智能巡检机器人在大坝廊道运维中的应用
2022-08-11 05:53王波,赵远,刘喜泉,曹仲,李剑波
人民长江 2022年7期
王 波,赵 远 ,刘 喜 泉,曹 仲,李 剑 波
(1.向家坝水力发电厂,四川 宜宾 644600; 2.中国三峡集团有限公司 科学技术研究院,北京 100038; 3.长江生态环保集团有限公司,湖北 武汉 430070; 4.中国长江电力股份有限公司,湖北 宜昌 443002)
0 引 言
近年来中国的水电建设事业得到了飞跃发展,金沙江水电基地的溪洛渡、向家坝水电站已经成功投入运行,乌东德、白鹤滩水电站也即将全部投产[1]。向家坝水电站是金沙江下游河段四大水电梯级中的最后一级,安装有8台800 MW水轮发电机组。为了确保向家坝水电站大坝安全,需要对坝基廊道进行长期巡检。但坝基廊道环境复杂、线路冗长,且廊道内存在墙体渗漏、地面积水、有害气体聚集等多种不确定因素,极大增加了维护人员的巡检风险。此外,人工巡检费时费力,也容易导致漏检,因此实时掌握大坝廊道环境状况,及时发现廊道内设备运行隐患,研发智能巡检机器人成为首选解决方案[2-3]。本文通过探究轨道式巡检机器人在坝基廊道的具体应用,提出了采用智能机器人代替人工巡检的设计方案。
1 系统简介
向家坝水电站廊道智能诊断系统是多传感器融合技术、视觉识别技术、视频安防技术、计算机云平台技术的有机结合,实现大坝廊道的日常巡检和数据采集。通过在廊道顶部敷设轨道和引入智能巡检机器人,对大坝廊道进行动态巡检和在线监测,实时诊断廊道内的设备运行状态。巡检机器人以智能诊断平台为基础和核心,数据传输采用 TCP /IP 综合数据网络与WiFi无线信号网络相结合的高速网络系统,实现远程监测、故障报警、联动控制和集中管理的目标[4]。智能巡检机器人系统构架设计如图 1 所示。

图1 智能巡检机器人系统构架设计Fig.1 Design of inspeotion robot’s system frame
2 系统设计
2.1 巡检机器人
智能巡检机器人采用防爆、防腐、防水车体设计,可沿高强度铝合金轨道往返运行,实现大坝廊道的现场巡检,完成应急处置工作。智能巡检机器人主要由控制中心、驱动装置、挂载系统三大部分组成,巡检机器人如图2所示。
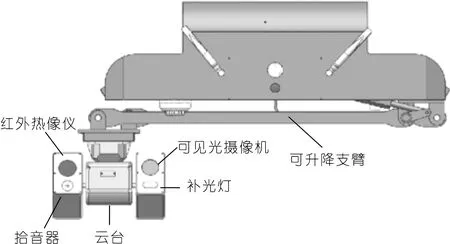
图2 巡检机器人示意Fig.2 Schematic of inspection robot
控制中心负责巡检机器人水平行走和大角度爬坡,进行防碰撞传感器、水平行走高精度定位条码和各种在线传感器的实时数据采集。定位检测系统由工业条码标签与高精度条码扫描仪组成,定位精度可控制在1 cm以内。
