基于全景影像的引水隧洞结构缝检测方法及应用
2022-08-11 05:52崔金良,张俊文,万雷,李志鹏
人民长江 2022年7期
崔 金 良,张 俊 文,万 雷,李 志 鹏
(1.南水北调中线干线工程建设管理局 河南分局,河南 郑州 450046; 2.长江水利委员会 陆水试验枢纽管理局,湖北 咸宁 437300; 3.长江空间信息技术工程有限公司(武汉),湖北 武汉 430010)
0 引 言
南水北调中线穿黄隧洞工程全长4.25 km。该工程在检修排查过程中发现结构缝顶拱原喷涂聚脲普遍存在凹凸、褶皱现象,且内凹处基本已经开裂、破损,必须及时对结构缝进行精准维护,提高防渗效果[1]。由于检修工作量大、工期紧,这就对如何快速、全面获取结构缝空间信息从而为精准维护提供技术支撑提出了迫切需求。
国内外鲜见针对引水隧洞结构缝检测的相关研究。虽目前已有一些对于铁路、公路等大型隧道衬砌裂缝检测技术的研究[2-4],但该类研究主要在大范围探测发现裂隙,然后使用专用量测设备针对局部亚毫米、毫米级的裂缝进行量测。另外一种采用立体摄影测量方式进行量测[5-7],这种方式对影像采集技术要求较高,拍摄方式复杂,需要布设控制点进行解算,操作和数据处理比较复杂、精度有限,且通常集成设备庞大,难以携带。
引水隧洞相比其他日常运行的公路、铁路等隧道检测条件限制更多,大型检测设备不便进入,且隧洞内供电、照明条件差。目前,国内外对于引水隧洞结构缝的测量没有数字化的测量和分析专用设备,主要还是通过人工使用标尺测量的方式来进行。该方式需要大量的人工,且测量不易实现,需要借助台车等大型机械工具,更是加大了测量的难度,降低了检测效率,提高了检测成本,增加了安全风险。而引水隧洞维护工期紧,且需要与实际施工紧密结合,急需针对引水隧洞结构缝检测研究轻便的非接触式测量设备和工艺流程,提高效率。普通数码相机在工程形变及缺陷监测等领域应用日益广泛[8-9],是一种比较简便、可操作的方式,适宜应用于限制条件较多的引水隧洞检测。
