,轻则影响工程进度,带来一定成本损失,重则导致航天器回收失败,甚至航天员牺牲,代价巨大。对航天器降落伞回收系统的故障问题进行系统研究,有利于提升航天器降落伞回收系统可靠性设计和风险控制水平。本文对此进行初步探讨,结合航天器降落伞回收系统的主要工作环节,对国内外航天器降落伞回收系统出现过的一些典型故障问题进行梳理归纳,旨在对航天器降落伞回收系统的设计和风险控制提供有益参考。
2 典型工作环节
根据航天器不同的功能特点、工作条件、指标要求、设计约束等因素,采取的降落伞回收系统方案也多种多样,但一般而言,降落伞回收系统主要由降落伞、结构机构、回收控制、火工装置等组成,共同实现降落伞安装、开伞控制、弹射、拉直、充气、稳定减速等一系列功能,其中降落伞需根据任务需求选择合适的伞型、数量、收口状态设置等技术状态或技术参数。本文将航天器降落伞回收系统的典型工作环节归纳为表1所示的11项。
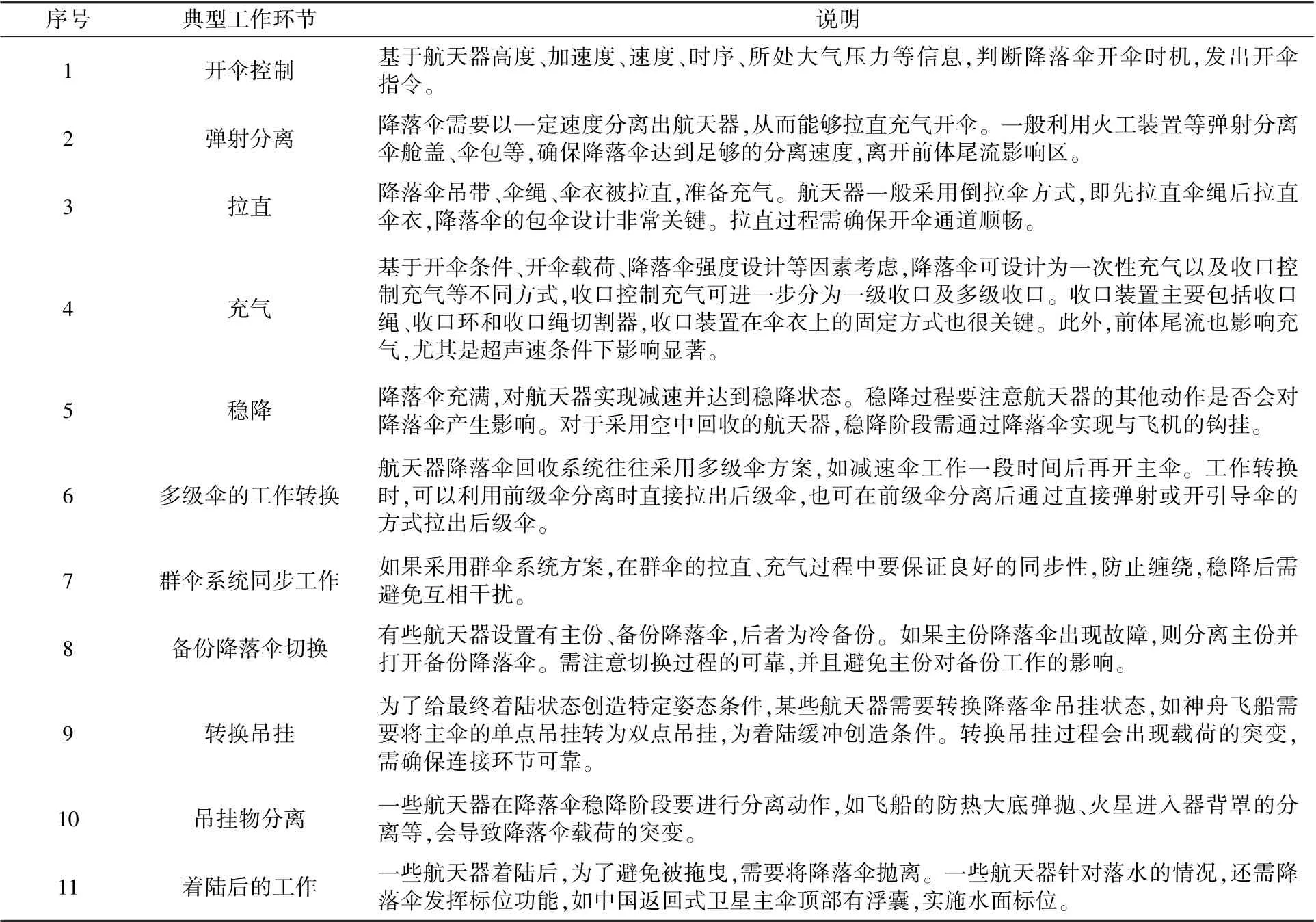
表1 航天器降落伞回收系统典型工作环节Table 1 Typical phases of spacecraft parachute recovery system
3 典型故障案例分析
3.1 开伞控制故障
在降落伞回收系统方案设计中,需要根据航天器的进入/返回弹道特点,选择合理可行的开伞控制方法。目前常用的开伞控制方法主要包括纯时序控制、过载时间控制、压力高度控制、雷达高度控制、基于速度或动压的自适应开伞控制等。开伞控制用于判断开伞时机,是降落伞工作的前提,必须确保安全可靠。
开伞控制故障主要涉及到相应的控制器或者敏感器。例如,美国于2001年1月7日发射的起源号探测器,于2004年9月8日携带采集样本的返回舱在进入地球大气的过程中降落伞没有打开,返回舱硬着陆损坏。起源号返回舱采用过载时间的开伞控制方案,事故调查组经过一系列的检查和故障分析,最终得出的结论是过载开关设计、安装错误,反向180°,见图1所示。这个错误应属较低层次的问题,除了设计中对加速度朝向的设定反向外,测试不充分,过程管控不到位也是重要因素。
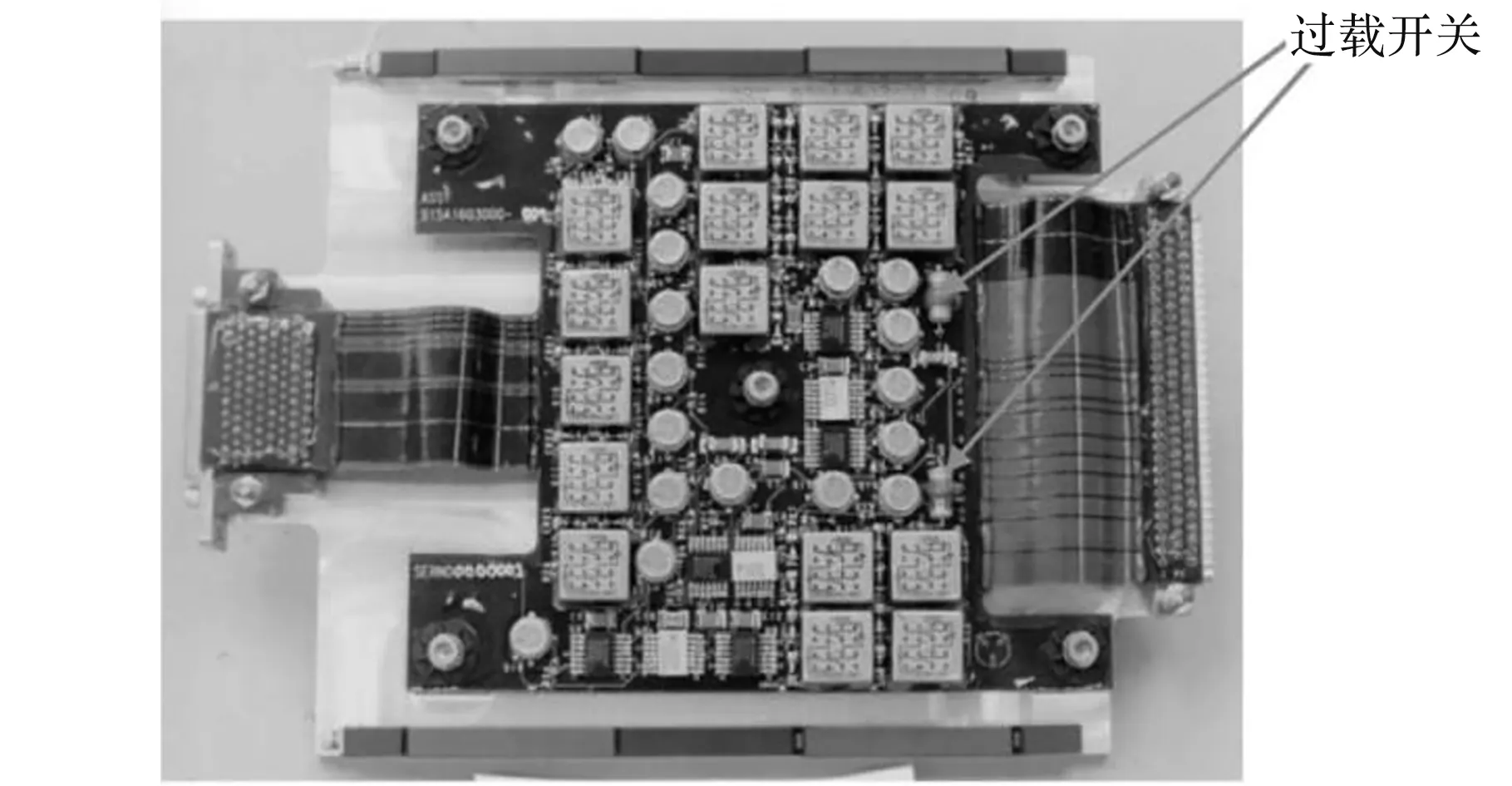
图1 起源号过载开关方向错误[1]Fig.1 G-switch of Genesis was designed and placed in wrong direction[1]
