无人船巡河在河长制中的应用分析
2022-08-11 02:47彭秋伟文林森钱镜林
浙江水利水电学院学报 2022年3期
彭秋伟,文林森,钱镜林
(1.共青团浙江水利水电学院委员会,浙江 杭州 310018;2. 浙江省钱塘江管理局勘测设计院,浙江 杭州 310016;3. 浙江水利水电学院 水利与环境工程学院,浙江 杭州 310018)
河长制成功使过去的“九龙治水”、令出多门,变成现在的党委政府统筹多部门治水,扭转了地区分割、部门分治的状况,统筹“山水林田湖草”各种要素,兼顾河湖上下游、左右岸、干支流,开创了协同治水新体制,形成了系统治水新局面。河长巡河履职能够对河道问题早发现、早处理、早解决,是全面落实河长制的首要抓手。传统巡河工作时间长、效率低、成本高,部分地方人工巡河无法到达甚至还容易发生某些危险,这些痛点一直萦绕着巡河工作。随着生态环境与城市治理进入攻坚战阶段,对水域治理精准化、精细化要求不断提升,河长巡河工作的重要性加强、工作量大幅增加,这进一步倒逼传统巡河方式变革[1-4]。
无人船是一种可以无须实时遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人。通过内置精准度厘米级的卫星定位系统,搭载水质检测设备、测扫设备,多波束对指定区域进行水质检测、水下地形测绘、水平面以下暗管测扫、经纬度坐标定位等[5-6]。无人船载高密度水质分析监测设施可以完成实时水质监测,通过连续的水质分析结果判断水质污染、污水排出等问题,已有逐渐取代单点取样分析的传统水质监测模式的趋势。根据《浙江省深化“五水共治”碧水行动计划(2021—2025 年)》提出的坚持整体智治,推进科学治水,强化治水新技术应用,进一步推动治水从传统治理向智慧治理转变等要求,探索无人船巡河能否作为河(湖)长履职工作创新方式极为必要。
1 无人船技术原理
本次研究采用型号为C120X全光谱法水质监测无人船,利用GPS进行定位和导航,通过船载多种光谱传感器及辅助设备实现对水质的自动采样和多参数测量,同时利用无线通信实现对无人船的远程操控以及数据传输,无人船工作操作流程如图1所示[7]。船体构成包括动力系统、供电系统、主控系统、通讯系统、导航定位系统、地面基站系统、水质分析系统、自动采样系统,关键技术指标如表1所示。
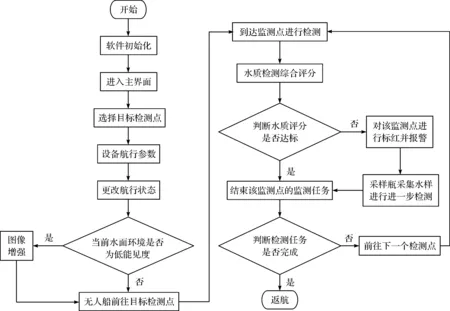
图1 无人船工作操作流程
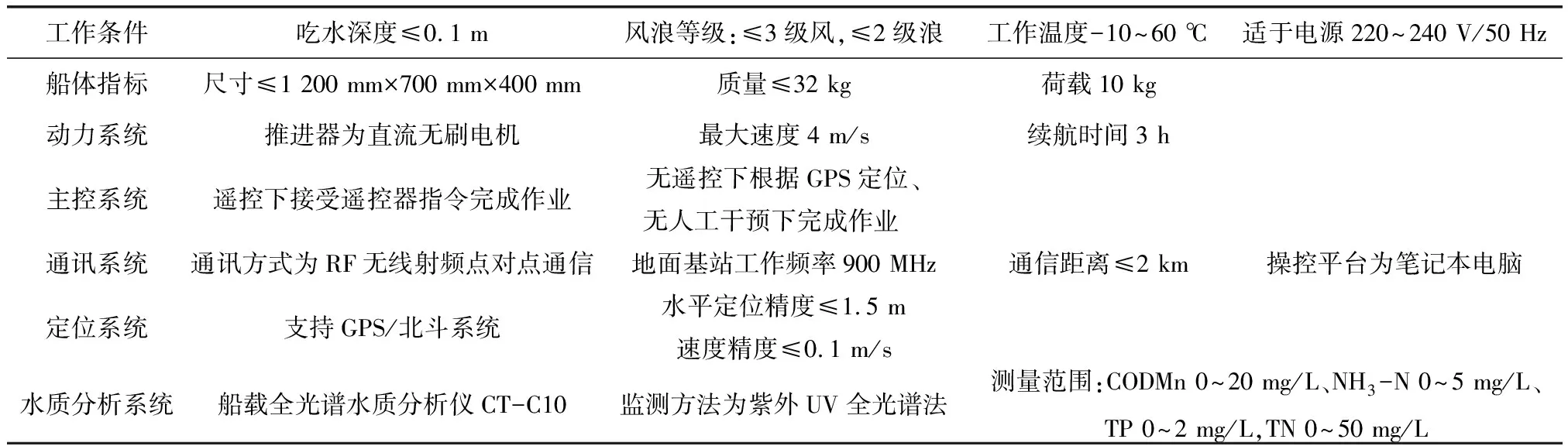
表1 全光谱法水质监测无人船关键技术指标
2 无人船走航与人工采样水质检测对比
2.1 研究方法
利用无人船载水质监测传感器及视频摄像头,在相关流域典型河道内间隔一定距离进行水质现场取样,对化学需氧量(COD)、溶解氧(DO)、氨氮(NH3-N)、总磷(TP)等4项指标进行水质监测,根据数据变化分析查找疑似污染源等问题。
在无人船走航发现的水质异常点位处进行人工水质现场取样,选取《地表水环境治理标准(GB 3838—2002)》评价标准表1中除水温、总氮、粪大肠菌群以外的21项指标,由相关专业监测机构出具相应的指标监测报告,其中对水样数据进行评价,按照COD、DO、NH3-N、TP等4项指标中最差的指标类别认定水质类别。
