拖拉机最小转向圆半径静态测试系统设计与试验
2022-08-19 14:03:20张浩男张友坤卢延辉
中国测试 2022年7期
张浩男,张友坤,卢延辉
(吉林大学汽车工程学院,吉林 长春 130025)
0 引 言
拖拉机最小转向圆半径是重要的转向性能和通过性能参数,最小转向圆半径的测试可以评估转向系统部件的设计及装配质量。目前,拖拉机最小转向圆半径一般通过场地试验进行测试,试验过程中,驾驶员根据试验标准,将转向盘打到极限位置,同时将车速控制在最低稳定车速,然后用米尺测试车轮轨迹形成的转向圆半径[1]。这种试验测试方法受限于场地,并且耗时费力。
在农业机械自动导航领域,转向轮的转角测量是关键技术之一,最直接的测量方法是在转向轮上直接安装传感器,如张智刚等[2]采用绝对式编码器测量转向轮转角;Xiang Y、胡炼等[3-4]通过电位计测量转向轮角;黄培奎等[5]在方向盘中安装编码器,通过方向盘与转向轮间的传递关系间接测量转向轮转角;何杰等[6]采用双MEMS陀螺仪测试农机转向轮转角。这些测试方法需要在拖拉机特定位置安装布置传感器,不适合快速检测。
激光位移传感器的基本工作原理是相位法,即通过检测发射激光和在被测物体表面反射激光之间的相位差计算距离[7]。因为尺寸小巧、测试速度快以及非接触式测量等优点,激光位移传感器被广泛应用于不同场合的测试中,例如实际生产过程中的设备定位[8-9],产品或设备的误差检测[10-14],自动检测[15-19]中对变形、圆度等参数的测量问题,医学治疗中的康复评价[20]以及高精度的几何尺寸测量[21]问题。
当拖拉机以最低稳定车速行驶时,侧向力小,轮胎的侧偏现象可以忽略,这样最小转弯半径是可以通过转向轮的最大转角计算求出的。据此,本文设计了一种拖拉机最小转向圆半径静态测试系统,系统通过对转向轮极限转角的测试,计算出拖拉机最小转向圆半径。测试系统采用非接触式的激光位移传感器作为测试元件,可以高效省力地进行转向轮转角测试,提高拖拉机下线检测过程中最小转向圆半径测试的试验效率;利用最小方差估计算法识别出轮胎胎冠上的对称区域,通过轮胎侧面的断面轮廓确定轮胎转角,进而计算出拖拉机最小转向圆半径;开发自适应滤波算法,根据激光位移传感器信号强度信息以及测试信号方差动态调节滤波强度,在保证一定测试精度的前提下提高测试速度。
1 测试系统原理
拖拉机的最小转向圆半径可以通过转向轮最大转角计算得到:

式中:Rmin——最小转向圆半径;
L——轴距;
b——轮距;
M——转向节距;
αmax——外侧转向轮的最大转角。
拖拉机最小转向圆半径测试系统由分别布置在拖拉机左右转向轮外侧的轮胎转角测试装置、工控机、摄像头和显示屏构成,如图1所示。

图1 拖拉机最小转向圆半径静态测试系统原理图
测试系统中的轮胎转角测试装置由测试轨架、移动扫描系统、激光测距组件、限位装置组成,结构见图2。测试轨架由水平滑轨和垂直滑轨构成,其中水平滑轨用于带动滑台上的激光位移传感器水平移动,使测量点扫过整个车轮。垂直滑轨用于调节水平滑轨高度,以适应不同轮胎规格,通过调节激光水平扫描线处于轮胎中心高度来提高系统测试精度。