驱动装置是智能巡检机器人的动力核心,由主、从行走机构及限位装置构成。驱动电机具备“S”曲线加、减速缓冲功能,克服了传统电机加速突变及启动冲击的缺点。巡检机器人水平方向行走采用双步进电机驱动,最快移动速度可达20 m/min,适用于需要较长巡航路径的工作环境。方案设计中,按每3 000 m廊道配置1台巡检机器人,可对廊道环境状态实现连续、高效的动态数据采集。
巡检机器人配置有垂直升降云台机构,垂直升降距离可达1 m,云台支持水平360°旋转,垂直90°~-90°动作,全面监视巡检区域[5]。车载传感器采用模块化、可扩展的设计方式,支持在线更换传感器,实现视频监控与图像识别、红外成像与火灾预警、语音对话等功能[6-7]。另外,根据现场需求特别配置了O2、CO、H2S、CH4气体传感器,实现对廊道气体环境的实时监测[8]。
巡检机器人行走速度可实时调整,具备超声避障功能,并设计了多重安全防护。巡检机器人自动行走过程中,在40 cm范围内遇到障碍物时能主动停止移动并报警,当障碍物移除后能自动恢复行走。巡检机器人可通过导航地图设定移动范围,并在轨道两端安装机械限位块防止脱离轨道。巡检机器人具备软启动行走功能,上下斜坡及转弯时减速运行,完成后恢复设定速度直线运行。
2.2 机器人轨道系统
机器人沿悬挂轨道行走,采用双步进电机驱动,爬升功能采用在轨道上敷设辅助链条实现[9]。轨道基体采用高60 mm、宽60 mm的标准铝型材,表面阳极氧化,可根据现场安装要求灵活切割成0.3~3.0 m长度。轨道安装在向家坝水电站左消力池底板排水廊道顶部,廊道断面为城门洞型,选取两纵一横的典型廊道结构,轨道总长206 m(见图3)。A、B、C、D段为廊道直线段,在廊道E段设置有约3 m长、坡度为45°的爬坡轨道,廊道剖面尺寸1.9 m×2.4 m(宽×高),上侧布置电缆桥架,底部设置排水沟槽。
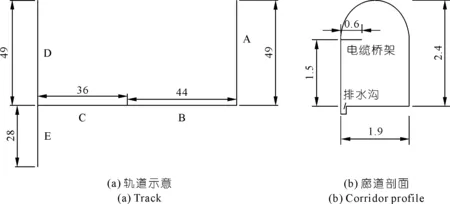
图3 廊道结构(单位:m)Fig.3 Corridor structure diagram
向家坝水电站大坝排水廊道通过干支结合形成系统管廊,存在众多“T”字型接口和“十”字型接口,在以上路口均设置变轨装置,当巡检机器人行走至分岔路口时,变轨装置将不同方向的轨道进行连接,完成分叉路的转换。由于廊道中存在长距离大坡度轨道,因此额外研发了辅助装置帮助机器人提升爬坡能力。
2.2.1轨道交叉点变轨
变轨装置采用旋转式变轨方式,由控制箱、变轨机构、变轨电机和传感器组成。适用于“T”字型、“十”字型、“米”字型等多种接口的交叉变轨。当巡检机器人行走至变轨装置中部时,变轨PLC接收到系统发送的变轨命令,变轨电机驱动携带巡检机器人的导轨旋转90°,由横向轨道变为纵向轨道完成变轨动作[10-11]。控制系统采集变轨完成信号,通知巡检机器人继续巡检,变轨装置如图4所示。
