
基于无人机遥感技术的工程测绘应用方法
2022-08-15 06:00秦聪
电气自动化 2022年4期
秦聪
(山东光庭信息技术有限公司,山东 烟台 265699)
0 引 言
由于城市现代化发展以及乡村振兴战略的实施,建设工程呈现规模大和数量多的问题,需要通过无人机遥感技术来代替传统人工测绘方法,使工程测绘工作更快速准确,为工程建设提供保障[1-2]。
文献[3]提出了使用遗传算法来对航线进行规划,并将其结果与粒子群算法结果进行比较,体现了遗传算法的优越性,但是遗传算法会出现陷入局部最优的情况,且存在航线代价较大的问题。文献[4]优化了无人机航线规划,对无人机测绘流程做了详细指导,通过增加无人机双频GPS相位进行拍摄,利用差分GPS技术精确获取曝光点坐标,但没有对无人机测绘图像进行进一步的处理,存在准确率较低的问题。
1 无人机遥感工程测绘架构设计
针对上述材料存在的不足,提出一种新型的基于无人机遥感技术的工程测绘应用方法。在无人机遥感航摄准备工作中,采用改进蚁群算法对无人机航线进行优化,在确保测绘工作完成的同时保证航线代价最小,安全性最好[5]。在测绘图像处理过程中使用超像素图像分割技术对无人机采集及矫正后的图像进行划分,再利用内核影像技术对图像布局进行标定处理,提高测绘数据的准确率[6]。基于无人机遥感技术的工程测绘应用总体框架如图1所示。
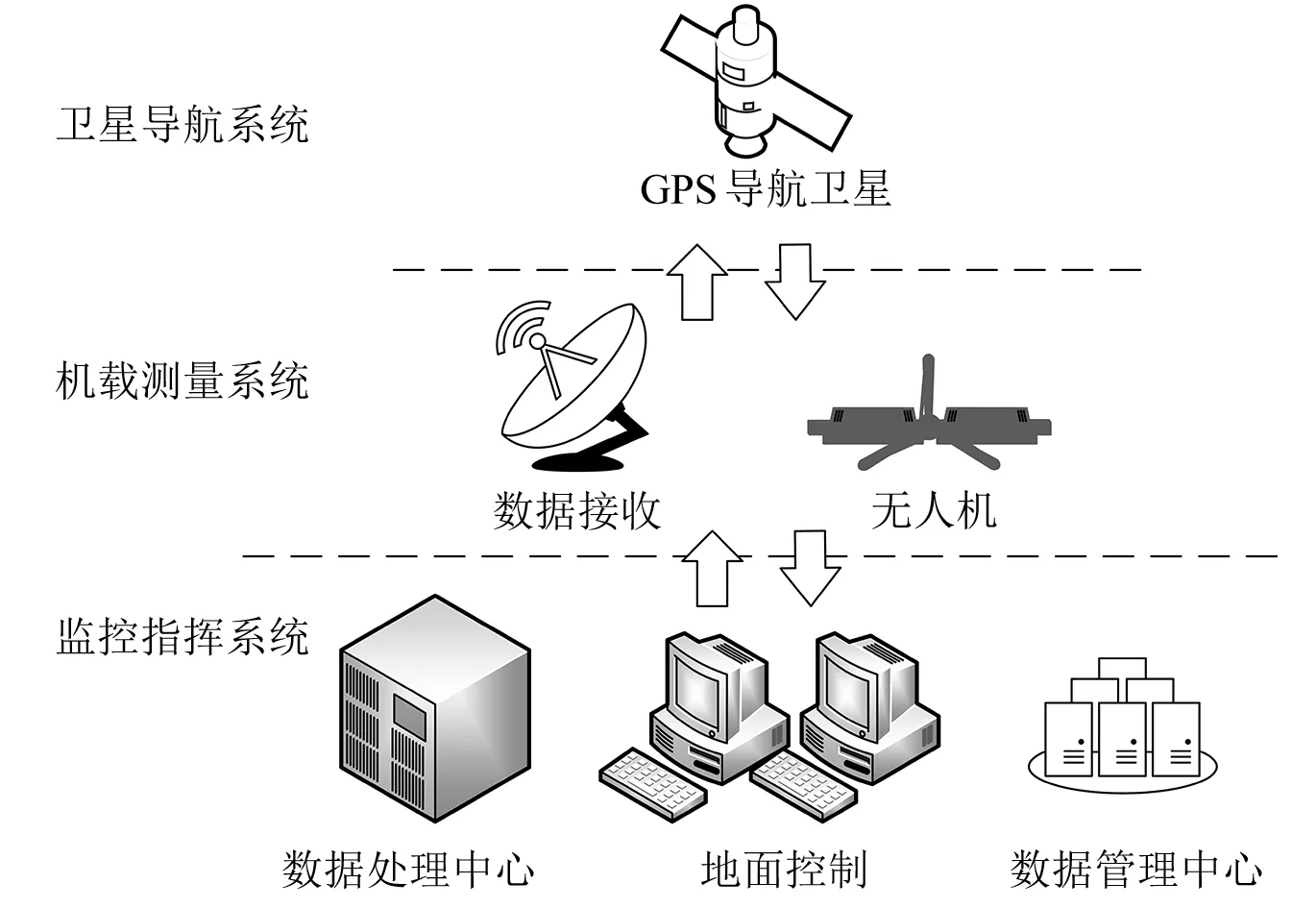
图1 无人机遥感技术的工程测绘示意图
基于无人机遥感技术的工程测绘架构按照功能可分为3个模块。
(1) 监控指挥系统。主要负责数据和图像的采集与处理。首先需要工作人员对测绘地区数据进行汇总分析,在保证任务完成的情况下,对无人机发出飞行线路设计指令,对获取的数据进行复核检查,其次将收集得到的图像进行整理再加工,为测绘提供有效指导[7]。最后将数据和图像进行合理的管理,为下一次的飞行测绘内容做好补充依据。