对比分析在两种不同的水质监测方式下,COD、DO、NH3-N、TP等各项指标的差异性,以此分析判断无人船巡河的精准性及实用性。
2.2 研究区概况
楠溪江,古名瓯水,浙江省东海独流入海河流瓯江的第二大支流。发源于永嘉县、仙居县交接的黄里坑,自北而南,流经永嘉中心腹地,直注瓯江,干流总长140 km,流域面积约2 490 km2,上中游平均河宽50 m,河道平均坡降7.4%,平均年径流量2.85×1010m3。本次无人船走航范围为楠溪江河道金溪镇至瓯江汇合口处(图2),总长度约40 km。

图2 楠溪江河段巡河范围
2.3 无人船沿程走航及问题点1自动采样监测水质指标数据
无人船沿程完成了近40 km,883个点位的COD、DO、NH3-N、TP采样监测,相关监测数据实时传输到系统,系统自动生成水质参数分布图(图3)。其中沿程有2处点位水质参数NH3-N、TP数值发生严重突变。笔者只选定问题点1开展研究分析,其他问题点暂不作讨论。问题点1的各项指标具体数值见表2。

图3 无人船沿程采样监测COD、DO、NH3-N、TP变化情况

表2 问题点1附近相关数据自动监测值
2.4 问题点1人工采样水质检测指标
根据无人船走航自动采样上传的水质监测数据变化,分析查找疑似污染源等问题点1位置,在该点位现场进行人工水质取样,并委托权威机构对人工采样进行水质指标检测,得到问题点1相应的指标检测数值(表3)。
由表3数据可知,在问题点1附近,无人船水质监测数据最差情况为TP为0.412 9 mg/L(劣V类水),NH3-N为2.35 mg/L(劣V类水),COD、DO均为Ⅰ类水。而人工检测水质数据最差的TP为0.774 mg/L(劣V类水)、NH3-N为3.47 mg/L(劣V类水)、COD为32 mg/L(V类水),船载水质数据均低于定点水样抽查的实验室数据,整体上数据有偏差。
问题点1位于瓯江汇合口处,从卫星地图上可知该区域周边存在大量居民区,可能存在生活污水排放至江中的情形。现场结合无人机视频拍摄结果,在此区域河道周边存在大量菜地,在耕种过程中可能存在肥料入河造成指标突变情况。无人船水质监测数据能客观反映河道沿程水质整体变化趋势水平,并发现水体浑浊、水质突变等疑似问题,通过将实验室数据与无人船走航实时监测数据进行对比发现,在实验室数据检测水质有异常的采样点周围,无人船走航监测亦可反应异常状态,因此,船载水质数据可作为疑似问题的技术线索,供有关部门内部参考使用。
3 无人船巡河优势及存在问题
3.1 优 势
1) 无人船搭载全光谱水质分析仪监测pH、NH3-N、TP、DO等水质指标,采用光学原理实现水质分析,没有任何试剂的消耗,绿色环保,不会对水环境造成二次污染。
2) 无人船具有体量小灵活,对不同流速河流适应性良好,降低人身安全风险等优点,适合开展复杂水域采样监测,是传统采样监测的有益补充。全光谱法无人船水质监测频率可达30 s/组数据,反应迅速,可有效提升监测效率。尤其在部分河道流速较大的情况下,优势非常明显,可以高效地进行河道水质监测。
