小波阈值去噪法在MEMS陀螺信号处理中的应用
2022-08-19 13:01:48菁邹瑜光
宇航计测技术 2022年3期
汪 菁邹瑜光
(神州五行航天科技有限公司,大连 116085)
1 引 言
MEMS(Micro Electromechanical Systems,微机电系统)具有低成本、低耗能、结构简单、易于集成等鲜明特点,适合批量生产,因此近年来被广泛应用于各个领域。 以MEMS 技术为基础的MEMS 陀螺现阶段已成为低成本导航不可替代的惯性测量仪器之一,但由于其精度低、误差大的缺点,对导航精度会产生较大影响。
改善MEMS 陀螺输出性能主要有两种方法:一是通过工业及工艺技术提高输出性能,例如提高敏感结构的真空封装技术、温度补偿技术、集成化水平、微机械加工工艺技术等。 但受限于目前的工艺技术,MEMS 精度每提高一个数量级,成本便随之提高数十倍甚至数百倍,这导致MEMS 陀螺在高精度领域内竞争力远不及光纤陀螺或机械陀螺。二是依靠数学手段,通过对系统模型建模从而对输出进行修正。 考虑到MEMS 陀螺一般不单独使用,而是与其他传感器进行融合,共同完成导航任务,因此常采用卡尔曼滤波算法。 但MEMS 陀螺自身性能易受外界环境影响,且陀螺的随机漂移具有非线性、非平稳和慢时变的特点,影响其统计特性的准确性,继而导致系统模型建立不准确,从而降低系统滤波精度,甚至引起滤波发散。 MEMS 陀螺的这种不稳定输出即是输出信号叠加噪声的结果,小波技术是信号去噪领域所使用的主要方法之一,该方法具备的时频局域化及多分辨率特性使其适合分析和处理非平稳信号,因此,近年来逐渐被应用于MEMS 陀螺输出信号的去噪处理。
综合各类采用小波阈值处理MEMS 陀螺信号的方法并进行研究对比,概括出利用小波阈值法对MEMS 陀螺信号去噪的各个步骤间的改进方式和优缺点,结合现阶段不同使用条件下去噪处理的应用现状,以及在导航计算中的使用情况,说明这种处理方法在对MEMS 陀螺进行性能测试时较为有用,而对于实时动态使用时效果不明显,为后续相关研究提供一定的参考价值。
2 小波阈值去噪法
MEMS 陀螺的噪声可分为确定性与随机性两类,其中确定性噪声存在一定的规律性,可通过校准实现补偿,而随机性噪声具有随机性,需要采用滤波进行补偿。
小波去噪法的本质是削弱或去除信号的无用部分,保留或增强信号的有用部分。 通常信号的无用部分(即噪声)占据高频,相对有用信号幅值较小,而有用部分占据低频,相对噪声幅值较大。小波去噪法的处理机制为利用一定手段(小波变换)将信号分解到多个尺度上,通过一定的处理原则削弱或直接去除高频部分,保留或增强低频部分,最后重构信号。 目前小波去噪主要分为以下三种:
1)波变换模极大值去噪法;
2)空域相关去噪法;
3)阈值去噪法。
其中,阈值去噪法无需对含噪信号做任何估计,计算量较小,滤波效果较好,因此使用最为广泛,以下均以阈值去噪法为研究对象。
小波阈值去噪的基本步骤如下:
1)对原始含噪信号进行小波变换,确定分解所用小波基函数以及分解层数;
2)选取合适的阈值函数对高频小波系数进行处理;
3)使用小波重构得到滤波后的信号。
从去噪步骤上可看出,阈值去噪结果与小波基函数、分解层数、阈值函数以及合适的阈值选择均有关。 由于小波基函数较为固定,不再作讨论,以下将详细介绍不同的阈值函数、阈值的选择以及分解层数上的对比。
2.1 阈值函数
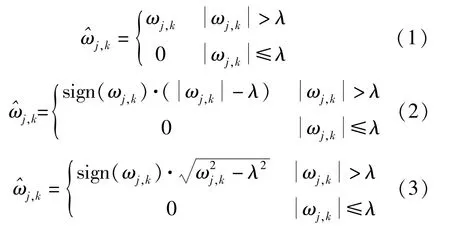
传统的阈值函数有两种,硬阈值函数及软阈值函数,分别如式(1)和式(2)所示。 利用硬阈值去噪后,信号边缘性好,但在阈值处函数不连续,导致处理后的信号会出现较大的振荡,这种现象也被称为伪吉布斯(Pseudo-Gibbs)效应。 利用软阈值去噪后结果相对平滑,克服了硬阈值不连续的缺点,但小波系数整体存在一定偏差,导致重构信号与真实信号间存在失真。 Garrote 阈值(如式(3)所示)综合了两者的特点,函数连续,重构信号不会出现振荡,且因其整体更趋向于硬阈值函数,重构信号不失真。 但由于函数的一阶导数不连续,在处理含突变的信号时去噪效果仍有不足之处。