(2) 机载测量系统。机载系统根据指挥系统发出的指令开展测绘工作,无人机飞行灵活,能够在保证机身安全前提下,在雷达信号范围内进行拍摄,并在各种复杂的环境中完成测绘任务,将大量的图像及数据进行储存和传输[8]。
(3) 卫星导航系统。借助卫星定位系统实现无人机精准定位功能,根据卫星提供的坐标系统,建立三维地形模型,利用卫星遥感影像数据进行定点拍摄,保证无人机在指定工作区域内完成测绘工作。
2 基于无人机遥感技术的图像获取及处理
利用无人机及遥感技术进行工程测绘离不开一套规范合理的工作流程,无人机测绘作业流程如图2所示。
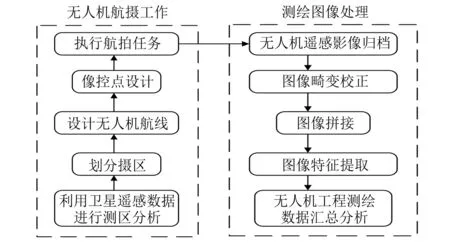
图2 无人机测绘作业流程
无人机拍摄需要在保证安全飞行的前提下,既确保无人机拍摄影像满足测绘要求,方便后期进行图像处理,以确保测绘数据高度精确,又要控制好像控点个数,确保航线合理,尽可能减少航摄次数,将飞行航程降到最低。
2.1 基于改进蚁群算法的路线规划
在对无人机航线进行设计时需要综合考虑步长、偏航角、爬升角、飞行高度和航程距离等因素。综合上述因素,无人机飞行航线存在以下约束条件:
(1) 航行步长
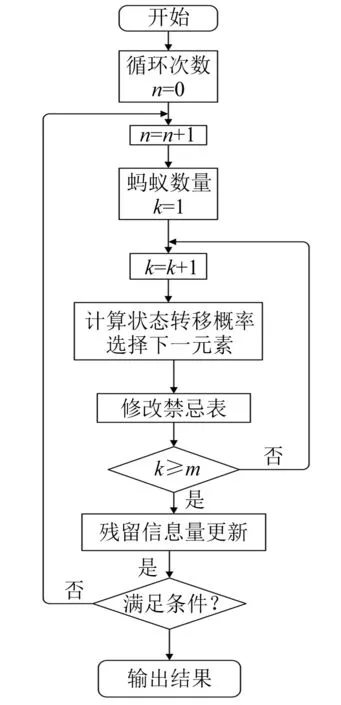
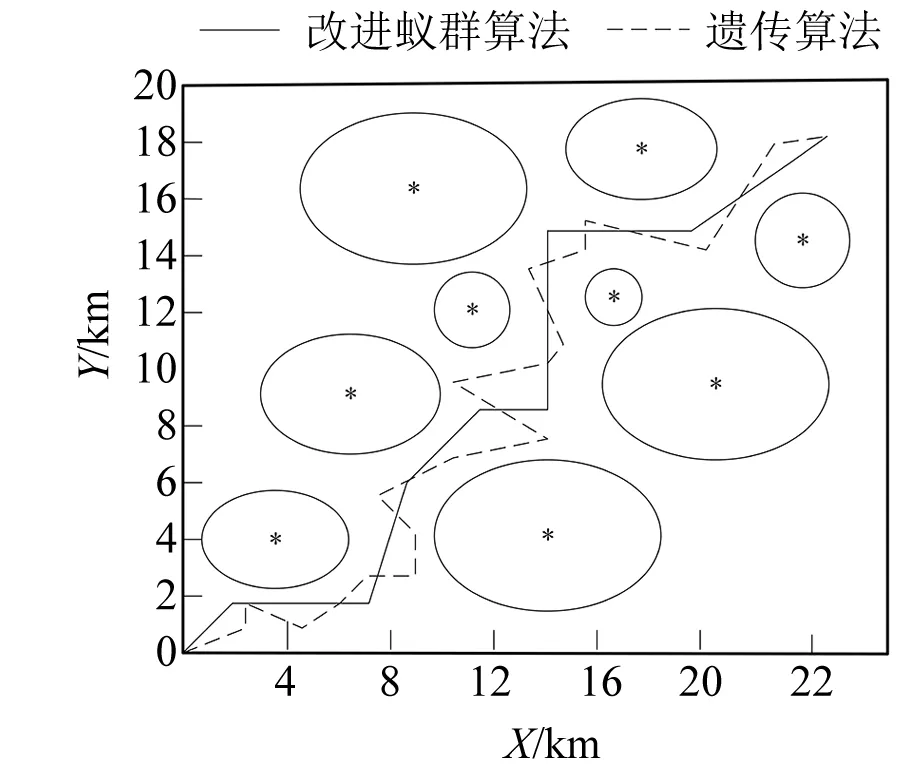
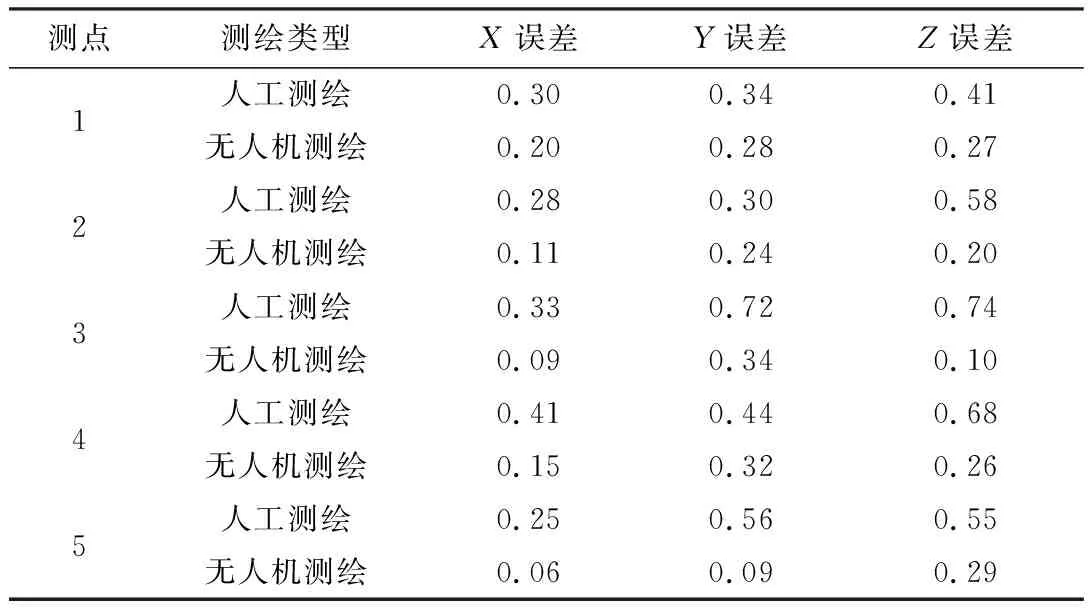
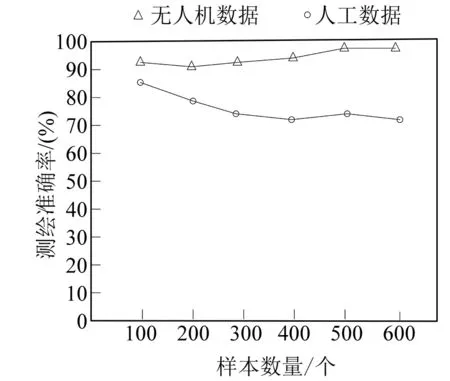
d (1) 式中:d为航线上的点与危险点的距离;Lmin为最小步长。该条件规定了无人机直飞距离。 (2) 偏航角和爬升角 (2) (3) 式中:αmax、βmax分别为无人机的水平最大偏转角度、垂直最大偏转角度。无人机在某时刻的坐标表示为(x1,y1,z1),在下一时刻的坐标表示为(x2,y2,z2)。 (3) 飞行高度 hmin≤h≤hmax (4) 式中:hmax为无人机航线中的最大高度;hmin为最小高度。 (4) 飞行航程 S≤Smax (5) 该条件是考虑到无人机的油量或电量储备条件,必须在预估最长航线内完成任务并返回。 图3 无人机航线三维坐标系 蚁群算法是较为常用的进化算法,可以用于无人机航路的规划。建立一个三维坐标系,将(0,0,0)作为无人机航线的坐标原点如图3所示。 将其划分为若干个小方块,以方块各顶点作为搜索节点,由蚁群算法可得:在某时刻t蚂蚁k由节点i移动至节点j的转移概率公式为: (6) (7) 当蚂蚁对空间中的点周游过后,需要进一步对各个节点的信息素浓度进行调整,调整后的信息素浓为: τij(t+n)=(1-ρ)τij(t)+ρ(Δτij+Δτkij) (8) (9) (10) 式中:ρ为信息素挥发程度,范围为0<ρ<1;Q为正常数;Lk为第k只蚂蚁走过的路径长度。 由此利用蚁群算法对无人机的测绘航线进行设计,蚁群算法流程如图4所示。 图4 蚁群算法流程图 图4中:m为蚁群中蚂蚁的个数;k为蚂蚁个数编号。传统的蚁群算法在无人机航路设计中不仅可能需要较长的搜索时间,还可能只得到局部最优的解,这样的设计结果显然不是最佳航线。因此对限定信息素挥发程度ρ的范围进行限定 (11) 由此可以提高蚁群的全局搜索能力,得到最优的无人机测绘航线。 首先将无人机拍摄图像视为无向图,将特定场景的像素点看作无向图的顶点v,集合为V。由于图像是用二维矩阵存储的,因此在无人机拍摄场景中,所有物体图像的一个像素附近都有8个相邻像素,对像素间相邻边a设置权值w(a),则分割得到的C部分的内部差异为: (12) 式中:A为目标物体图像及其周围相邻的8个像素边a的集合。 两部分区域子集C1和C2的亮度差异为: (13) 若区域子集C1和C2的亮度差异满足: D(C1,C2)≤ (14) 则可以将两部分区域合并为同一个亮度差异D(C1,C2)。 由此可以得到图像中的最小内部差异为: (15) 最终,可得到图像分割结果为: (16) 在超像素图像分割技术的基础上,引入无人机图像的特征描述算子,再利用内核影像技术进行改进,以减小特征图像维数。