本文提出的基于全景影像的引水隧洞结构缝检测方法是一种非接触式结构缝检测新方法,可以通过获取结构缝的高清影像,从而对结构缝进行准确、高效、直观的空间信息量测和表达。该方法克服了现有引水隧洞结构缝检测方法耗费人工量大、操作复杂、效率低、难度大、成本高、安全风险高的缺点。
1 全景摄影测缝硬件系统集成
本文从近景摄影测量原理出发,结合该隧洞工程的实际规格、尺寸,以及结构缝的形状、缝宽等特征,确定硬件集成的总体方案。利用 CCD 图像采集和图像处理技术等光电技术实现结构缝图像采集,精准测定结构缝空间信息。硬件集成系统必须达到下列要求(见图1):

图1 全景摄影硬件集成系统Fig.1 Integration of hardware system for panoramic photography
(1) 要能够实现相机的参数设置功能,可以根据理论推算和实际的检测情况,对相机的参数进行调整,以满足不同应用需求。
(2) 多功能云台需具备参数化设置、自动化运转功能,具有智能驱动相机拍照、远程遥控等功能。
(3) 光电设备需与智能便携设备实时连接,可建立图像实时传输,及时监测图像清晰度、是否有遮挡等情况。
(4) 配套照明系统对检测过程进行照明,要求照明效果好,光线要均匀。
(5) 集成系统的图像分辨率要求至少0.5 mm。
(6) 集成连接组件需要可调节安装角度,具有适应性强、稳定性好、牢固可靠的特点,还需要易于安装和便于携带。
基于以上集成要求,本文提出了一种基于全景影像的引水隧洞结构缝检测装置,如图2所示。结构缝检测装置集成在专用脚架上,结构缝检测装置包括图像采集模块、智能云台控制模块、无线通讯模块、辅助定位模块、投线模块和补光模块等。
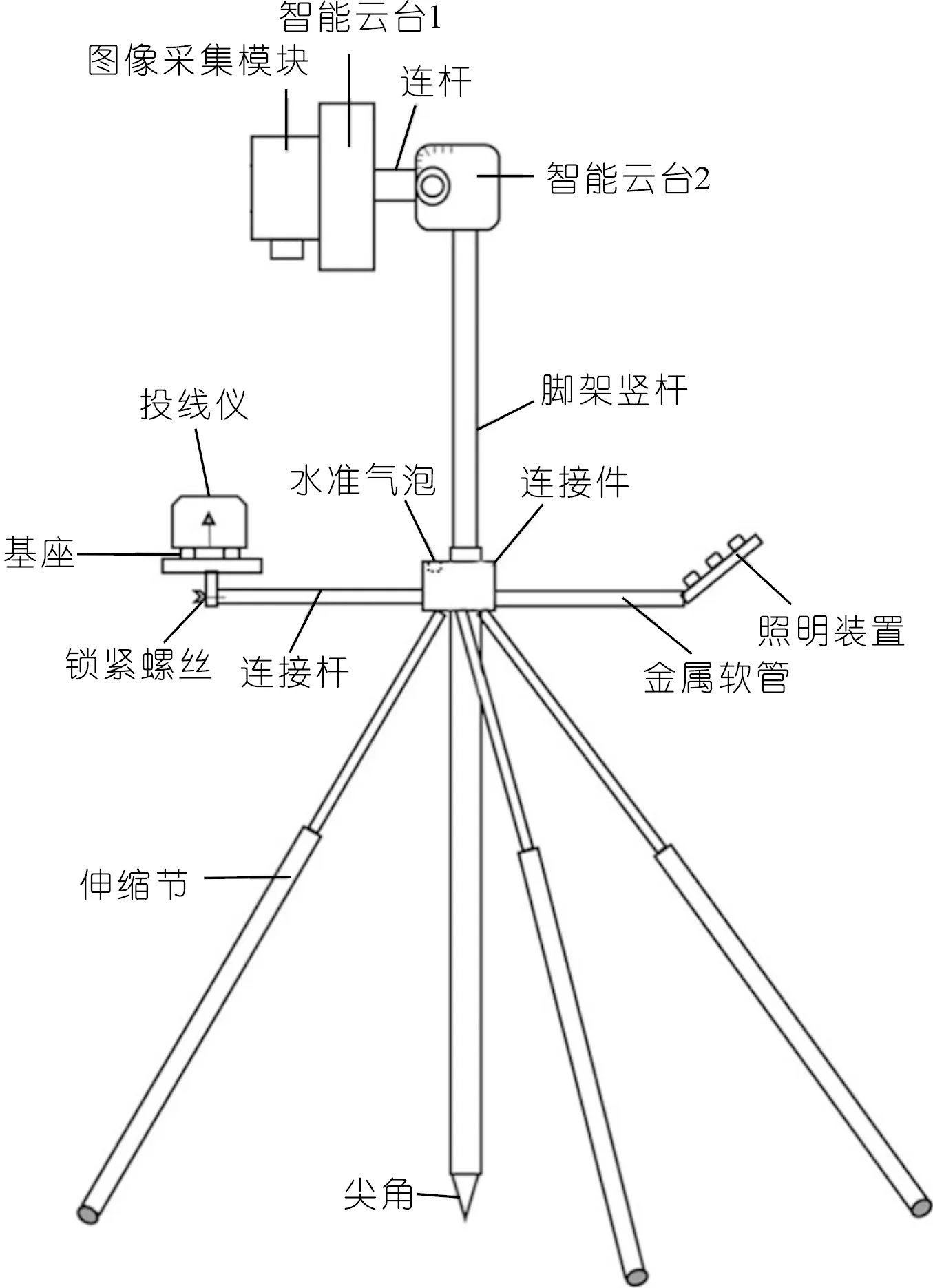
图2 全景摄影测缝系统结构Fig.2 Structure diagram of panoramic photography for structural seams detection