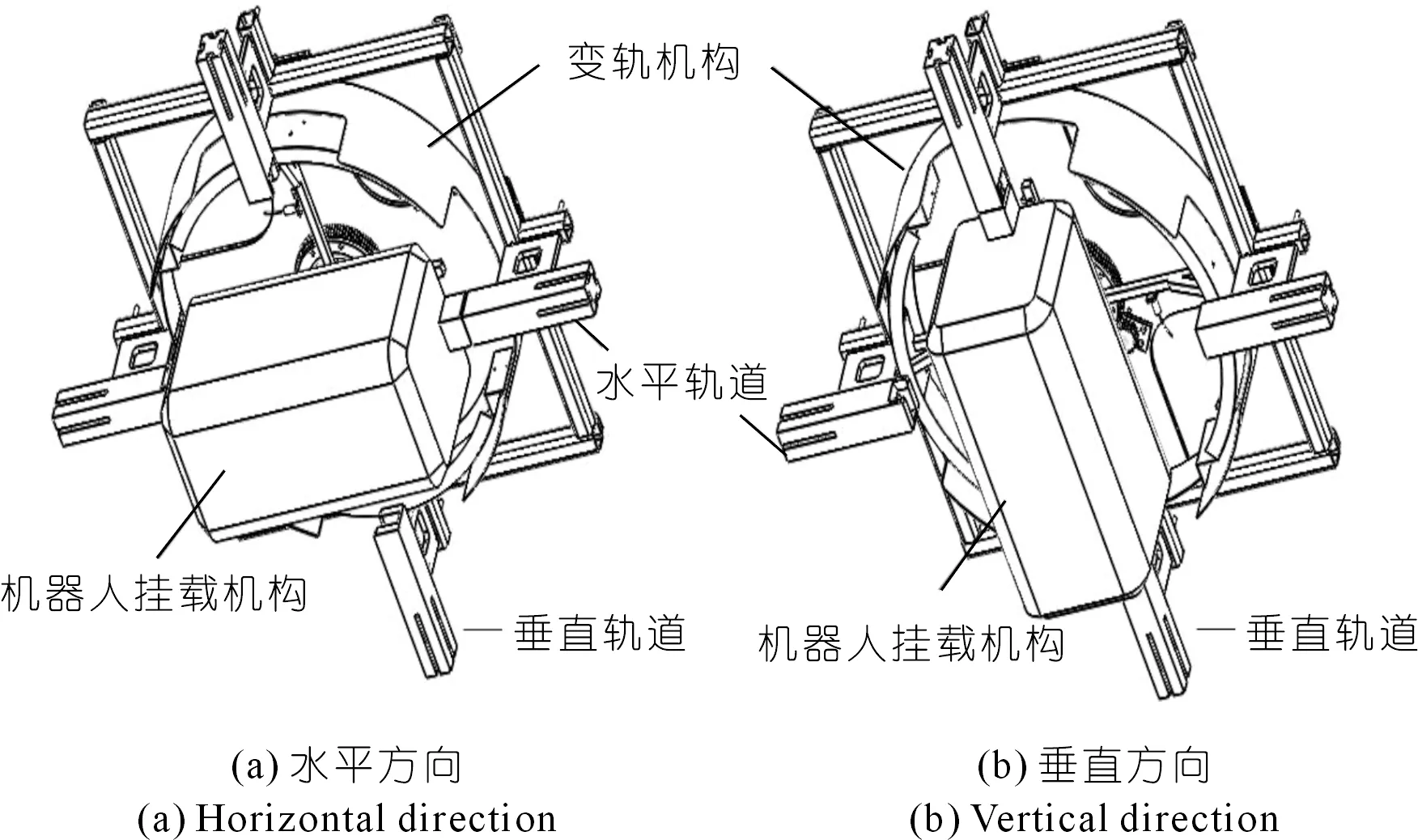
图4 变轨装置示意Fig.4 Schematic diagram of rail changing device
2.2.2巡检机器人45°爬坡
在大坡度轨道两侧铺设辅助链条,机器人在长距离爬坡时,采用滚动轮与链条轮联合驱动的方式为行走轮提供爬坡动力,并在轨道底部及两侧各布置导向轮,防止机器人走偏和倾翻。在水平及小坡度行走区域,机器人仅靠滚动轮完成行走,巡检机器人爬坡原理如图5所示。
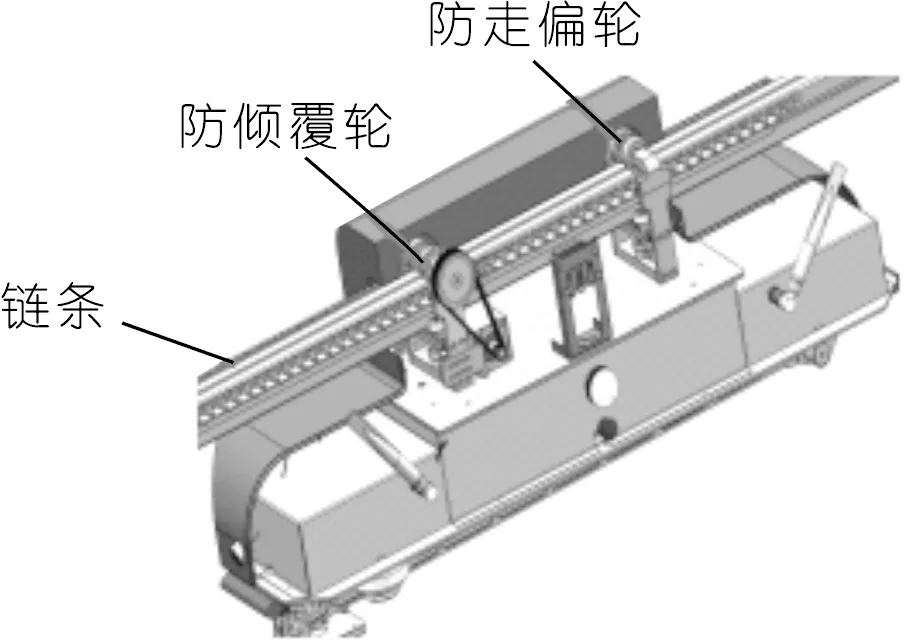
图5 机器人爬坡装置Fig.5 Climbing device of robot
2.3 廊道智能诊断系统
廊道智能诊断系统包括实时监控、任务管理、巡检分析、用户设置、系统维护六大功能模块。诊断系统具有智能巡检和智能分析功能,对廊道环境信息、设备运行状态、人员作业情况等进行实时监视,完成自动巡视、定点拍照、循环录像等智能识别,实现火灾探测报警、气体浓度采集、墙体渗水监测、排水沟水位识别等智能分析。廊道智能诊断系统可通过网络隔离后接入电站视频监控系统,实现电站运维人员和巡检机器人的远程信息交互;同时能通过手机、平板等移动终端APP对巡检机器人车体、云台、摄相机进行远程操作,实时监视廊道环境,获取巡检机器人工作状态[12-13]。廊道智能诊断系统如图6所示。
2.3.1廊道水位识别技术
排水沟水位图像识别算法采用C++语言编程,由于巡检机器人在行驶过程中存在位置偏差,导致摄像机框选位置产生偏差,需利用匹配技术对水位标尺进行精准定位,消除机器人位置偏差对目标的干扰,确保识别过程中位置、角度、参数高度一致。将匹配到的结果图截取后进行色调转化,完成颜色(LUV、HSV)通道分离,转化成黑白二值化图像,再通过分析二值化图像轮廓,形成识别模型提取水位标尺刻度[14]。廊道排水沟水位识别结果如图7所示。
2.3.2墙体裂缝识别技术
通过对墙体裂缝图像进行高斯背景建模,利用背景检测技术提取裂缝,对提取的裂缝进行轮廓分析,计算出轮廓大小并保存到历史数据库。采用预置点进行图像特征匹配,实现对墙体裂缝检测以及裂缝大小趋势分析。墙体裂缝图像识别如图8所示。

图8 墙体裂缝图像识别Fig.8 Recognition of wall cracks image
2.3.3火灾事故预警技术
由于廊道内安装有电缆桥架,故存在电缆火灾风险。巡检机器人搭载了烟雾传感器和红外热像仪,对所需测温设备进行温度扫描和热成像图片采集。智能诊断系统获取红外图像特征信息,提取目标图像实现对廊道内设备的温度识别。当采集的温度超过设定阈值时,由智能诊断系统后台软件生成报警信息,实现火灾事故预警。
2.3.4有害气体检测技术