3.2 弹射分离故障
航天器降落伞回收系统的第一级降落伞一般都是采用弹射器、弹伞筒等火工装置实现弹射分离,使降落伞伞包迅速离开航天器,并为降落伞的拉直创造条件,减轻绳帆现象的影响,避免尾流影响甚至被负压作用而无法正常分离。其对应的典型故障一方面是火工装置产品未正常工作,另一方面是弹射分离速度达不到安全开伞的需要。因此,除了确保相关产品安全可靠外,这个工作环节最为关注的是确定并实现足够的弹射分离速度。
3.3 拉直故障
弹射后,降落伞的吊带、伞绳、伞衣依次从伞包中拉出,直到拉直状态,从而为充气创造条件。降落伞拉直过程正常与否与包伞设计密切相关,必须保证降落伞有序逐步拉出。拉直过程必须确保开伞通道顺畅,如果拉直过程中伞包与前体结构碰撞或钩挂,会带来非常不利的影响。
例如,1982年3月22日发射的第3架航天飞机STS-3,在其2个固体火箭助推器回收时,右侧助推器的1个主伞失效,本应是3个主伞形成的群伞变成了只有2个主伞作用,导致助推器降落速度过大,损坏严重。经故障调查和分析,导致1个主伞失效的主要原因是主伞的拉直环节不合理。助推器采用减速伞分离同时拉出主伞包的方案,而减速伞是通过助推器分离的截椎体舱段来拉动主伞包。主伞包拉直过程中截椎体并非理想的稳定姿态,而是存在较大的摆动角,从而会与主伞包发生碰撞,导致主伞包出现了局部损伤。主伞拉直过程因而不够平顺,并促使群伞间顶部附加的漂浮装置发生缠绕,进而导致故障伞顶孔绳受力不均而断裂,断裂的顶孔绳抽打到顶孔带,导致其损坏并继而扩展到一系列水平带破坏。2019年欧空局EXOMARS探测器降落伞高空开伞试验先后2次都出现了故障。其减速伞、主伞均发生了伞衣充气张满前破损的情况,根据其降落伞系统方案,可以初步判断故障大概率发生在降落伞拉直环节。以上故障的出现,除了降落伞拉直环节的设计考虑不够充分外,与对拉直过程高速动态响应导致的姿态变化、多体碰撞、摩擦问题的仿真分析难以精确量化有关。
3.4 充气故障
充气过程是降落伞最为关键的环节,也是降落伞工作过程中最为复杂的阶段。充气过程降落伞的载荷、气动特性急剧变化,涉及到高速柔性大变形结构在非定常流场下的动力学问题,对于一般采用倒拉法开伞的航天器,降落伞的最大载荷往往发生在充气张满时刻。因此,降落伞的充气是容易出现故障的环节,主要包括降落伞收口控制故障、降落伞充气破损故障等。