图像采集模块可选用高清微单相机,如索尼α7Ⅱ相机,其影像分辨率高,质量较轻,具备独立供电和存储功能。相机可通过无线通讯模块将获取的影像实时发送至移动客户端,实现影像质量实时监测。图像采集模块采用专用连接螺丝安装在智能云台上,智能云台1和智能云台2采用可90°旋转的连杆连接。连杆旋转时可根据刻度固定角度和锁定,实现三轴旋转功能,满足不同角度垂直于隧洞壁拍摄。影像采集模块和智能云台1同步控制并利用同步信号线连接,且具备遥控功能,方便实际操作。智能云台2采用连接螺丝固定在脚架竖杆顶端,脚架竖杆采用可伸缩高强度碳纤维杆,竖杆上有刻度,可按需调整安置高度。竖杆底端采用测量对中杆类似的尖角,方便准确定位。脚架连接件上配置有水准气泡,它和尖角配合进行装置对中整平安置,脚架另外3个稳定支撑脚可伸缩调节。投线仪用基座、锁紧螺丝和连接杆固定连接在脚架左侧,连接杆采用刚性碳纤维材料,调节紧锁螺丝可将基座绕轴旋转一定角度后固定,基座上的脚螺旋可以进行投线仪投射方向的微调。补光模块用金属软管固定安装在脚架右侧,照明装置可选用充电式LED照明灯,可根据隧洞内光线情况任意调节照明方向。
2 结构缝全景影像获取及空间信息提取
利用集成的全景摄影测缝硬件系统进行结构缝全景影像获取、处理及空间信息提取和表达。主要技术路线如图3所示,主要包括3个工作步骤:① 隧洞结构缝高清影像获取;② 结构缝高清影像处理;③ 结构缝空间信息提取和表达。
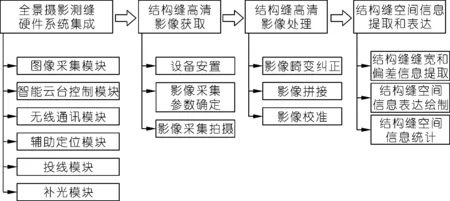
图3 结构缝全景影像获取及空间信息提取技术路线Fig.3 Technical route for panoramic images acquisition and spatial information extraction of structural seams
2.1 隧洞结构缝高清影像获取
根据盾构隧洞的尺寸确定相机拍摄位置。相机安置在隧洞中心,利用集成的高清微单相机对隧洞结构缝进行连续拍摄。从边顶拱一侧开始拍摄,拍摄完一张影像后,相机旋转固定角度拍摄下一张影像,影像之间保证重叠不低于20%,直至获取结构缝边顶拱所有影像数据。影像拍摄时,使用投线仪投射一条与结构缝截面近似平行的投射线作为后期影像处理的参照。前述高清微单相机可以根据结构缝量测精度选取。选择合适焦距和像元尺寸的相机,保证在隧洞半径拍摄距离下,影像的分辨率可以达到0.5 mm或更高,以确保结构缝量测精度可以达到1 mm/cm的精度要求。
