无人机倾斜摄影空中三角测量解算关键技术优化研究
2022-08-08 04:55:08邵金鹏
科技创新与生产力 2022年5期
邵金鹏
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
近年来,倾斜摄影测量建模技术发展迅速,“房地一体”“实景三维中国”以及大比例尺地形图测绘等重大项目都在采用该技术,解决该技术目前存在的问题,可以有效提升数据生产效率,保证项目顺利完成。
针对倾斜摄影空中三角测量解算优化,多数研究学者都是从如何获取高质量外业影像成果、怎样提升内业影像成果质量入手[1-3],很少有学者从软件目前的算法入手,分析软件解算数据的过程,针对解算过程进行优化。
本文对倾斜摄影测量的原理、目前主流建模软件和建模流程进行简单介绍,重点分析目前软件空中三角测量存在的问题,针对问题提出相应的解决方案,并通过实际项目进行实验验证,实验结果表明,本文提出的空中三角测量优化方案,可有效提升空中三角测量的通过率和成功率,有效提高数据生产效率,可为倾斜摄影测量建模相关作业人员提供有效参考。
1 无人机倾斜摄影测量技术
1.1 无人机倾斜摄影测量建模原理
倾斜摄影测量是相对于垂直摄影测量来说的,传统的搭载单镜头进行航空摄影测量作业的方式被称为垂直摄影测量;而同时搭载多镜头,从多角度获取地面影像的方式被称为倾斜摄影测量[4]。垂直摄影测量一般可以直接获取建构筑物顶部信息;倾斜摄影测量除了可以直接获取建构筑物顶部信息外,其搭载的侧视镜头可以获取建构筑物的侧面纹理信息[5],这为地物真实还原提供了保障。
在倾斜摄影测量建模里面,无人机通常搭载的相机有2 镜头相机和5 镜头相机,其中5 镜头相机搭载1 个下视镜头和4 个侧视镜头,下视镜头与侧视镜头呈45°夹角,侧视镜头焦距一般是下视镜头的1.414倍,这样能够确保获取的影像地面分辨率尽可能一致。
1.2 无人机倾斜摄影测量建模软件
建模软件最著名的是Bentley的Context Capture(原Smart3D),目前使用人数最多的也是该款软件。除了这款软件外,常用到的建模软件还有Pix4D、PhotoScan、Photomesh、Mirauge3D、重建大师、大疆智图、瞰景的Smart3D等。这些软件各自都有其特点,在实际生产中,都是被用来进行数据生产的。由于每个软件的优势不一样,因此在处理有的数据时,需要多个软件组合使用。就目前的软件使用经验来说,单机处理数据效率最高的是大疆智图,一次性处理影像数据最多的是瞰景的Smart3D和Mirauge3D,建模效果较好的是Context Capture、瞰景的Smart3D和大疆智图。
1.3 无人机倾斜摄影测量建模流程
无人机倾斜摄影测量建模工作主要分为外业工作和内业工作,外业工作主要有测区勘查、数据搜集、空域申请、航线规划、影像数据获取和控制点坐标采集;内业工作主要有对外业的数据预处理、工程建立、空中三角测量加密解算、控制点转刺平差、多视影像密集匹配、构建不规则三角网(Triangulated Irregular Network,TIN)、白膜生成、纹理自动优化映射、模型格式转换输出等。具体的无人机倾斜摄影测量建模流程见图1。
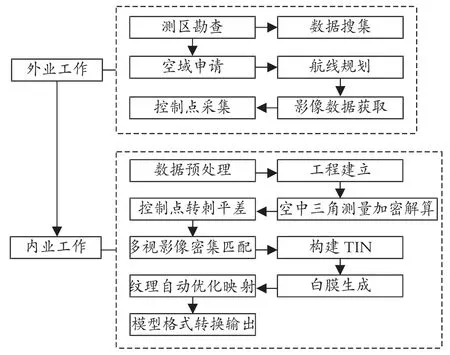
图1 无人机倾斜摄影测量建模流程
2 空中三角测量解算关键技术优化研究
空中三角测量解算是整个内业数据处理中最为重要的一个步骤,也是无法人为干预的一个环节。对于空中三角测量解算,本文从以下3个方面进行分析,对其进行优化,使空中三角测量解算精度和成功率都得到提高。
2.1 数据冗余问题
数据冗余是指两方面的冗余:一方面是倾斜摄影测量本来镜头多,且航向重叠度、旁向重叠度都在80%以上,这导致了数据量大;另一方面是无效影像的数据冗余,无效影像是指对建模效果不产生影响的影像,这些影像主要位于任务区的测区边缘。在正常航空摄影测量作业中,为了保证测区边缘生产的模型效果好,都会外扩至少1 个航高,由于搭载的是5镜头,这样就会获取很多无效影像。这些无效影像的存在,一方面影响了空中三角测量解算的速度和效率;另一方面测区边缘的影像重叠度相对较差,这增加了空中三角测量解算的失败率。因此,解决数据冗余问题,可以有效提升空中三角测量解算的效率和成功率。
结合5镜头安置位置和飞机飞行方向,可以很容易获取测区边缘的无效影像。基于此,在数据处理时,采用MATLAB语言开发了一款无效影像剔除软件,可以有效剔除测区边缘无效影像。
2.2 POS 数据不对应问题
定位定姿系统(Position and Orientation System,POS) 数据不对应主要是指POS 数据位置和相机曝光位置不对应。目前主流的5 镜头相机,在数据解算时,都采用下视镜头的POS 数据来代替侧视镜头的POS 数据,并没有考虑镜头之间的安置关系,这不利于数据顺利解算。