图2 轮胎转角测试装置
测试系统选用的激光位移传感器基本性能参数见表1。
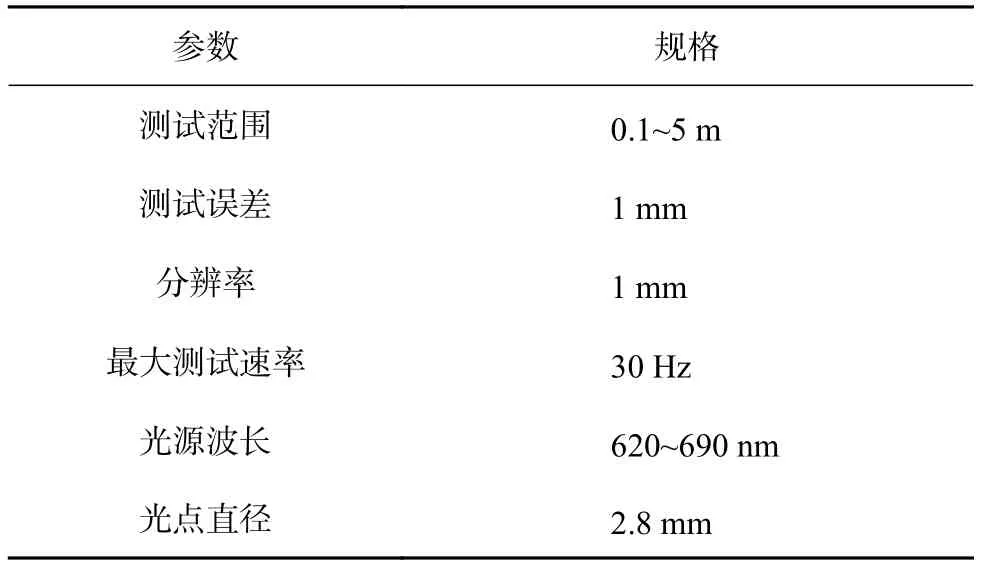
表1 激光位移传感器基本性能参数
工控机、步进电机、激光位移传感器采用CANopen协议组网,工控机利用上位机软件提供人机交互界面,控制步进电机运转,并采集激光位移传感器测试数据,通过数据分析算法获得转向轮极限偏转角,再带入拖拉机结构参数计算出最小转向圆半径。
在应用激光位移传感器进行转角测试时,可获得轮胎两侧距离为S的对称两点的距离D1和D2,相应的轮胎转角的计算公式为:

2 测试系统影响因素分析
应用激光位移传感器进行测试时需要一定的时间以获取准确的相位信息,被测物体表面状态(颜色、材料、倾斜角度等)以及测试速度会影响激光的反射率,从而影响测试精度。本文针对激光反射信号强度及测试速度对测试精度的影响进行研究。
2.1 反射信号强度对测试精度的影响
试验测试采用不同颜色的反射表面,利用下式计算测试方差:测试结果如图3所示。
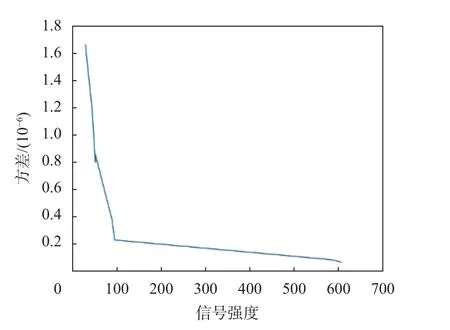
图3 测试方差与反射信号强度之间关系
式中:σ2——测试方差;
n——采样点数;
¯ ——采样均值。
根据测试结果,当反射光强度低于100时,测试方差随着反射光强度的减弱而迅速增加,即测试重复精度降低。
2.2 测试速度对测试精度的影响
均值滤波是工程测试时的常用方法,通过增加采样点数求取平均值来降低随机干扰带来的误差,然而增加采样点数势必要降低测试速度。由于测试信号精度受反射信号的强度影响很大,需要对不同信号强度下采样平均点数与测试精度的关系进行试验研究。利用不同反射材料产生不同的反射信号强度,计算不同均值数量时的测试方差,测试结果如图4所示。
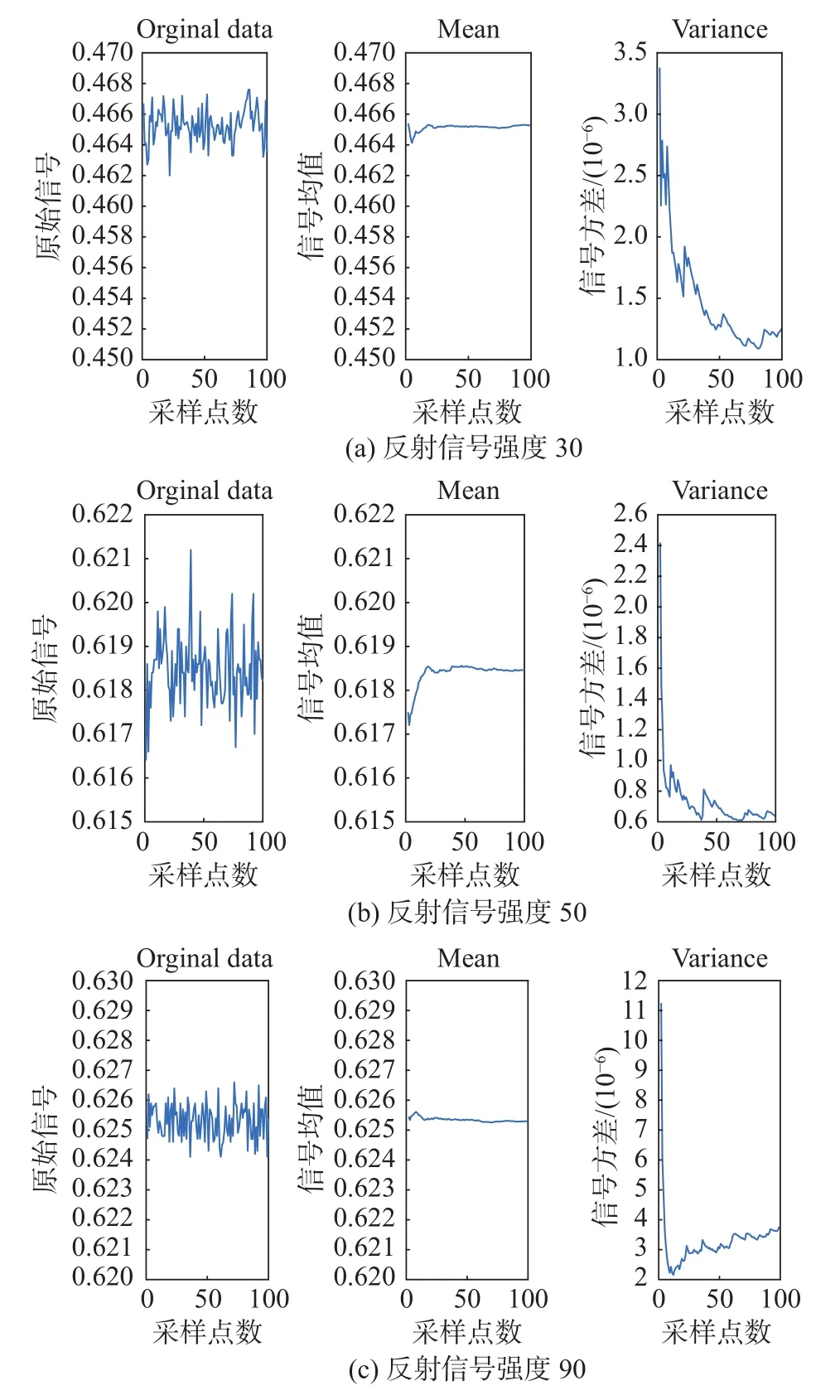
图4 测试信号原始数据、均值、方差与采样点数之间的关系
测试结果表明,随着采样点数的增加,测试方差降低,测试结果趋于稳定。由图可以看出,反射信号强度为30时,测试信号方差大约在采样点数达到80时,达到最小值;反射信号强度为50时,大约在采样点数达到40时,测试信号方差达到最小值;反射信号强度为90时,测试信号方差在采样点数达到10时达到最小值。可见,要提高测试精度所应用的均值滤波采样点数可根据反射信号强度确定。
3 测试系统软件设计
3.1 基于光信号强度的自适应滤波算法
由于激光位移传感器是在移动过程中进行测试的,要提高均值滤波的采样点数就要降低移动速度,并且轮胎表面黑色橡胶的反射面会降低反射光强度,导致试验误差增大,为此开发了自适应滤波算法,根据激光位移传感器信号强度信息以及测试信号方差动态调节滤波强度,在保证一定测试精度的前提下提高测试速度,算法流程图如图5所示。