例如,美国阿波罗飞船降落伞回收系统在研制过程的各类试验中先后出过不少问题,其中比较严重的一次是在空投试验中,1个主伞在解除收口的充气过程中损坏,其原因是伞衣强度不足,后续对降落伞结构进行了设计加强,从而使该问题得以解决。美国航天飞机进行助推器降落伞回收系统空投试验时,出现过减速伞充气损坏的故障,原因是收口绳固定带被拉脱,收口绳通过4个切割器固定,导致收口状态过充,收口绳被拉断,继而伞衣过早充气到第二级收口状态,降落伞伞衣破损。美国猎户座飞船研制初期,在降落伞系统空投试验中,先后发生收口绳切割器由于安装角度问题导致启动故障、收口环固定故障、收口环挤压损伤、伞绳损伤等多种问题,大部分都发生在降落伞充气过程,尤其是收口控制问题较为突出。
2004年,NASA针对后续火星探测大面积亚声速降落伞(直径为33.4 m环帆伞)开展了3次高空气球投放试验。第一次试验降落伞未能正常充气到收口状态,解除收口后,伞衣充气损坏。经分析,故障原因是伞衣牵顶绳未正常拉直即损坏,引起顶部反弹,导致充气时伞衣缠绕。采取改进措施后,第二次试验降落伞依然出现充气过程缠绕并导致解除收口后开伞载荷较大,从而伞衣破损的故障。经分析,故障原因是伞衣牵顶绳虽正常拉直,但强度依然不够而导致损坏。最后一次高空投放试验,降落伞出现收口控制失效的问题,2个收口环和1个收口绳切割器被异常拉脱,幸运的是伞衣强度设计余量较大,从而未出现明显破损。
2014年,NASA低密度超声速减速器项目开展了系统级的高空投放试验。试验模型首先展开超声速充气式减速器,之后弹射出气球伞作为引导伞,并拉出大面积火星超声速降落伞,该伞是一种新型的结合常规环帆伞和盘缝带伞特征的盘帆伞,名义直径为30.5 m。试验中充气式减速器和气球伞均正常工作,但盘帆伞工作故障,在充气阶段伞衣破损严重,如图2所示。经分析,故障是因为该新型盘帆伞的结构构型设计不合理,初始充气时伞衣“盘”部分的局部应力超出了材料强度,从而发生破损。
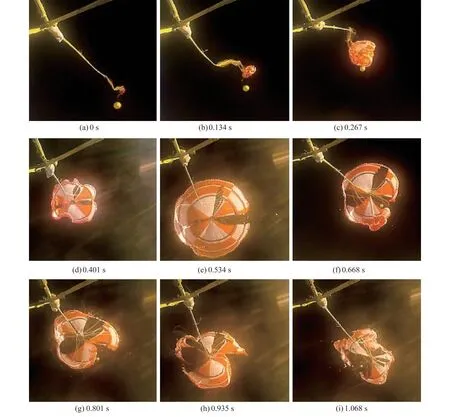
图2 美国新型盘帆伞充气破损[11]Fig.2 Canopy damage in the inflation process of American new Disksail parachute[11]
