
空-地融合扫描技术在矿山生态修复中的应用
2022-08-13 07:31于立民杨晶晶
中国新技术新产品 2022年9期
于立民 杨晶晶
(河北省地质矿产勘查开发局第二地质大队(河北省矿山环境修复治理技术中心),河北 唐山 063000)
随着我国生态文明建设的不断发展,矿山生态修复治理达到了前所未有的高度。由于对矿山资源的开采和利用不合理,严重破坏了生态环境。尤其对露天矿山的开采,造成高陡边坡、危岩破碎边坡等复杂地形,存在崩塌、滑坡很多地质灾害隐患,野外调查人员无法近距离测量和调查。随着高新科技的出现,三维激光扫描和无人机航摄独特的优势,被行业人士广泛应用,也成为矿山生态修复治理工作的高效技术手段。
国内外有许多学者针对三维激光扫描或倾斜摄影测量单一技术在测绘领域做了大量的研究,取得了一定的成效。例如张开坤应用地面三维激光扫描仪在城市住宅区域进行大比例尺地形图测量;曹正响将倾斜摄影与地面激光扫描技术融合起来构建三维建模应用于建筑物房顶的研究;黄宣东利用单一无人机倾斜摄影技术对矿山进行生态修复治理。然而将三维激光扫描和倾斜摄影测量技术两者融合起来,在矿山生态修复治理中的应用研究则相对较少。
因此该文以唐山市某露天矿山为研究试验区,利用三维激光扫描和倾斜摄影测量融合技术,对其进行三维重建,获得露天矿山三维实景模型和三维激光点云,将其成果应用于生态修复工作。
1 基本技术思路
三维激光扫描仪可以对测区进行360°全景扫描,并且点云精度高,真实还原地形现状。对地形复杂、地形起伏变化程度大的矿山,由于无人机作业模式的限制,采用单一的无人机倾斜摄影测量技术进行三维重建时,容易造成三维模型产生纹理缺失、模糊、空洞问题,且采集到的点云数据精度相对较低;因此采用三维激光点云与无人机倾斜摄影进行融合建模,取长补短,弥补了常规单一数据源的不足,提高了模型成果质量和精度。
该文研究区为地形条件复杂的露天矿山,采用Trimble SX10三维扫描仪对露天矿山进行远距离扫描,获得三维点云数据,应用无人机系统对研究区进行东、南、西、北、及顶部五个方位的低空数据采集,经过Smart3D平台处理得到空三结果,将三维点云与空三结果融合处理,得到三维实景融合模型,可以精准高效地用于矿山地形图绘制以及后续矿山生态修复规划工作。技术路线图如图1所示。

图1 技术路线图
2 研究实施过程
2.1 地面三维激光扫描
该研究区采用Trimble SX10三维扫描仪,可提供600m扫描测程,360度全域扫描,达到1mm高精度的扫描效果并具有全站仪和高清影像仪的功能。通过定向方式架站后,可实现站与站之间的点云自动拼接,拼接后的精度为定向精度。根据矿山地形起伏现状,将该设备放置研究区合适的位置(图2)。

图2 三维扫描现场图
将照相机调节到合适的曝光度,开始工作后,先自动拍照1min,并自动存储照片和点云数据,每站扫描时间大概3min完成,再将其换到下一站,继续进行扫描工作。
在进行三维扫描作业时,由于人、车流以及不可避免的外界因素会对扫描结果数据产生干扰,为提高数据的准确性,需要对原始数据进行点云预处理。点云预处理直接影响到三维点云的精度,不少学者对点云预处理方法做了大量研究,大概分为数学形态学、基于先验信息、基于坡度和半自动的滤波方法。这几种方法有各自的适应范围和局限性,根据三维激光扫描对象所特有的结构,选择半自动滤波方法。首先统计点云数据的范围值,然后再设定阈值,将悬空的噪声点、人以及障碍物遮挡所产生的离群点加以剔除(图3);不能自动剔除的噪点需要手动建立围栅,加以剔除。