3) 引进涵盖水质采样、监测、暗管排查、现场录像等功能的多个系列无人船开展综合调查,可以克服传统人工排查工作中普遍存在的排污口数量多、工作效率低、排口精准定位难、人工采样监测受外因影响严重、人工排查安全隐患明显等方面的不足与困难,满足了对入河、海排污口全面监测、精准治污的要求。
4) 为打破传统人工采样密度稀疏、定期监测的局面,可通过将人工采样定期监测, 国控、省控站在线监测和无人船巡航监测相结合的方式,构建网格化水质监测体系,提升监测密度。打破传统预警监测数据长期处在事后监测的状态,在实际使用过程中实时发现水质异常,及时通过手机客户端以及电脑客户端预警。
3.2 存在问题
1) 本次巡河工作,无人船只在河道内的走航方式为单向一次式走航,由于船只体积小,水质传感器检测覆盖面很小,尤其是对于宽度较大的河道。覆盖面小的话,对于问题的发现就比较片面,可能存在很多问题检测不到的情况,造成巡河结果的片面性和不完整性。就巡河过程来看,若要对河道水质问题做到全面覆盖巡查的话,需要针对河道进行全覆盖式走航,但这种方式巡河的工作量会大大增加,并不适合多条、跨区域、长距离的河道。
2) 无人船在巡河水质检测的过程中,很容易碰到安全问题。由于船只体积较小,在河道中由于风浪的原因容易被水波打翻,或在河道中遇到水草、铁丝网等不确定因素可能造成船只受损无法进行水质测量的情况,严重的情况下可能会造成船只损毁甚至沉没的后果。
3) 当前无人船自动监测的水质数据指标种类以及数据的准确性与传统的人工采样实验室检测还有一定的距离。因此,无人船巡河并不适合需要精确水质数据的作业。但是无人船巡河能够监测常规的几项水质指标数据,并且其变化趋势与实验室检测的相吻合,较传统的人工巡河方式已经有较大的改善。
4 结 论
通过无人船巡河可以实时掌握水质情况,及时发现污染源位置,配合无人机视频影像能够直观、有效地发现问题。一方面可以提高巡河的精准性,真正发现河湖中存在的水质问题;另一方面,可以以智能代替人工,减轻基层河(湖)长的负担。使用无人船巡河是河(湖)长履职工作方式和方法的一种创新,符合新时期以问题为导向的河长制工作模式,也是推进科学治水,强化治水新技术应用,促使河长制从“有名”向“有实”转变的继续深化,促进河湖治理体系和治理能力现代化建设的关键步伐。
猜你喜欢
星火·中短篇小说(2022年1期)2022-01-07
区域治理(2021年53期)2022-01-01
建材发展导向(2021年14期)2021-08-23
军民两用技术与产品(2021年2期)2021-04-13
皮革制作与环保科技(2020年14期)2020-03-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
作文周刊·小学二年级版(2018年21期)2018-09-06
法制与社会(2018年7期)2018-04-19
岷峨诗稿(2017年4期)2017-04-20
科学大众(中学)(2016年8期)2016-05-14