大坝坝基廊道内存在多种气体,特别是H2S和CH4容易局部聚集,对员工职业健康和安全生产危害极大,也是巡检机器人的重要监视对象。巡检机器人搭载多传感系统对廊道内环境特征数据进行监测,传感系统包括O2、CO、H2S、CH4等气体传感器。
3 附属设备
3.1 通信系统设计
在廊道内,每隔200 m布置一个支持快速切换的无线基站,巡检廊道内安装2个无线AP装置,实现巡检机器人车载系统与智能巡视诊断系统全覆盖、无间断漫游通信[14-15]。2个无线AP装置漫游转换平均时间为35 ms,为系统数据交互提供了大于60 Mbps的有效带宽,每个无线AP装置通过光纤与智能巡视诊断系统主交换机连接,可以保证视频、音频等各类数据实时可靠传输。巡检机器人通信系统如图9所示。

图9 巡检机器人通信系统Fig.9 Communication system of inspection robot
3.2 电源系统配置
巡检机器人采用内置DC24V锂电池供电,在轨道的巡检起点和终点分别设置分布式无线充电装置给巡检机器人锂电池充电[16]。无线充电装置采用AC220V供电,具备浪涌保护功能。当巡检机器人检测到锂电池电压低于额定电压30%时,巡检机器人自动返回最近的无线充电点进行充电,充电完成后继续开展巡检作业。无线充电装置采用大功率电磁感应快充技术,最大充电电流10 A,充电距离4~15 cm。无线充电装置具有过充保护功能,电池充满后自动关闭充电电源。电源系统如图10所示。

图10 巡检机器人电源系统Fig.10 Power system diagram of inspection robot
4 结 语
将智能巡检机器人应用在大坝廊道巡检中,不仅具有传统人工巡检的灵活性,而且能够有效降低巡检人员的劳动强度。廊道智能诊断系统采用机器视觉算法、智能控制、大数据分析等人工智能技术,对巡检机器人携带的高清摄像头、红外热像仪采集的图像信息与多种传感器采集的数据信息进行有效融合,通过智能化深度学习后实现墙体裂缝识别、廊道水位检测、火灾事故预警、有害气体检测等智能诊断功能。廊道巡检机器人的成功研发和应用,为无人值班(少人值守)水电站运行提供了坚实基础,也为水电站开展智慧大坝建设进行了有益探索。
猜你喜欢
社会科学战线(2022年6期)2022-08-25
资源导刊(2020年5期)2020-06-12
浙江林业(2017年8期)2017-11-13
西部大开发(2017年7期)2017-06-26
现代商贸工业(2017年1期)2017-03-28
电子技术与软件工程(2016年16期)2017-03-17
科学与财富(2016年28期)2016-10-14
太空探索(2016年12期)2016-07-18
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2016年3期)2016-05-18