图3 去噪过程图
基于多判别参数为基础的点云特征提取算法,确定特征判别参数和特征阈值,提取出点云特征点。对点云进行基于八叉树的K-means聚类操作,将矿山地形地貌数据分成植被与非植被,然后在不包括特征点的聚类中以距离聚类中心最近的数据点代替整个聚类,保证点云完整的同时达到抽稀的目的,在此基础上剔除地表覆盖的植被。
2.2 倾斜摄影建模
该研究区采用飞马无人机对露天矿山进行航拍,航拍技术参数见表1。为保证倾斜摄影测量成果与研究区的坐标系一致,需要对研究区布设控制点,像控点形状为“L”形,检查点为十字型。
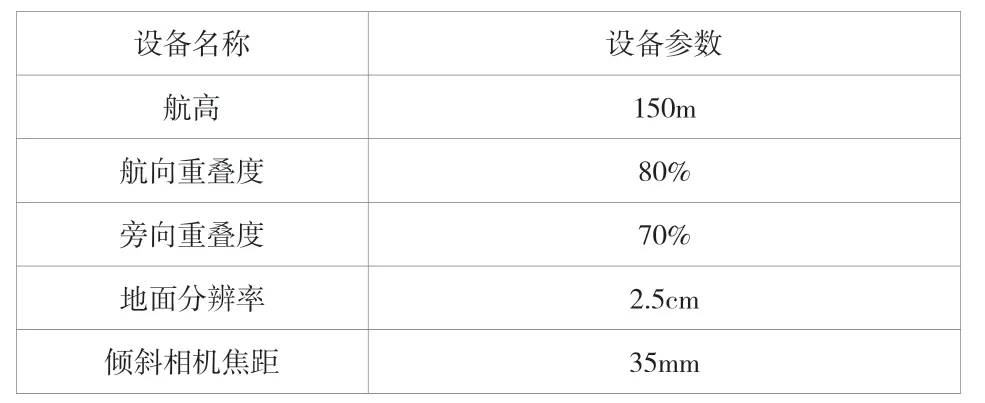
表1 倾斜摄影测量主要技术参数
原始数据合格后,进行数据预处理,包括影像匀色、POS数据坐标转换等。运用ContextCapture平台对预处理后的数据进行集群计算处理,基于严格的光束法区域网平差解算模型,通过计算导入的控制点和判刺的控制点之间的偏差,统计点位残差,进行严格的空三加密处理。空三处理结束后,查看空三解算结果。该试验空三精度满足生产的质量要求。
2.3 融合建模
将三维激光点云转成*.las格式,在ContextCapture平台中,选择 pointcloud模式,参数设置成静态三维激光扫描数据并转换成统一坐标系,确保三维点云与空三成果正确套合,并运行项目重建模块,在此基础上构建三角网并自动映射纹理,最终生成高精度三维实景模型。在研究区选取7个特征点,将实测控制点添加到三维模型中,并将两者进行比较,结果见表2。

表2 检核点平面与高程误差(单位:m)
中误差是评价研究区三维模型的水平精度和垂直精度的有效指标。利用中误差公式计算该研究区的平面的中误差为1.88cm和高程中误差为1.67cm。精度符合《三维地理信息模型数据产品规范》(CH/Z 9015-2012)。且三维模型纹理、色彩和质量更加优化(图4和图5)。