由以上故障案例可知,降落伞充气过程出现问题的情况较多,与该过程的复杂湍流和柔性结构动力学特性有关。因此,目前工程上一般是采用基于试验数据修正的半经验半理论方法,而不同伞型、不同尺寸、不同开伞条件对应的充气过程关键参数有明显差异。近年来,基于流固耦合等方法对降落伞充气过程进行的数值仿真得到了较好的规律性结果,但还需进一步提高仿真精度。
3.5 稳降过程故障
降落伞充气张满后对航天器发挥稳定减速作用,从而达到稳降状态。此阶段需要注意降落伞与航天器构成的组合体是否具备良好的运动稳定性。阿波罗飞船返回舱在开展空投试验时曾出现过由于组合体运动不稳定,导致降落伞吊带与返回舱结构发生摩擦而断裂的故障,最终将降落伞连接舱体的吊带局部更换为钢缆得以解决。
除了组合体不稳定导致吊带损伤的故障外,还需要注意降落伞的充满状态是否受前体尾流的影响而发生塌陷情况。一般而言,降落伞充满后的局部塌陷会随着前体速度的降低和姿态的稳定而消失。但是,对于一些高速开伞、前体攻角大、尾流作用距离远的情况也可能导致降落伞塌陷加剧甚至显著丧失阻力性能的情况出现。因此,一般需保证降落伞的拖曳距离不小于前体直径的4~6倍,以避免此类故障发生。对于火星降落伞等超声速开伞条件,甚至应将前述数据控制在8~10倍。
此外,航天器在降落伞作用下进入稳降后,如果其他系统工作,需要考虑是否会对降落伞工作带来不利影响。此类故障的典型案例是美国阿波罗15降落伞回收系统的开伞过程。其开伞初始阶段的所有程序工作正常,3个主伞顺利拉直、初始充气、解除收口、张满并进入稳降,但随后1个主伞发生故障,最终返回舱在2个主伞作用下降落水面。NASA成立调查组进行了深入分析得出,故障是返回舱进行推进剂排空操作而引起的,返回舱吹除的推进剂(氧化剂为四氧化二氮)喷洒到故障降落伞上发生了燃烧现象,导致该伞的吊带和伞绳损坏。
3.6 多级伞工作转换故障
航天器降落伞回收系统往往采用多级伞减速方案,如返回式卫星、载人飞船等都使用了减速伞和主伞的2级降落伞系统。高速情况下,先打开面积较小的减速伞,减速到一定程度后再打开面积较大的主伞。工作转换时,可以利用减速伞分离时直接拉出主伞,也可以分离完减速伞后再通过单独的引导伞来拉出主伞。多级伞工作转换故障主要表现为减速伞分离异常或主伞拉出异常。
减速伞分离异常问题偶有发生,除了要确保相应的分离装置工作可靠外,还应关注分离通道是否畅通,是否存在分离过程钩挂的可能。