在传统的阈值函数基础上,众多学者提出各类改进型阈值函数,大致可分为以下六类。
这类阈值函数属于软硬阈值函数的融合型,综合两者的优点,又一定程度上克服各自的缺点。 典型的几种形式有:
1)折衷法

式中:——调节参数,0≤≤1。
折衷法通过调整参数实现去噪效果的调节控制,阈值函数形式简单,不增加计算量及程序复杂度。 但该函数没有避免软硬阈值函数的缺点,重构后依旧会出现振荡与失真,其程度受影响。
2)加权法

式中:——加权因子,0≤≤1。

考虑到在处理小于阈值部分的小波系数时,以上各类函数均直接置零,使得去除了部分高频中的有用信号,降低了重构信号精度,因此,文献[10]在此基础上进行改进,如式(6)所示。 改进后函数含有一个调节参数,通过影响加权因子调整大于阈值部分的小波系数,同时小于阈值的小波系数缩小后也可参与重构。 根据信号具体特点调整参数,从而提高重构信号精度。 文献[11]提出式(7),该函数中包含两个参数与,可根据具体的噪声,同时调整大于阈值部分和小于阈值部分的小波系数,具有更加灵活的特点。 但两个参数如何选取需要结合具体的信号进行设置,这一定程度上增加了调试难度。




这类阈值函数形式多样,属于多项式组合,较典型的如式(8) ~(10)所示。

式中:——高阶因子。
根据式(8)函数形式可知,该阈值函数连续且一阶导数连续,重构信号不振荡,对于突变信号也具有一定的容忍度,但函数形式固定,针对特定信号可能并不是最优处理。 式(9)中高阶因子取值越小,阈值函数的变化曲线愈加光滑,但该函数并不连续。


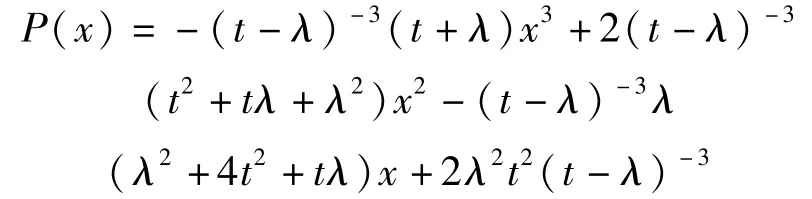
文献[14]提出一种分段式阈值函数,如式(10)所示,该阈值函数设置两个阈值,式中的插值多项式可根据需要自行定义。 若取为三次多项式,考虑到函数的连续性以及可导性,则可取:
由于Garrote 阈值函数兼具软硬阈值函数的特点,对Garrote 函数进行改进也是可选的方式之一,其中具有代表性的有:
其中,0≤≤1,≥1。
特点:该函数连续,且偏差也随着增大而逐渐减小。 但函数存在两个可调节参数,具有一定的调节难度。



其中,0≤≤1。
特点:该方法也称为改进型均方根插值阈值函数。 该函数形式较为复杂,计算量及对应程序复杂度均有所增加。


考虑到自然指数型函数具备高阶可导的特点,许多学者将自然指数引入到阈值函数中,借以克服硬阈值函数的缺点,比较典型的有以下两种:




特点:式(16)中参数直接影响该阈值函数的特性,为控制系数,控制小于阈值部分的衰减程度。 式(15)与式(16)针对大于阈值部分的处理均只包含一个参数,调节难度较小,函数连续且高阶可导。 而对于低于阈值的部分则可根据需要直接置为0,或按预设比例进行衰减。
文献[29]提出一种包含三角函数的阈值函数,如式(17)所示:

其中,=+cos(c ω) +sin(c ω),,,,,均为参数。
该函数具备灵活处理的优势,通过调整参数,可保证函数实现连续过渡,具有硬阈值函数优势;同时函数无固定偏差,避免了软阈值函数的缺陷。 但该函数中包含5 个参数,如何配置各参数尚无有效方法,选择合适的参数配置需要大量的测试及优化工作。
上述各阈值函数均具备一个共通点,即函数值介于软硬阈值函数之间,而文献[30]则提出一种新的阈值函数,如式(18)所示:

其中,0 ≤≤1,=(ω+sign(ω)·)-4,=ω+sign(ω)·。
该阈值函数与上述各函数不同,在大于阈值的部分超过了硬阈值函数,强化了大于阈值部分的信号特点。 这种方法构造的阈值函数可在去噪的同时对信号的尖峰、尖谷进行提取,具有一定的针对性。
从上述阈值函数类型及特点可看出,对于传统阈值函数的改进主要考虑以下几点:
1)阈值函数尽可能连续且具有可导性,这从数学层面上保证了处理后的信号可以克服硬阈值函数的缺点,避免重构信号出现振荡;
2)部分改造后的阈值函数考虑到无偏估计,可保证重构信号与原信号间不存在失真现象;
3)对于小于阈值部分的处理一般可直接置于0,或按一定比例进行衰减。 具体设置应结合去噪信号特点而定,若高频信号中有用信号较多,则应考虑采取衰减的形式进行处理,反之则更适合直接置0;
4)调节参数个数的设置并没有一定的规律可循,往往是提出某一形式的阈值函数后,针对特定信号进行反复的去噪效果尝试。 调节参数的个数越多,则调试越复杂,计算量越大,但去噪效果差异可能并不十分明显。
2.2 阈值选取
常规的阈值选取准则主要有固定阈值(sqtwolog)、启发式阈值(heursure)、Stein 无偏似然估计阈值(rigrsure)以及极大极小准则阈值(minimax)4种。 文献[4]中以MEMS 陀螺信号验证得到,固定阈值具有更好的去噪效果,且该方法也是最为普遍的方法,因此以下采用固定阈值为代表进行对比论述。 固定阈值的选取通常可分为以下4 种:
1)全局阈值

式中:——噪声方差,=0674 5;——首层小波分解系数绝对值的中间值;——信号的长度。
全局阈值为最常见的阈值选取方式,这种方法计算简单,但存在过度扼杀小波系数的问题。
2)自适应阈值
信号与噪声的幅值在不同分解尺度上占比不同,分解尺度越大,信号幅值越大,噪声幅值越小。因此自适应阈值法在不同分解尺度上采用不同的阈值,分解尺度越大,相应的阈值越小,具体如式(20)所示:

式中:——当前分解尺度。
3)局部阈值法(I)
式中:σ——原始含噪信号的噪声方差值;σ——各层的噪声方差值;——当前分解尺度。
该局部阈值既考虑原始信号噪声方差,也考虑局部某层的噪声方差。 当某层的噪声方差值增大时,相应的局部阈值也会增大,反之减小。 当分解尺度增大,小波阈值会随之减小,这也符合不同分解层下噪声分布有所区别的客观事实。
4)局部阈值法(II)