图4 融合后模型近景图(一)
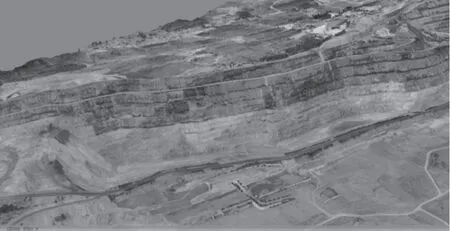
图5 融合后模型远景图(二)
3 应用分析
矿山生态修复治理是践行绿色发展的体现。涉及土地复垦、高陡边坡精准防治、地形地貌治理等。基于三维激光扫描和倾斜摄影测量融合技术获取的实景三维模型、三维点云数据、正射影像,可快速提取生态修复关键要素,为矿山生态修复规划设计工作提供数据支撑。
3.1 复垦设计应用分析
该文将矿区DOM和三维模型导入EPS软件中作为设计底图并进行人机交互解译。将采坑、道路、植被、复垦治理区等生态修复关键要素矢量化勾绘出来,形成矿区地形图。在此基础上叠加土地利用现状图,提取矿区范围内植被和土地类型,判定表土区域剥离情况,评估土地损毁范围,制作土地损毁现状图、预测图以及土地复垦规划图,叠加底图DOM,推进土地复垦设计工作。
3.2 高陡边坡防治应用
矿山地形坡度代表了地面高程变化率。在对露天矿山进行生态修复工程中,需要对边坡进行消坡,放缓边坡的坡率,以增加坡体的稳定性,可消除存在的地质灾害隐患。将矿山三维激光点云数据加载到Arcgis软件,使用3D Analyst工具将三维点云数据转成栅格数据,在此基础上利用坡度分析和重分类工具,将坡度分为四类,可直观地看到各类坡度的分布情况(图6),结合高质量的三维模型判定边坡高度,依据边坡治理技术形成安全边坡,改善区域边坡景观。
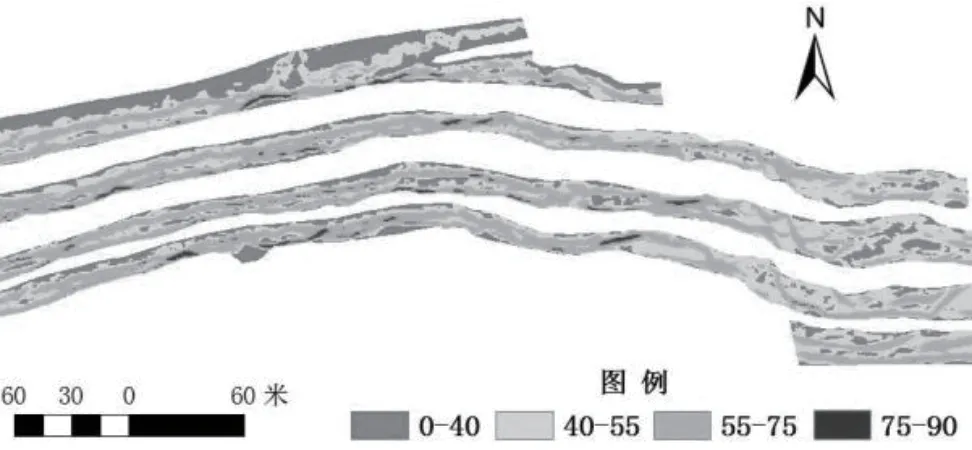
图6 坡度重分类局部图
3.3 土石方测算
土石方测算是露天矿山生态修复工程中的一项重要内容,对工程预算、工程项目规划设计等方面起关键作用。利用土石方大师软件,基于处理后的三维激光扫描点云数据和实景三维模型,设定参数,通过创建TIN模型(图7),可以快速计算、统计和汇总土石方量,用于土地整治设计和指导施工。
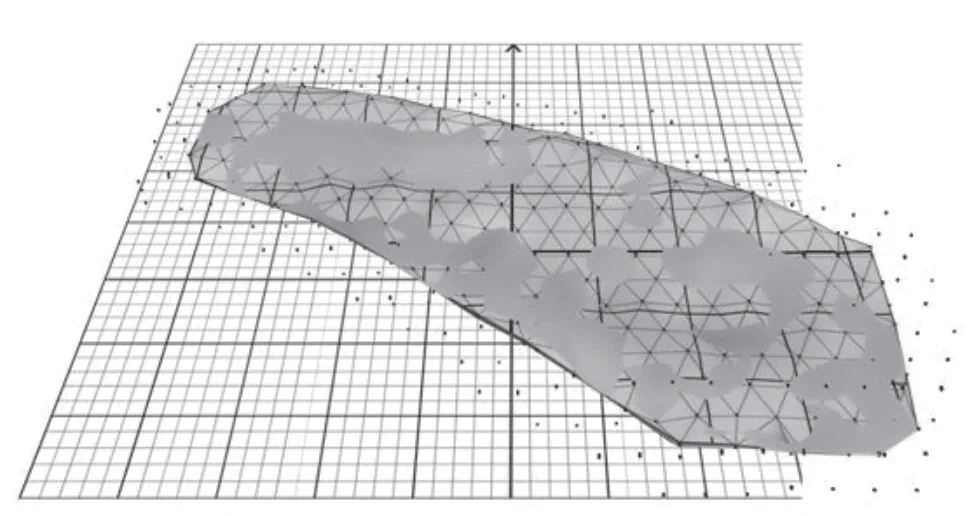
图7 土石方测算三维图
4 结语
结果表明,将三维激光扫描和倾斜摄影测量进行融合,生成实景三维模型成果,有效改善了模型质量。基于高精度的三维实景模型和三维点云,制作矿区地形现状图、坡度图和测算填挖方量,可直观地了解矿区地形地貌,为土地损毁防治、高陡边坡防治和土地整治工作,提供了丰富的基础资料,为矿山生态修复提供了有力的决策支持,大大减少了外业工作量和野外工作隐患,提高了工作效率。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
有色金属(矿山部分)(2021年4期)2021-08-30
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
电子乐园·上旬刊(2021年8期)2021-05-16
华人时刊(2021年23期)2021-03-08
矿产勘查(2020年7期)2020-12-25
北方音乐(2017年4期)2017-05-04
中国煤炭(2016年9期)2016-06-15