主伞拉出异常与前文拉直故障类似,因此要确保主伞包拉出通道畅通,降落伞能够有序从伞包拉出,防止拉直过程伞包与舱体结构碰撞或钩挂。美国航天飞机助推器回收系统除了前文提到的第3次飞行试验出现3个主伞失效的故障外,之后还发生了多次问题,尤其是主伞失效或明显损伤的情况非常突出。NASA为此成立了专项的调查研究团队,得出的主要意见之一是减速伞与主伞的转换环节设计不合理,主伞的拉出过程容易与舱体结构碰撞,多个主伞拉直时容易出现顶孔缠绕,从而易导致主伞故障。因此,除了对主伞采取一系列加强措施外,调查团队对于减速伞拉出主伞的环节提出了多项修改建议,包括增加主伞引导伞、调整主伞包固定方式、主伞包与舱体结构间增加吸能装置等。
此外,要关注降落伞之间的连接状态,确保伞包能被正常拉出。2019年,美国波音公司进行CST-100飞船逃逸救生试验时发生了1个主伞没有打开的故障,该问题是由于1顶主伞与其相对应的引导伞之间的连接销安装错误导致。
3.7 群伞干扰故障
对于大载重航天器,如美国的阿波罗飞船、航天飞机助推器、猎户座飞船、CST-100乘员飞行器、SpaceX的龙飞船以及中国新一代载人运输飞船等均采用了群伞减速方案。与单伞相比,群伞回收系统具备互为热备份的特点,但也增加了群伞干扰故障的风险。如前文所述航天飞机助推器多次主伞故障,多次出现不同主伞之间从拉直到充气过程的缠绕问题。
除了相互缠绕之外,还有一类故障情况是不同降落伞充气展开不同步,导致不同降落伞承受开伞载荷有明显差异,甚至可能超过降落伞的强度条件。特别对于群伞系统,如果1顶降落伞拉出过程即失效,其他多伞又充气展开不同步,将很可能导致先展开的1顶降落伞承受过大载荷而损伤,从而群伞系统所期望的互为热备份的目标不能实现。美国SpaceX公司龙飞船降落伞系统采用了4个主伞的群伞方案,2019年4月,SpaceX公司对龙飞船降落伞系统开展故障模式空投试验,验证1顶主伞失效情况下,另外3顶主伞是否能够满足安全回收需求。该次试验失败,导致落地速度超出预期要求,具体原因未见公布,但群伞干扰的因素难以排除。
除了相同状态降落伞组成群伞系统之外,也有采用不同降落伞组成群伞系统的情况。虽然不同状态降落伞并不一定要求同步充气,但相互干扰导致的故障需要特别注意。例如,美国猎户座飞船开展降落伞系统空投试验时,为了给需要验证的降落伞系统创造开伞条件,采用了一大两小的群伞系统作为投放模型的试验程序伞。结果出现了2个小伞对大伞产生干扰的现象,最终导致大伞失效,模型失稳,并引发需验证降落伞系统的减速伞弹射拉直后吊带被磨断,且未能达到需验证主伞的开伞条件,模型坠毁,试验失败,如图3所示。