式中:C——调节常数。
这种局部阈值法可通过调节C 从而得到最佳的输出信噪比。
以上四种固定阈值选取方法,计算量最小的为全局阈值法,但不同的分解尺度下使用同一个固定阈值,去噪效果不是最优的。 其余几种均考虑了不同分解尺度下的阈值调整,计算量增加,但去噪效果将得到一定程度的改善。
一般来说,阈值函数均是对高频分量进行处理,而考虑到MEMS 陀螺常见的噪声系数中角度随机游走和零偏不稳定性都是长期的低频现象,因此文献[32]中采用了一种改进的算法,先选择分解水平,并对选定层的低频分量和每一层的高频分量同时进行阈值处理。
常规的阈值选择方法均是针对信号的后处理,即提前计算出信号的整体噪声方差,或如局部阈值法(I)中计算每层分解的信号噪声方差。 文献[33]考虑到MEMS 陀螺在实际应用中短时间内噪声会随机变化,因此采取实时计算采样数据点方差的方法,并利用所得方差对数据噪声进行实时预测,求取频域下的最大幅度值,并分层利用最大幅度值消除噪声。 该方法实时性好,但需要存储设定时间内的所有采样数据值,因此增加了存储器的负担,同时实时计算方差值也增加了计算量,对处理器要求提高,实际中应综合考虑多方因素决定是否需要采用这种方法。
2.3 分解层数
除了阈值函数以及阈值的选取,小波的分解层数对去噪也有一定的影响。 文献[7]中通过对某一MEMS 进行小波去噪测试,验证了针对特定误差项,某一适宜的分解层数有明显的去噪效果。 而多数文献在对被测MEMS 选取合适的小波进行去噪时,也是通过不同类型的小波函数、分解层数进行尝试去噪对比后,选取某一特定的类型与分解层数。 但综合去噪效果来看,分解层数的影响较弱,一般并不作为研究重点。
3 应用现状
对MEMS 陀螺输出信号进行去噪处理后,通常采用信噪比和均方根误差进行比较评价。 近年来,对于小波阈值的改进重点通常着眼于阈值函数的构造形式上。 一般来说,阈值函数保证连续性、可导性以及必要的无偏性,均可获得一定程度的去噪效果,而针对某一特定的陀螺输出信号选用某一适宜的阈值函数,验证去噪后的信噪比以及均方根误差即可证明去噪方法有效。 但由于陀螺性能各异,各类阈值函数之间的去噪效果往往差别并不明显,而对于含参数的阈值函数更需要大量的测试才能选出适合的形式,因此很难挑选出适用于所有MEMS 陀螺的最优小波阈值函数。 考虑到阈值选取以及分层选择也对去噪效果有所影响,综合来看小波阈值去噪法普适性欠佳。 此外,小波阈值去噪针对白噪声抑制简单有效,对有色噪声的抑制效果并不理想,而MEMS 陀螺信号中往往还包含有色噪声,因此不能单纯采用小波阈值法来处理MEMS 陀螺信号。 为克服上述不足,目前常采用多种方法融合以提升去噪效果。 但由于融合方法相比单纯的小波去噪算法计算量大,执行起来无论是对存储空间还是处理器效率均提出较高要求,计算时间长,对实时数据处理产生不利影响。
使用小波阈值去噪对MEMS 陀螺信号处理通常可分为静态及动态测试。 其中,静态测试指在陀螺静止情况下采集输出,通过去噪排除部分噪声干扰,更加直观的分析陀螺性能,为后续陀螺使用或系统建模提供一定的理论基础。 动态测试指陀螺在某一运动情况下采集输出,这种运动情况已知或有规律可循,去噪后可反映陀螺的动态性能特点。 以上均是为分析MEMS 陀螺自身性能而进行的处理,在参与实时的导航计算中使用小波阈值去噪对陀螺信号进行处理的并不多见,部分学者对此也进行过相关尝试。 例如文献[40]经过对比不同类型的传统小波函数及阈值函数,得出小波阈值函数更适用于工作在高动态环境下的惯性系统的结论。 但该文献中仅通过手摇MEMS 进行动态数据采集并去噪,缺乏实际高动态环境中的试验验证。文献[41]将小波去噪处理后的低精度MEMS 信号利用卡尔曼算法再次滤波,陀螺的方差得到显著的改善。 文献[42]提出一种基于小波变换原理的自反馈模型,不仅可补偿陀螺的温漂,同时还可抑制其他过程噪声。 以上各方法虽涉及实际使用情况,但常需要提前对数据进行预处理,存储量与计算量负担明显增加。 对于导航计算来说,实时性至关重要,计算成本以及存储成本均需要综合考虑。 而对于使用卡尔曼滤波算法的组合导航来说,滤波效果足以满足使用,若再添加小波去噪,对于整体效果并没有实质性的改善,计算量却显著增加,对处理器短期处理能力要求提高,降低了整体的效费比。综合以上各类原因,现阶段组合导航中几乎没有同时使用两种方法的案例。
4 结束语
主要总结了近年来小波阈值去噪法在对于MEMS 陀螺去噪方向的发展,依次对小波阈值去噪法中不同的阈值函数形式、阈值选取方式以及分解层数进行了对比,得到如下结论。
1)改进后的阈值函数形式各异,总体上具有连续性、可导性以及无偏性的特点,但普适性不好。针对具体的MEMS 陀螺需要通过反复测试寻求合适的阈值函数、阈值选取以及分解层数;
2)使用小波阈值处理MEMS 陀螺信号多使用于静态或动态测试,借以帮助分析陀螺性能,建立准确的系统模型;实时动态使用较少,对于导航计算来说,计算成本较大,而改善效果不明显,因此使用价值不大。
猜你喜欢
东北水利水电(2022年6期)2022-06-28 06:04:36
康复(2022年31期)2022-03-23 20:39:56
科技风(2021年19期)2021-09-07 14:04:29
电子制作(2019年13期)2020-01-14 03:15:32
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
电子制作(2019年11期)2019-07-04 00:34:50
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
制造技术与机床(2017年10期)2017-11-28 05:20:43