基于北斗三代的铁路监测预警系统设计
2022-08-08 07:29于进江杨世忠赵星宇贺云飞
铁路计算机应用 2022年7期
于进江,甘 雨,杨世忠,赵星宇,贺云飞,何 韦
(1. 京张城际铁路有限公司 运输安全部,北京 100070;2. 湖南北斗微芯产业发展有限公司 技术中心,长沙 410000)
对于铁路的安全运营来说,任何微小的异常或干扰都有可能导致严重的安全事故,造成经济损失甚至人员伤亡。铁路轨道的沿线边坡和路基因受到雨雪、地质运动等因素的影响而存在滑坡、崩塌、沉降等安全隐患。以边坡为例,岩体在重力、构造力、地震力,以及各种外营力的长期作用下,会有一种向下滑落的趋势,这种趋势受到岩体本身抗剪切、抗破坏力的阻抗。当岩体阻抗力小于向下滑落的破坏力时,岩体滑坡或崩塌的情况就会发生,并极有可能会造成灾害。除了地质风险外,路基、桥梁、隧道、车站等铁路基础设施的状况也影响着铁路的运营安全。
由于北斗卫星导航系统(简称:北斗)在变形监测方面的作用日益凸显[1-2],很多专家和学者已经开始将北斗应用于铁路安全监测领域[3-5]。秦健等人[6]深入探讨了北斗地基增强系统构建和基准站选址问题,但尚未涉及第三代北斗卫星导航系统(简称:北斗三代)的变形监测。
本文基于北斗三代高精度定位技术,设计铁路监测预警系统,详细阐述北斗三代的变形监测原理;同时,利用实际数据对北斗相较于全球定位系统(GPS,Global Positioning System)的优势进行计算和论证,对比不同基线长度对变形监测精度的影响,为基准站的布设距离提供参考。
1 基于北斗三代的铁路监测预警系统架构
基于北斗三代的铁路监测预警系统以北斗三代接收机为核心,融合位移、雨量、水位等全维度感知信息,能够实时且动态地测量监测点的要素变化,通过高通量、自适应、多回路的通信网络将监测数据全天候、不间断地回传至监测云平台。监测云平台对回传的监测数据进行计算和分析,根据结果发出预警信息,保障铁路的安全运营。
1.1 以北斗为核心的实时感知网络
1.1.1 北斗区域增强系统
北斗区域增强系统为服务区域内提供永久性、连续运行的差分信息,避免同一区域内基准站的重复建设,提高设备的利用率。
北斗区域增强系统由连续运行的基准站网、控制与数据中心、高速数据通信网、运营服务等子系统组成。各子系统主要功能及其构成,如表1所示。

表1 各子系统的功能及其构成
1.1.2 多维度实时感知网络
多维度实时感知网络的主要功能是针对灾害隐患点建设全维度地质灾害诱发因素(如灾害体位移、气象环境、水位、含水量等)监测网络,由全维度监测传感设备组成。多维度实时感知网络通过这些传感设备采集影响或诱发地质灾害的可量化信息,为灾害监测、风险评估、地灾预警、应急管理等提供数据依据。多维度实时感知网络的典型配置如表2所示。