2.2 结构缝高清影像处理
对采集的结构缝影像进行处理,包括影像畸变纠正、影像拼接、尺度校准。
2.2.1影像畸变纠正
由于数码相机镜头存在畸变,主要包括镜头径向曲率的不规则变化引起的径向畸变和透镜本身与传感器平面(成像面)不平行所产生的切向畸变[10-11],为了克服镜头畸变带来的成像误差影响,采用多项式畸变模型对原始影像进行畸变纠正,减小镜头畸变对结构缝量测精度的影响。
(1)

2.2.2影像拼接
影像畸变纠正完成后,按照连续拍摄顺序对影像进行排序,经过影像匹配、镶嵌、匀光匀色等常规处理,将隧洞结构缝影像无缝拼接。对于拼接效果不好的情况,需要调整匹配策略,并辅助选刺连接点,调整优化影像拼接效果。
2.2.3影像尺度校准
对影像拼接处理得到的隧洞结构缝高清影像合图,利用隧洞尺寸进行校准。根据盾构隧洞的尺寸,隧洞边顶拱圆弧所对应的扇形角为λ,结构缝影像连续拍摄时,每次相机旋转的固定角度为φ,结构缝影像合图中边顶拱的成像对应的实际长度S可由式(2)得到:
(2)
式中:R为盾构隧洞半径;λ为隧洞边顶拱圆弧所对应的扇形角;φ为相机每次旋转的固定角度;S为结构缝影像合图中边顶拱的成像对应的实际长度。
根据得到的边顶拱在影像中成像对应的实际长度,对影像进行绝对尺度的校准,以得到结构缝的空间信息。给定边顶拱成像长度的水平线作为参照线,确定边顶拱在影像上的起止位置。基于影像上与结构缝平行的投射线,以参照线作为参考,对影像进行平移、旋转、缩放变换,使得影像上的投射线与参照线重合,此时影像校准完成,影像上量得的结构缝缝宽可直接转换为结构缝的实际宽度。
2.3 结构缝空间信息提取和表达
基于以上步骤得到的尺度校准后结构缝的高清影像,提取结构缝边线;根据结构缝边线提取结构缝截面的中线;根据结构缝表达的精细程度要求,按照一定间距选取结构缝截面中线上的节点,利用RANSAC算法[12],进行直线拟合,拟合出理想的结构缝中轴直线;采取截取结构缝断面的方式统计结构缝缝宽及轴线偏移信息。