针对POS 数据不对应问题,分析5 镜头之间的安置位置关系,可以准确获取4个侧视镜头和1个下视镜头之间的安置位置关系。通过下视镜头,结合平台检校参数,采用MATLAB语言开发了一款5镜头POS数据解算软件,分别计算得到4个侧视镜头的POS数据坐标值。这样使得POS数据和像片一一对应,在数据解算的时候,有利于空中三角测量解算,也可以有效提高空中三角测量精度。
2.3 相机参数不精确问题
目前已有的相机检校场和检校软件,是针对垂直摄影测量设计的,其可以对下视镜头像片进行精确数据解算。倾斜摄影测量由于侧视镜头视场角变化大,无法对其进行精确数据解算。在数据解算时,都是输入粗略的焦距,并不是精确的相机参数。通过垂直摄影测量数据解算可知,相机参数精确,有利于数据解算,因此,获取精确的相机参数,可以有效提升倾斜摄影空中三角测量解算的效率和精度。
从相机参数优化方面入手,可以在正式生产数据前,先用少量像片进行空中三角测量解算,并转刺3~4个控制点进行平差调整,得到精度合格的空中三角测量成果。此时的相机参数是已经优化后的,可以将此相机参数作为初始值,用来进行正式数据解算。利用精确的相机参数,不但可以提高数据解算效率,而且可以提高数据解算精度,有利于提升空中三角测量加密成果质量。
3 基于Smart3D软件的无人机倾斜摄影测量建模
3.1 项目与任务区概况
本次项目为河湖确权项目,采用倾斜摄影测量完成地面分辨率优于3 cm 的原始影像数据获取。任务区宽300 m,长约50 km,共获取影像35 650 张。
3.2 数据预处理
按照本文提到的方法,对获取的影像数据、POS 数据和相机参数进行优化。首先,利用无效影像剔除软件对原始影像进行处理,剔除无效影像3 252 张;其次,采用5 镜头POS 数据解算软件,结合下视镜头POS 数据,分别解算出4 个侧视镜头的精确POS 数据;最后,利用300 张影像进行空中三角测量解算,并转刺5 个控制点,通过平差调整,得到优化后的精确相机参数。
3.3 工程建立
新建工程,加载有效影像32 398张,并导入解算后的POS 数据,然后手动填入优化后的相机参数,设置任务路径,便于后期集群进行数据解算。
3.4 空中三角测量解算及平差
在工程建立完成后,就需要进行空中三角测量解算了。为了对比空中三角测量优化前后的效果,首先利用35 650 张影像和下视镜头的POS 数据整体进行空中三角测量解算,结果空中三角测量解算虽然未失败,但是整个带状任务区呈现弯曲现状,通过转刺控制点及平差调整多次,弯曲现状并未发生明显变化,即优化前的空中三角测量解算总体是失败的,成果不可用。
按照本文的方法,对有效影像进行解算,自由网空中三角测量一次性完成,空中三角测量整体呈水平状态,成果可用。将控制点转刺到空中三角测量中,并进行平差调整,通过查看平差报告可知,空中三角测量精度质量高,空中三角测量成果可用。较优化前,不但成果可用,而且空中三角测量解算用时少,精度高,数据解算效率有了明显的提升。
3.5 实景三维模型生产
在空中三角测量完成的基础上,进行实景三维模型的生产。结合集群电脑的配置,设置合理的瓦片大小。本次集群电脑中配置最低的电脑内存为32GB,因此在瓦片大小设置时,设置为120 m,预计需要内存14 GB。这样可以确保在建模过程中,可以一次性得到实景三维模型,降低瓦片重建的失败率。导入任务区范围线进行实景三维模型输出约束,提升实景三维模型输出的可用率。
实景三维模型生产完成后,通过人机交互的方式查看任务区的测区边缘的实景三维模型。任务区的测区边缘的实景三维模型重建完整,质量良好,说明剔除无效影像未对实景三维模型质量产生影响。
3.6 精度检测及统计
本次河湖确权项目,需要生产1∶500比例尺地形图,因此对实景三维模型精度需要进行检测。采用同精度检测方式,利用82 个检测点对实景三维模型精度进行检测。通过检测可以得知,在82 个检测点中,平面最大较差为0.125 m,平面中误差为±0.064 m,高程最大较差为0.213 m,高程中误差为±0.071 m,成果精度符合1∶500 比例尺地形图的测图规范要求。
4 结束语
在倾斜摄影测量建模数据处理中,空中三角测量解算是最重要的一个步骤。本文分析了影响空中三角测量解算的3 个因素,并提出相应的解决方案。以实际项目为例,通过关键技术优化前后的空中三角测量解算进行对比分析,结果表明,采用本文的关键技术优化方案可有效提升倾斜摄影空中三角测量解算的效率和成功率,并未对实景三维模型质量带来影响,可以为同行的建模人员提供有效参考。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
测控技术(2018年10期)2018-11-25 09:35:40
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
北方音乐(2017年4期)2017-05-04 03:40:09
现代防御技术(2014年6期)2014-02-28 18:26:29
测绘科学与工程(2014年2期)2014-02-27 07:05:50