表2 多维度实时感知网络的典型配置
表2所列配置能够监测造成滑坡灾害的相关因素。各感知设备的作用如下。
(1)高精度北斗三代监测站
高精度北斗三代监测站是核心设备,由北斗三代接收机、结构件、供电设备构成,提供高精度三维位移信息。
(2)雨量计
降雨是诱发滑坡灾害的主要因素,降雨量是滑坡灾害监测中必要的监测因素。多维度实时感知网络能够通过隐患点区域设置的雨量计,实时采集隐患点的小时降雨量信息,实现对滑坡灾害的预警。
(3)深部位移计
深部位移监测通过打孔方式在灾害体深层不同深度安装深部位移监测设备,采集灾害体深层的倾斜及相对位移变化,从而获得地质内部结构变化情况,为灾害体发展及变化趋势提供多维度的监测数据。深部位移计是监测滑坡灾害诱发因素的重要手段。
(4)土壤含水量传感器
土壤含水量的变化可导致土体自重、土体粘接力和内摩擦角的变化,从而使土体内部力学平衡结构产生变化。土壤含水量是发生滑坡灾害的重要因素,因此,多维度实时感知网络通过土壤含水量传感器监测土体中多层次的水分含量变化,对土体内部的平衡结构进行监测。
(5)孔隙水压计
孔隙水压力增大易引起感知体失稳。监测孔隙水压力,不间断地感知灾害体在土体固结、基础变形、水流渗透等因素作用下孔隙水压力的大小和变化,能够为多维度实时感知网络分析灾害体的稳定性提供物理数据依据。
(6)视频监控设备
视频监控作为常见的可视化监测手段,可以直观地观察被监测灾害体的变化情况。此外,具有夜视功能的视频设备可以实现对灾害体24 h不间断监测。同时,远程云台控制功能可以使监测人员通过远程控制的方式全面了解灾害体周边情况。
(7)声光报警器
声光报警器能够进行声音告警及光电告警,快速且直接地提醒灾害体周边的群众。
1.2 高通量自适应多回路通信网络
为了保证监测数据能够不间断实时回传至云平台,铁路监测预警系统设计了多回路通信链路,由蜂窝移动通信网、窄带物联通信网及天基卫星网组成。当蜂窝移动网和窄带物联通信网受到灾害影响且通信中断时,通信可以切换至天基卫星网,这是因为卫星通信不受地域限制,不受灾害影响,且支持灵活部署。
铁路监测预警系统使用的宽带卫星一体化设备为Ka波段终端,该终端可直接提供RJ45接口,方便其他设备接入。宽带一体化设备如图1所示。
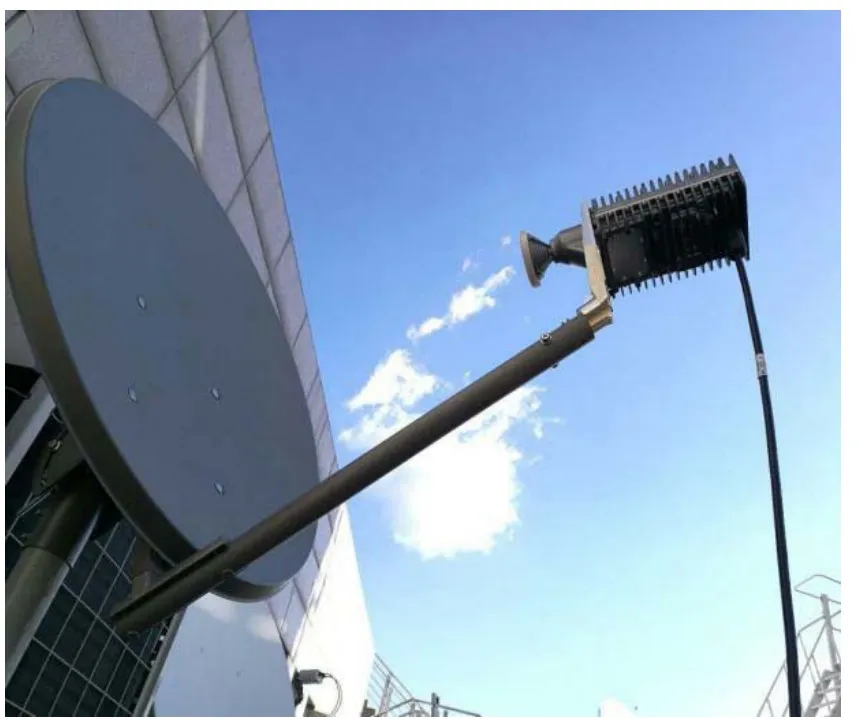
图1 宽带卫星一体化设备
1.3 云平台
铁路监测预警系统通过监测云平台,依托高吞吐量数据处理技术、并行业务集群计算技术,实现快速评估地质灾害隐患点的风险,并提供相应的预警预报及辅助决策信息,建立地质灾害隐患点的全面防控体系,实现地质灾害可控制、可预防。
云平台能够对所有监测数据进行清洗、分析、汇集、存储和管理,并基于云计算技术对监测数据进行分布式大数据分析及处理,得到所有监测对象的全维度监测信息。云平台监测的北斗位移情况如图2所示。