图5 自适应滤波算法流程图
测试开始时,根据采样获得的信号强度,确定基本的采样样本数,并根据所确定的采样样本数确定步进电机移动速度。然后确定采样寻优区间,在这个区间,采样均值和方差实时计算,每次计算结果与前一次进行比较以找到局部最小方差点,当获得局部最优值时采样结束,输出最终滤波结果。
3.2 基于最小方差估计的轮胎对称区域识别算法
系统在测试过程中记录下步进电机运动的水平距离和激光位移传感器测试的纵向距离,测试结果如图6所示。

图6 距离测试结果
由图可以看出,测试的位移曲线不是平滑曲线,这是因为轮胎侧面形状不规整,且在轮胎轮辋部分有空隙可使测试激光透射,故要应用公式(2)进行转角计算。首先需要在如图6所示的测试曲线中识别出轮胎胎冠部分前后对称的两点D1、D2,而且只有准确识别出对称区域,计算结果才准确。为此开发了基于最小方差估计的轮胎对称区域识别算法,具体如下:
首先将扫描测试得到的步进电机位置—被测轮胎表面距离数据生成二维数组:

式中:xi——ti时刻步进电机位置S(t)的值;
yi——ti时刻激光位移传感器测试距离D(t)的值,i=1,2,···,n。
则该二维数组标识了被测轮胎表面的轮廓信息。根据轮胎表面的对称性,在该二维数组的前、后各选取m组数据作为对称点识别区间,即:


3.3 测试软件开发
为测试系统开发了定制的测试软件,软件运行界面见图7,测试软件流程如图8所示。程序首先进行初始化:要求用户输入待测试车型参数,根据车型参数中的轮胎规格,调节滑轨高度到轮胎水平中心平面处。然后进入测试流程:启动步进电机带动激光位移传感器沿滑轨方向移动,同时开启激光位移传感器的高速测试模式,通过CAN通信读取测试数据。测试之后进行数据处理:首先对测试信号进行自适应滤波,再利用滤波后的数据进行轮胎对称区域识别,利用对称区域的测试值计算轮胎转角,再带入车辆结构参数,计算出车辆最小转向半径,输出测试结果。
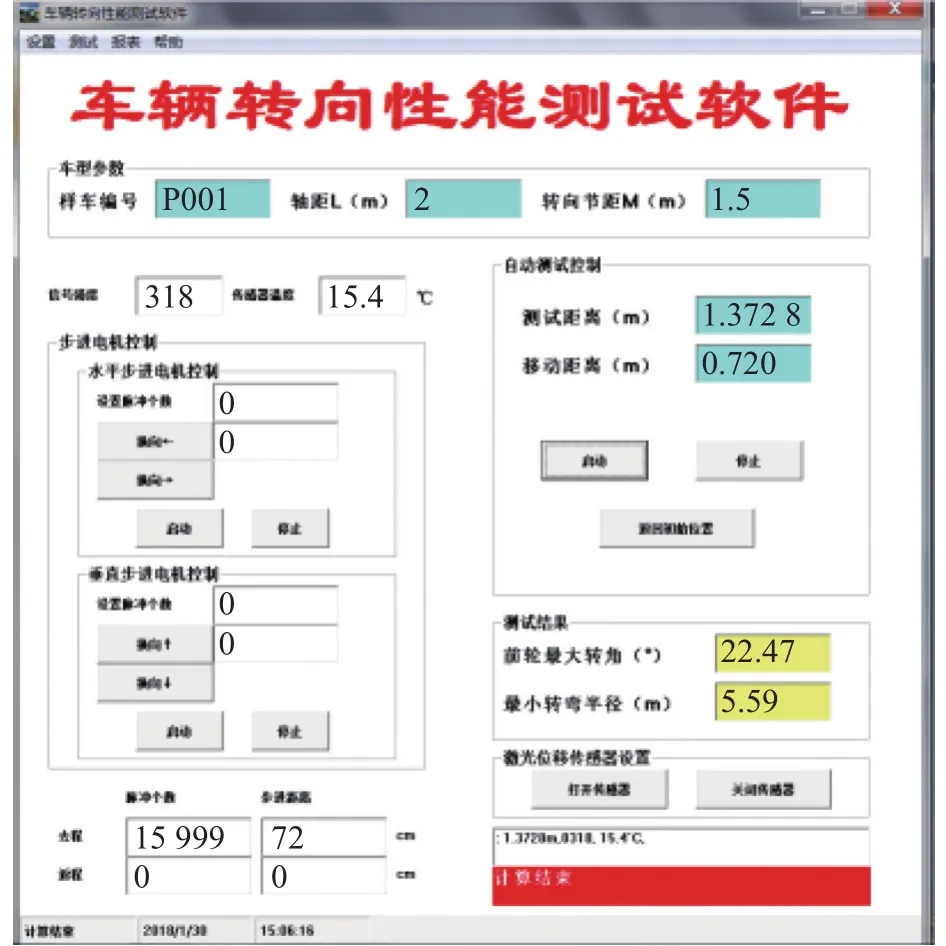
图7 测试软件界面