最后利用欧氏距离找到与特征图像适配的点,对随机采样法得到无人机测绘图像的变化模型进行标定。 为保证图像的旋转不变性,将无人机拍摄图像向主方向旋转,则图像旋转到(x,y)时的梯度值可表示为: g(x,y)=sqr{[S(x+1,y)-S(x-1,y)]2+ (17) 图像旋转到(x,y)时的旋转方向为: (18) 利用内核影像技术进行改进,引入适配的内核函数,由于其中只有+1和-1两个元素,因而可以显著提高图像处理的计算速度,其表达式为: (19) 根据无人机拍摄图像特征点的位置和规模,将图像子块中的所有像素的梯度方向调整为主要方向,由此可以得到各图像子块在各方向上的梯度矩阵为: Mθ(x,y)=sin(g)M0(x,y)+cos(θ)M1(x,y) (20) 式中:M0(x,y)为水平方向梯度;M1(x,y)为竖直方向梯度。再对梯度矩阵进行高斯滤波处理以消除光照变化带来的误差,如式(21)所示。 (21) 式中:σ为无人机采集图像分割子块宽度的1/4。采用欧氏距离对图像特征点进行适配,如式(22)所示。 (22) 式中:Da(i)和Db(i)分别为图像特征点a、b的特征描述算子。 本文选用固定翼Foxtech VTOL垂直起降FH18V无人机进行测绘,搭配A7R相机,最大起飞质量为1.5 kg。硬件环境使用1台U为8核16 G的CP,硬盘容量为512 G,操作系统为Windows10,通过MATLAB 2014软件系统进行图像处理分析比较。 图5 无人机航路规划图 分别使用遗传算法与改进蚁群算法对无人机航路进行仿真模拟,用MATLAB验证两种算法的可行性,比较两种算法下无人机的航行路线的合理性,仿真结果见图5。 如图5所示,虚线为遗传算法飞行路线,实线为改进蚁群算法的飞行路线。由此可以看出,遗传算法的航行路线距离更长,航行代价更大,且距离障碍物距离较近,危险性更高。而本文使用的改进蚁群算法航行路线的安全性更高,成本更低,代价小,航行距离缩短了34%,说明改进后的蚁群算法能够在最短时间内完成测绘任务,证明了算法的可行性。 