
公路边坡安全智能预警技术研究
2022-08-17 08:02浙江省交通工程管理中心赵殿鹏重庆交大交通安全科技研究院有限公司杭州分公司缪燕兵袁舟焦德军
中国建设信息化 2022年14期
文|浙江省交通工程管理中心 赵殿鹏;重庆交大交通安全科技研究院有限公司杭州分公司 缪燕兵 袁舟 焦德军
0 引言
我国地质灾害发生频繁,灾害面广、类型多、规模大、危害深[1],在山区,公路边坡点多、线长、沿线环境多变,边坡灾害频发且不易防治。因此,山区公路边坡地质灾害的监测及预报预警成为了工程界分析和研究的重点。
目前常用的公路边坡地质灾害监测方法主要以全站仪、摄影测量、传感器、InSAR 和GNSS 为主。GNSS 在线监测技术在全天候和自动化方面实现了更高层次的水准,突破了以往人工监测短板的不足[2-3]。已经投入运营的GNSS 有美国的GPS、俄罗斯的GLONASS、欧洲的GALILEO 以及我国自主研发的北斗卫星导航系统(BDS)。BDS 相对于GPS 而言,在我国有着更好的卫星信号覆盖,对于复杂坏境下的变形监测更有优势。受益于BDS 的混合星座模式,高轨卫星更多,因此在低纬度地区的扛遮挡能力更强。
近年来越来越多学者开始将北斗应用于边坡灾害预警领域。过静等[4]利用“北斗一号”卫星系统在四川雅安地区进行滑坡自动化远程监测示范研究,并建成了滑坡综合监测系统。黄观武等[5]将位移计、测量机器人、北斗实时监测进行组合应用,研制开发了北斗实时滑坡监测系统。张云龙等[6]针对北斗双天线高精度变形监测关键技术进行了研究,构建了超短基线和短基线北斗/GPS 单差高精度定位模型。刘立等[7]将北斗和InSAR 融合,建立了一套基于地表形变的地质灾害监测技术。蒋超等[8]利用北斗通信和导航技术,开发了基于北斗的地质灾害实时监测系统,并将该系统应用于北川白岩地区。杨凯等[9]对北斗系统的定位精度、时间可用性和空间可用性进行了研究,完成了滑坡监测点实地监测实验,以及监测点坐标时间序列噪声特性分析同时,三维地质建模重要性日益显现,其中以无人机倾斜摄影技术为代表性,克服了精度不足、信息不全的问题。
本研究基于北斗及无人机倾斜摄影结合的方法,提高了对于边坡变形监测的效率、对重点边坡的防范,实现动态联动自动化。
1 边坡隐患识别
本文利用无人机倾斜摄影技术对边坡隐患进行识别并进行影响区划分,进而对重点边坡灾害进行防控。
无人机倾斜摄影技术以构建三维模型为目标,使用传感器进行多角度航摄,覆盖范围内的地物、地貌及位置信息等影像资料,进而构建边坡三维模型。主要分为数据抓取、数据处理、影像匹配、组建模型等环节。
(1)野外数据采集,获得影像数据、POS 数据、地面控制点,进而进行区域网联合平差解算,构建3D TIN,生成三维模型,以实现边坡危岩段接触式测量,该三维模型信息精度更高,更精细化,可靠性更强。
(2)通过生成的三维模型对边坡体关键地质信息提取及结构面产状统计分析,推出结构面基本物理参数、边坡区优质结构面展布特征、基于赤平投影法并考虑结合面组合特征各类型危岩体失稳模式,最终分析优势结构面空间展布特征及组合关系,判断危险边坡失稳模式,实现非接触式崩塌隐患早期识别。
(3)通过对危险边坡稳定性进行评价,对危险边坡失稳运动进行轨迹数值模拟,推出不同边坡失稳后,危岩体崩落运动轨迹及影响区划分结果,安全高效实现崩塌灾害影响区划分,为防灾、减灾及监测预警提供可靠依据。
2 边坡风险预警
北斗云监测系统利用北斗高精度 GNSS监测仪实施对边坡位移变形量的持续监测,监测数据通过传输模块实时回传至监测云平台,在监测数据处理后生成监测报告。边坡风险预警系统主要包括边坡数据采集、数据传输、数据分析和结果输出四部分,能够实现从数据采集到数据分析再到监测结果呈现的全程自动化[10]。
2.1 北斗导航系统
北斗导航系统是全球四大卫星导航系统之一,其与俄罗斯GLONASS、欧洲Galileo 和美国GPS 的不同之处在于,它不仅同时采用了IG-SO 、GEO、MEO 三种卫星星座,而且是由中国自主研发而成。随着对它的挖掘与运用,北斗导航系统广泛应用于交通运输领域、军事领域等。
北斗通信站主要由基础资源层、北斗地基增强系统、北斗位置服务中心组成。其中,基础资源层主要为使用者提供接入网络的不同方式,同时将原始数据传输给北斗位置服务中心;北斗地基增强系统主要对基站采集数据进行有效处理并传送至北斗位置服务中心;北斗位置服务中心主要对北斗地基增强系统传输的信息进行高精度解读与分析处理,以实现使用者的需求。该通信站同时可以与其他领域特征进行融合与信息交互,实现其他领域对其的特殊要求。
2.2 北斗监测设备
北斗监测设备主要包括了以下几个部分:监测仪、主机箱、GNSS 定位天线、太阳能电池板。其中,GNSS 定位天线,用以接收北斗定位信号。北斗监测设备主要是利用无线设备将定位板块得到的数据通过天线及数据板块传输至监测云平台。
心智模式是指对看待传统事物形成的固定思维模式。这种模式一旦形成,便会对人的思维起到一定引导作用,利用原有的认知和态度去看待问题,而且通常会使用固定的方式解决问题,这种惯有模式会限制主体对新事物的创新思维能力构建,在社会迅速变化并且不断创新发展的过程中,这种惯性思维经常会影响主体做出错误的判断和行动。而改善心智模式,对管理者提出更加优质的解决办法和对策具有重要促进作用,可以使组织更好地提高绩效[1]。
虽然国内外诸多学者都对北斗的监测方案和监测数据与灾变相关性进行了研究,但是并没有统一的标准和规范。基于此,本文提出通过模糊分析划分山区公路边坡地质灾害易发区,以灰色系统分析模型为基础,对北斗监测系统进行优化布置,减少冗余监测点,建立北斗监测方案。
其监测布点布设思路如图1所示:

图1 监测点布设方案设置
2.3 监测云平台
北斗 GNSS 监测仪将各监测点的位移信息(曲线、数据等形式)输送至数据汇总站,继而利用无线网络传输至监测云平台储存及供管理人员实时查询、参考。同时,根据预设的预警模型对GNSS 数据进行处理与分析,对超过设定阈值的形变值发出警报,提醒相关人员进行排查与整改。
2.4 北斗系统监测数据应用
为收集边坡监测数据并判断边坡的状态的稳定性及变形趋势,北斗卫星监测系统需要对采集到的边坡三维数据进行有效的处理,然后进行边坡变形的预测。
当前对边坡系统监测数据进行处理的方法主要有卡尔曼滤波法、灰色系统分析法、回归分析法等。灰色系统分析法具备计算方法简单、所需监测数据量较小、变形趋势分析实用性高等特点。因此,本文采用灰色系统分析法处理并进行变形趋势分析。数据处理时,将水平面方向位移值与沉降方向位移值分别进行数据处理。其中,边坡水平方向的两个位移用l 与m 方向的位移矢量表示,竖直位移用z 方向的位移矢量表示。l、m、z 表示方向如图2所示。
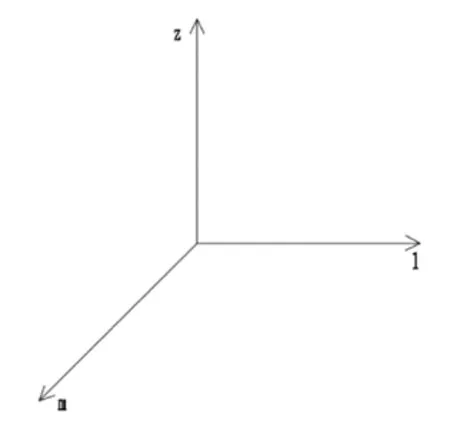
图2 l、m、z 方向示意图
将边坡在水平方向的位移矢量和用表示,竖直方向的位移用 表示,则:

同时,将水平方向位移和竖直方向位移分别累加,作为水平方向和竖直方向的累积位移量S,并建立起灰色预测模型。
原始监测数列表达式:

对上式进行累加可得:

对 的GM(1,1)模型建立一阶微分方程为:

其中,a 是边坡位移发展系数,主要用以预测边坡位移发展态势;是灰色作用量,主要用以反映数据变化关系。通过最小二乘回归原理计算方程,可以计算得出模型中的参数向量为:

再对上式进行累减,可获得模型的还原数据:

推导出:

建立的灰色预测模型用以对原始数据进行计算分析来预测边坡的变形趋势。
对边坡监测数据进行处理,得到边坡变形随时间变化的累积位移曲线,并直观地从曲线切线角的变化确定边坡变形速率[11]。通过观察,边坡的变形速率可分为加速变形阶段、匀速变形阶段、减速变形、再加速变形阶段直至失稳。其中,加速变形阶段是指累积位移曲线的切线角持续增大的阶段;匀速变形阶段是指累积位移曲线的切线角稳定的阶段;减速变形阶段是指累积位移曲线的切线角持续减小的阶段。一般来说,当切线角角度达到90°时,边坡失稳破坏,但在外部因素的作用下,将70°左右的切线角角度当作评判边坡是否失稳的临界值。边坡累积位移曲线的切线角如图3所示。

图3 边坡累计位移曲线切线角示意图
根据位移曲线推出的切线角求解方法为:
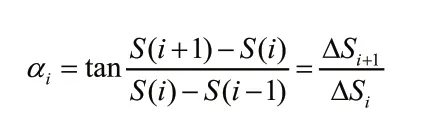
式中:ΔSi为某单位时间段内累计位移的变化量;ΔSi+1为下一个单位时间段累计位移的变化量。
当αi<45°时,边坡为初期变形阶段,此阶段需要使用者加强对影响边坡稳定性因素的分析,同时加强对边坡的巡逻与和监测。
当αi≈45°时,边坡为匀速变形阶段,此阶段需要使用者进行预警监测,通过现实情况与数据相结合的模式,得到数值模型以获取其失稳的预测时间。
当αi>45°时,边坡为加速变形阶段,此阶段需要使用者进行失稳预警,通过建立的数值模型将监测数据的最后部分资料作为基点,预测边坡后续趋势及边坡整体失稳破坏的时间。
3 结论
提出了一套以无人机倾斜摄影结合北斗高精度变形监测技术的方法,通过以无人机倾斜摄影对边坡隐患进行识别并进行影响区划分,进而对重点边坡重点防控,结合北斗系统对边坡进行实时监测预警,提高了对于边坡变形监测的效率、对重点边坡的防范,实现了动态联动自动化。
提出通过模糊分析划分山区公路边坡地质灾害易发区,以灰色系统分析模型为基础,对北斗监测系统进行优化布置,减少了冗余监测点,提高经济性,节约资源。提出将监测点边坡水平面方向位移值与沉降方向位移值分开处理的方式。将边坡变形位移曲线切线角作为表征边坡状态的指标。以变形位移曲线切线角70°作为边坡失稳发生的临界值。
变形位移曲线切线角αi<45°时,边坡处于初期变形阶段,此阶段需要使用者进行对边坡进行不间断监测;当αi≈45°时,此阶段需要使用者进行预警监测,通过现实情况与数据相结合的模式,得到数值模型以获取其失稳的预测时间;当αi>45°时,边坡处于加速变形阶段,此阶段需要使用者进行失稳预警,通过建立的数值模型将监测数据的最后部分资料作为基点,预测边坡后续趋势及边坡整体失稳破坏的时间。
猜你喜欢
公民与法治(2022年10期)2022-12-29
小哥白尼(神奇星球)(2022年3期)2022-06-06
煤气与热力(2022年4期)2022-05-23
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19
陕西农业科学(2020年6期)2020-07-06
新世纪智能(数学备考)(2020年12期)2020-03-29
当代陕西(2019年18期)2019-10-17
课程教育研究(2017年26期)2017-08-02
大陆桥视野(2016年20期)2016-12-13
太空探索(2016年12期)2016-07-18