按照10 cm间距截取结构缝断面线,以顶拱的缝宽断面线中点为坐标原点(0,0),过原点与拟合的结构缝中轴直线平行的直线为X轴,垂直方向为Y轴;定义面向下游方向时右侧为X轴正方向,上游方向为Y轴正方向;每条断面线的长度为结构缝的缝宽值,取每条断面线两侧端点距X轴距离较大的一侧端点在坐标系中的坐标(xi,yi),其可表达结构缝断面相对顶拱的位置及轴线偏移信息。最终可将结构缝缝宽和轴线偏移信息以直观的图形表达出来。
3 结果与分析
3.1 结构缝影像采集与处理
将本文研究的设备和方法应用到穿黄隧洞工程的检修中,对结构缝进行全面检测。隧洞半径为3.5 m,边顶拱长度为18.672 m,其结构缝平均宽度约2 cm,要求结构缝宽度量测精度为1 mm/cm。图4为在隧洞结构缝影像采集现场,作业人员利用自主集成的硬件设备,进行结构缝有序高清影像采集,采集影像平均分辨率为0.3 mm。

图4 结构缝全景影像采集Fig.4 Panoramic images acquisition of structural seams
本次共采集461条结构缝影像,进行影像数据处理,对结构缝空间信息进行提取。如图5为3条结构缝全景影像图。从全景影像图中可以直观看到结构缝的整体情况,快速发现结构缝存在的破损、扭曲等缺陷。

图5 结构缝全景Fig.5 Panoramic images of structural seams
3.2 结构缝空间信息提取和分析
基于影像提取结构缝边界,利用本文方法获取结构缝缝宽和轴线偏移信息,输出表达成折线图。图6~8为获取的其中3条结构缝的空间信息及影像图。

图6 M77~M76仓结构缝空间信息及影像Fig.6 Spatial information and image of structure seams of M77~M76 section
(1) 各图中以顶拱的缝宽断面线中点为坐标原点(0,0),横轴表示距顶拱的距离(顺水流方向,右侧为正,左侧为负),纵轴分别表达缝宽和轴线偏差信息。相对结构缝长度来说,轴线偏移量很小,为了直观、形象地表达轴线偏移信息,折线图中将横轴压缩100倍显示。另外,为了根据折线图的X轴直观、快速地定位到结构缝图像对应的位置,将结构缝全景影像图截取成多段,并加上与X轴对应的距离标尺,对比查找缺陷位置,清晰直观。