图2 云平台监测的北斗位移情况示意
铁路监测预警系统通过云平台集成的大数据分析和处理模块进行数据处理和可视化展示。当异常情况发生时,铁路监测预警系统将通过现场广播、电话、短信、邮件等形式实时向管理机构汇报预警信息,并提供高精度实时应急管理支持。
2 北斗变形监测技术
2.1 双差相对定位
北斗定位的误差源主要包括星历误差、卫星钟差、接收机钟差、电离层时延、对流层时延等因素,这些误差源产生的影响可以通过双差相对定位进行消除。在一定距离内,同步观测的北斗接收机之间存在误差相关性,通过观测值之间组差,可使误差被消除或大幅削弱,得到较高精度的相对位置。
监测站接收机j与卫星q的载波相位观测方程[7]为

若于基准站接收机i对卫星q进行同步观测,可得观测方程为

两个监测站间观测方程组差,可得站间单差观测方程为

两个监测站同时对卫星p也能得到单差观测方程,在不同卫星p、q间观测方程组差,可得站星双差观测方程为

解算双差观测方程时,基准站接收机i坐标由其他渠道获得,对观测方程中的和线性化,则有和为坐标近似值计算的几何距离,为接收机到卫星的方向余弦,dX为所求位置改正数向量参数。

将方向余弦表示为更简洁的向量形式,则有

将所有共视卫星双差观测方程联立,构成矩阵形式的双差观测方程组

其中,X代指dX,整周模糊度向量N由构成,A为观测系数矩阵,e为观测噪声向量。
解方程组可得位置浮点解和模糊度浮点解。
要得到毫米级位置测量结果,必须对浮点解进行固定,将整周模糊度参数恢复为整数。模糊度搜索实质是求解整数最小二乘估计值,而最小二乘模糊度降相关平差(LAMBDA,Least Square AMBiguity Decorrelation Adjustmen)方法目前体系完整、应用广泛,能够对原始模糊度进行整数变换,降低模糊度之间的相关性,缩小搜索范围。
将混合整数最小二乘估计转化为整数最小二乘估计问题[8],如式(8)所示。