图8 测试软件流程图
4 试验研究
将测试系统布置在拖拉机检测线上,进行拖拉机最小转向圆半径静态测试试验,试验现场如图9所示。

图9 测试系统试验现场
首先进行了静态角度测试精度试验,固定拖拉机外侧轮胎转角分别为20°和30°,利用系统分别进行3次测试,测试结果如表2所示。
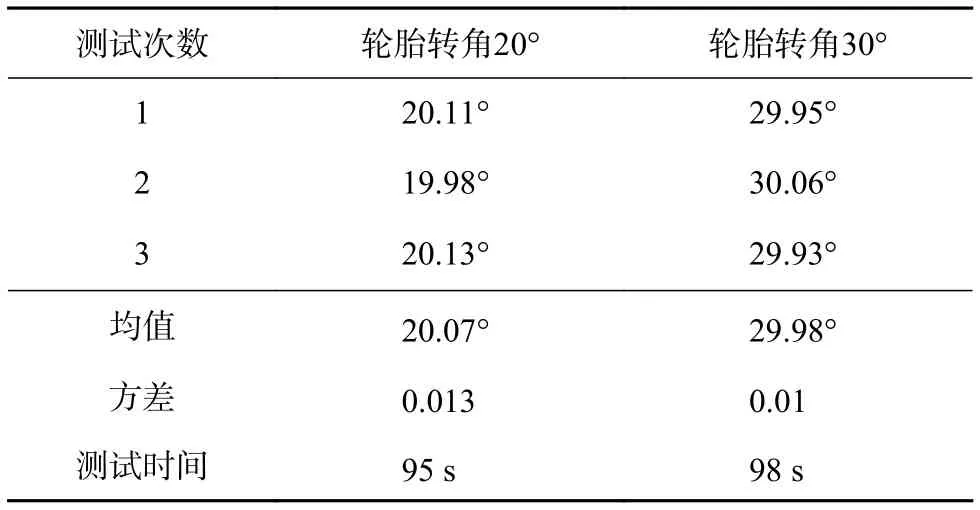
表2 轮胎转角测试试验结果
由表2可以看出,所开发的测试系统测试角度误差为±0.5°。
进行拖拉机转向半径场地试验,如图10所示。

图10 拖拉机转向半径场地试验
将场地试验结果与系统静态测试结果进行对比,结果表明测试系统对转向圆半径的测量误差<2%,并且测试时间在2 min之内,远小于场地测试时间。
5 结束语
1)本文设计开发了一套拖拉机最小转向圆半径静态测试系统,系统采用步进电机驱动激光位移传感器运动,通过激光位移传感器测试拖拉机转向轮断面轮廓,然后计算出拖拉机最小转向圆半径。
2)针对激光位移传感器在信号强度弱时测试误差大的固有特性,采用自适应滤波算法,提高了系统的测试精度和测试速度。
3)采用最小方差估计算法识别轮胎对称区域,实现准确分析轮胎转角。
4)将测试系统布置在拖拉机检测线上,进行了静态角度测试精度试验和场地对照测试试验,试验结果表明,所开发的系统满足测试精度要求且提高了拖拉机最小转向圆半径的测试速度。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
现代测绘(2018年1期)2018-03-06 05:16:16
解放军健康(2017年5期)2017-08-01 06:27:42
小学生导刊(2017年15期)2017-05-17 05:44:08
测绘通报(2016年9期)2016-12-15 01:56:16
小布老虎(2016年12期)2016-12-01 05:47:00
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
计算机工程(2015年8期)2015-07-03 12:19:45