图8 G342~G341仓结构缝空间信息及影像Fig.8 Spatial information and image of structure seams of G342~G341 section
(2) 按分段区间对缝宽和轴线偏差信息较大值(缝宽大于30 mm,轴线偏差大于20 mm)进行统计,得到统计表如表1~3所列。从图6~8及统计表中可以看到:M77~M76仓结构缝整体情况较好,只有两处缝宽超过30 mm的缺陷,轴线偏差值也较小,仅一处超过20 mm;M2~M1仓结构缝缝宽也较好,仅末端一处缝宽为30.3 mm,但该条结构缝轴线偏差较大,超过20 mm的区段有12处,从对应全景影像图上可以看到结构缝有多处明显弯曲;G342~G341仓结构缝缺陷非常明显,在-4~4 m位置区间,结构缝有多处较大破损,结构缝整体轴线偏差值也较大。在后续的检修、维护工作中,结构缝弯曲、破损处就是施工维护的重点区域,弯曲的区段需要切割拉直,破损的区段需要进行填缝修补,以保证橡胶板粘贴的效果,确保止水效果优良。

表1 M77~M76仓缝宽及轴向偏差统计
3.3 结构缝缝宽量测精度比较验证
为了验证本研究的实际应用效果和精度,对利用本研究提取的结构缝缝宽与实际现场游标卡尺量测的宽度进行比较,将现场人工量测的断面缝宽值作为真值,选取了23条结构缝进行比较,精度统计见表4。从表4可知,本研究基于全景影像提取的结构缝缝宽值精度完全满足1 mm/cm的量测精度要求。利用本研究中的方法对结构缝进行检测,具有快速、高效、准确、全面和直观的优点。
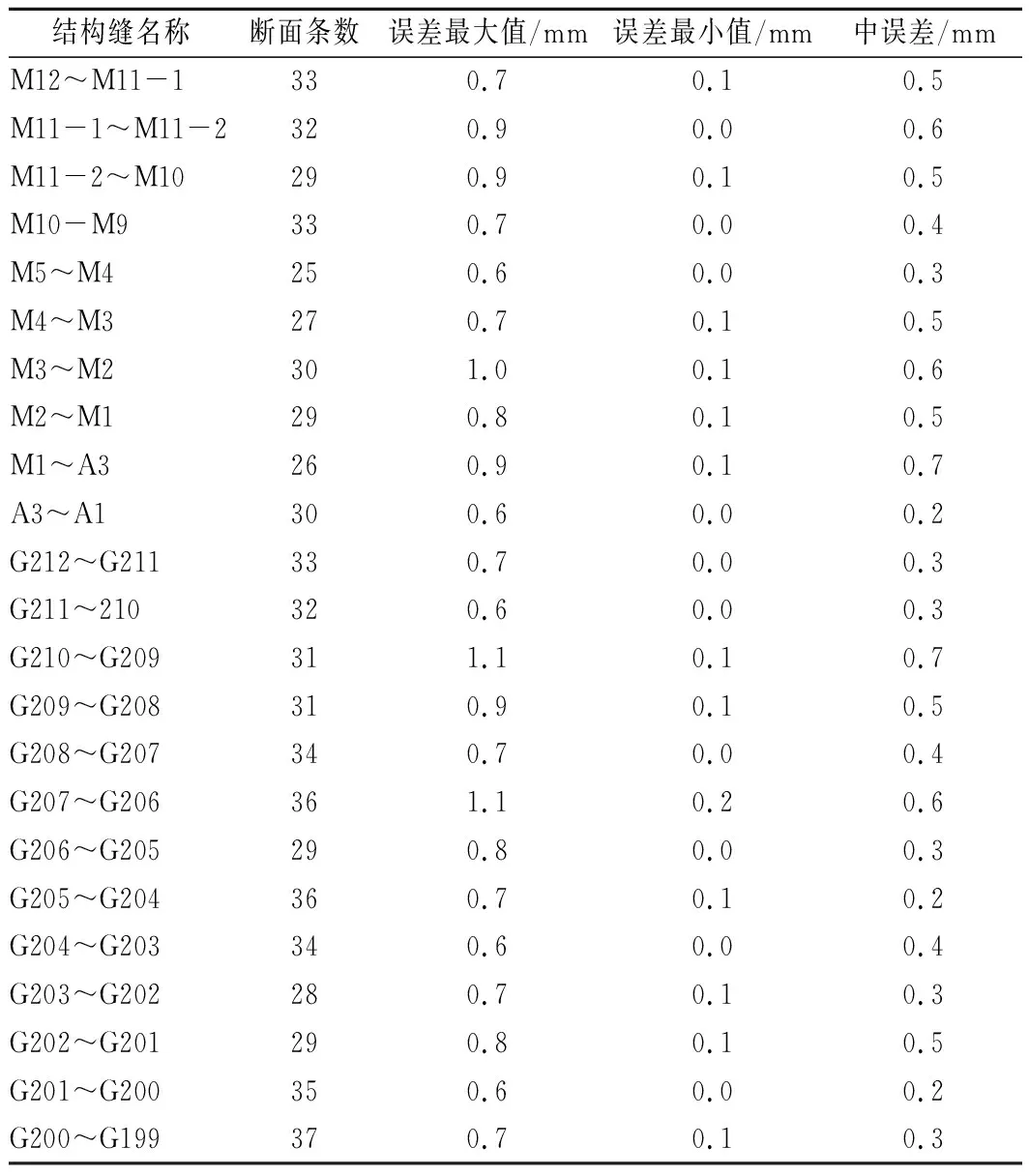
表4 结构缝缝宽量测精度统计
注:1.M77~M76仓平均缝宽为22.6 mm,平均轴线偏距为+2.0 mm; 2.坐标原点为结构缝顶拱中心,位置区间顺水流方向隧洞左侧为负,右侧为正,偏距区间为缝边线到平均轴线的绝对值较大值,上游为正,下游为负;下同。
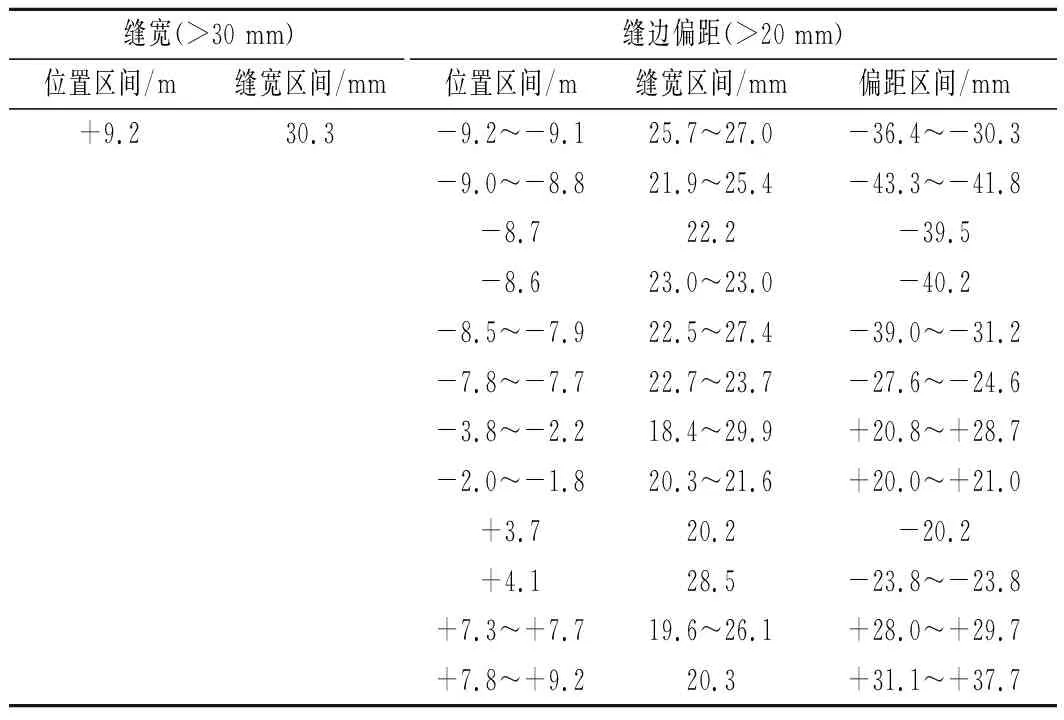
表2 M2~M1仓缝宽及轴向偏差统计