在验证内核影像技术有效性时采取实地测绘来进行验证,选取多个地形位置高度进行实地人工测绘和无人机测绘,将两种测量结果进行对照,以5个测绘点为例,测绘结果如表1所示。 表1 不同方式下的测绘误差 基于无人机遥感技术的工程测绘结果更加准确,与实际情况相比的误差更小。再对内核影像技术进行验证,增加样本数量,与原有无人机测绘技术进行比较。 随样本增加有下降趋势,最低为78.7%测绘误差较大,会给工程带来隐患。而基于无人机遥感技术的工程测绘准确率随样本数量的增加成上升趋势,准确率在90%以上,准确率最高可达98.6%,如图6所示。 图6 测绘数据准确率对比结果图 本文在图像矫正的基础上,使用超像素图像分割技术对图像进行分割,再使用内核影像技术对图像布局进行标定,使拍摄得到的图像特征更加清晰,极大提高了图像处理效率,减少了测绘工作量,也使得测绘准确率得到了提高。所提应用方案克服了原有传统人工测绘存在的不足,验证了无人机遥感技术在工程测绘应用中的可行性,本方法仍旧存在诸多不足,还需要对无人机测绘其他部分进行改进,有待进一步的研究。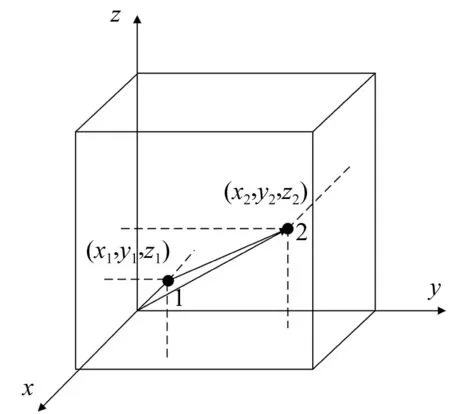
2.2 基于内核影像技术的测绘图像处理

max{I(C1),I(C2)}
[S(x,y+1)-S(x,y-1)]2}3 试验与分析
4 结束语
猜你喜欢
包装工程(2022年11期)2022-06-20
民族文汇(2022年9期)2022-04-13
作品(2021年9期)2021-09-22
北京航空航天大学学报(2021年7期)2021-08-13
现代装饰(2021年1期)2021-03-29
汽车工程(2021年12期)2021-03-08
环境与发展(2019年4期)2019-08-06
中国计算机报(2019年12期)2019-06-21
科学家(2016年13期)2017-09-29
建筑工程技术与设计(2015年12期)2015-10-21