图3 美国CEV降落伞系统空投试验故障[24]Fig.3 American CEV parachute system malfunctioned in a drop test[24]
3.8 备份降落伞切换故障
联盟号飞船、神舟飞船的回收着陆系统设置有主份、备份降落伞。如果主份降落伞出现故障,则及时将其从返回舱分离,并打开备份降落伞,从而确保航天员的生命安全。如何确保转换备份的可靠,必须予以重视。
载人航天史上,联盟一号的坠毁是最为惨痛的事故之一。经过事故调查分析,联盟一号由于回收程序故障,主份主伞未能正常打开,航天员手动触发备份降落伞系统工作,但是备份伞和未能分离的主份伞发生缠绕,备份伞也未能正常张开,阻力损失严重,导致返回舱高速降落地面,航天员科马罗夫牺牲。图4为联盟一号返回舱坠毁的场景。

图4 联盟一号返回舱坠毁照片Fig.4 The picture of crashed return module of Soyuz-1
3.9 其他环节故障
一般而言,降落伞进入稳降并正常工作一段时间后,已经运行平稳,故障发生概率相对较小。但是,对于转换吊挂等动态过程还需特别重视。转换吊挂环节,在短时间内实现航天器姿态的突变,会产生较大的过载,降落伞及相关的连接分离机构、垂挂吊索等必须具备足够的强度,避免在冲击载荷作用下破坏。对于吊挂重量分离环节,由于降落伞作用的重量突然降低,会导致降落伞阻力面积短时间内突然变小,从而产生结构的波动,因此同样需要注意是否会对连接环节产生影响。
一些航天器着陆后,为了避免被风拖曳,需要及时将降落伞分离。该环节可能出现的故障主要是过载开关等控制装置或脱伞器等分离装置工作异常。对于着陆水面的情况,有时还需降落伞发挥标位功能,此种情况下的故障一般出现为降落伞附带的浮囊装置发生损坏。需要特别注意的是,对于降落伞着陆分离的环节,必须避免在空中提前分离的故障发生,可采取分离装置加电时间延迟、多重指令触发等保护措施。
除了关注降落伞回收系统自身工作可靠之外,在某些应用场合还应关注降落伞系统是否可能对其他系统产生不利影响。例如,2016年10月19日,欧空局的Schiaparelli探测器进入火星大气后,虽然开伞正常,但最终探测器仍然坠毁。分析表明故障的主要原因是降落伞在超声速条件下的喘振导致探测器运动姿态的剧烈变化,其幅度超出了惯性导航设备的适应范围,从而导致探测器控制程序异常。