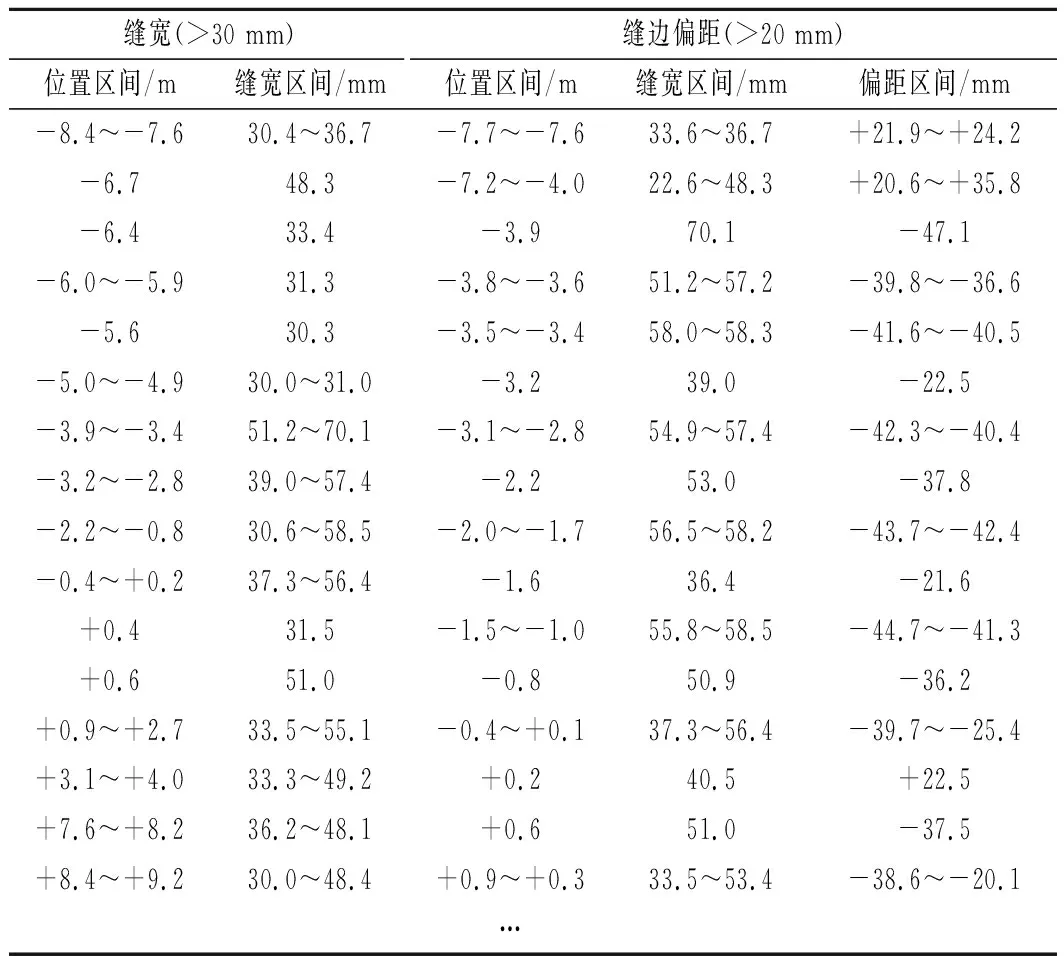
表3 G342~G341仓缝宽及轴向偏差统计
4 结 论
本文提出了一种引水隧洞结构缝检测方法,其具体集成了一种结构缝检测专用设备,可以按照一定的规律获取结构缝的有序高清影像,通过对影像进行畸变纠正等预处理,再进行全景影像无缝拼接,并通过数学关系对结构缝成像合图进行绝对尺度校准。对基于以上方法得到的结构缝全景影像图进行结构缝边界提取,然后通过轴线拟合、断面截取、量测等方式,得到结构缝的缝宽和轴线偏移信息,再通过图表直观地表达。本研究成果具有如下优点:
(1) 通过本研究获取的结构缝高清影像,可实现对结构缝空间信息的准确、高效、直观量测和表达,操作简单,人工劳动强度低,极大提高了结构缝检测的效率,降低了检测成本和安全风险;
(2)通过本研究可获取结构缝在不同维护施工阶段的高清影像数据,对结构缝空间信息的表达比传统方法单一的表格表现方式更加精确、全面和直观;
(3)本研究获取的结构缝影像和空间信息,可为引水隧洞结构缝检修的工程量计算、工作计划制定和检修情况提供全面、科学的依据,为隧洞结构缝精准检修维护提供重要科学指导和支撑;
(4)该技术还可以应用在各类输水建筑物结构缝维护中,另在水利、铁路、公路、桥梁等大中型基础设施隧道衬砌和穿跨越工程结构缝及其他关键部位空间信息测量和形变监测中均具有广阔的应用前景。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
北京航空航天大学学报(2022年8期)2022-08-31
建材发展导向(2022年4期)2022-03-16
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年12期)2021-07-22
计算机应用与软件(2021年2期)2021-02-25
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
报刊荟萃(上)(2017年3期)2017-06-26
艺术与设计·理论(2016年11期)2017-01-13