4 小结
对于进入/返回式航天器而言,大多采用降落伞回收系统实现安全着陆。降落伞回收系统的工作正常与否影响飞行任务成败。降落伞回收系统涉及到降落伞弹射分离、拉直、充气(含有收口及解除收口等不同程序)、稳降、多级伞转换等一系列工作环节,程序不可逆,每一个环节都必须保证可靠工作。因此,降落伞回收系统的故障识别与控制至关重要。
从本文所述国内外降落伞回收系统典型故障案例来看,拉直、充气以及群伞系统工作阶段是出现问题较多的环节。其主要原因是这些环节具备柔性体快速大变形的工作特点,涉及复杂的柔性体非线性流固耦合问题,地面模拟试验困难。目前相应的仿真分析技术还在发展中,计算精度尚未达到能够充分指导工程设计的程度,应加强相关数值建模与分析研究,从理论、方法、设计上提升降落伞回收系统的可靠性。
在加强理论方法与仿真分析的同时,降落伞系统的试验验证不容忽视,只有通过充分的模拟真实工作条件的考核,才能确保降落伞回收系统的工作可靠,确保航天器安全着陆的风险可控。以美国为鉴,从阿波罗飞船到CST-100飞船、龙飞船,经过了数十年发展,新研的每套降落伞回收系统仍然需要开展数十次空投试验验证,且试验过程中仍是多次出现故障或异常问题,通过解决试验暴露的问题而得以有效提升降落伞回收系统的可靠性。降落伞系统研制过程中的强度试验和系统级空投试验是最基本的2类验证试验。
加强设计与验证的同时,有必要充分吸取国内外各类降落伞回收系统发生故障的教训,对降落伞回收系统从整个研制周期、全部工作剖面严控质量,关注细节,充分识别并控制风险,确保系统的高可靠、高安全。
猜你喜欢
环球时报(2022-04-28)2022-04-28
散文诗世界(2021年7期)2021-08-03
军事文摘·科学少年(2021年6期)2021-06-24
祝您健康(2020年10期)2020-10-12
作文·小学低年级(2020年8期)2020-10-09
工业设计(2020年3期)2020-05-14
小溪流(画刊)(2017年11期)2018-01-09
创新作文(1-2年级)(2016年12期)2016-12-26
高中生·青春励志(2014年11期)2014-11-25
数学教学通讯·小学版(2014年3期)2014-04-02