2.2 高精度北斗相对定位解算软件
高精度北斗差分定位解算软件使用独特的周跳探测与修复和部分模糊度快速固定技术来提高系统的精度、连续性、完好性,并且在干扰和部分遮挡环境下,仍然能提供高精度的定位信息。
准确探测周跳是北斗高精度载波相位测量的关键问题。周跳会引起位置解算结果发生分米级以上的跳变,影响灾变评估和预警分析。目前广泛使用的TurobEdit探测法[9]由于其中的MW(Melbourne-Wubeena )组合包含伪距观测,受多路径效应和卫星高度角的影响,可能无法探测到1~2周的小周跳。使用小波、经验模分解等信号降噪的方法降低MW组合观测值的噪声,有效降低探测量噪声后,能够探测出所有的小周跳。
使用基于位置约束的多频模糊度融合解算方法,将多频宽巷直接固定法与LAMBDA搜索固定方法联合,逐级固定模糊度。使用部分模糊度固定的概念,通过浮点解验后方差估计,对双差残余误差较大的观测值进行判别和筛选,利用测量条件和几何结构最优的模糊度子集进行固定,提升固定成功率,增加北斗高精度解算的可用性和实时性。
2.3 北斗三代与GPS定位精度对比
北斗三代与GPS定位精度对比的试验数据来自某北斗监测站,该监测站的接收机能同时接收北斗数据和GPS数据,如图3、图4及表3所示。
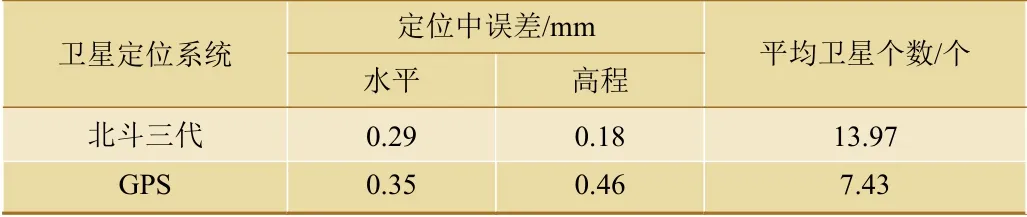
表3 北斗与GPS定位误差对比
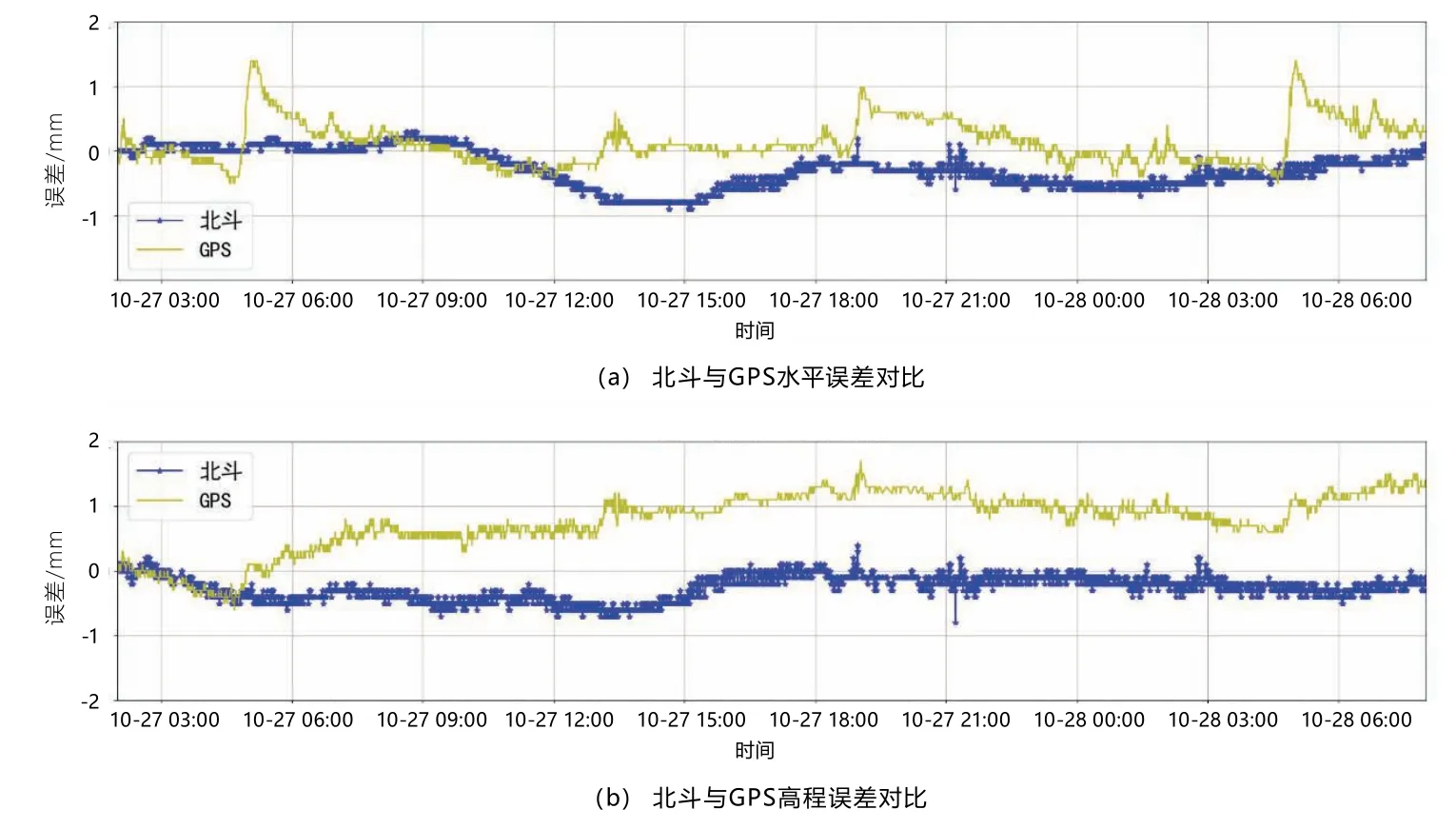
图3 北斗与GPS定位误差对比
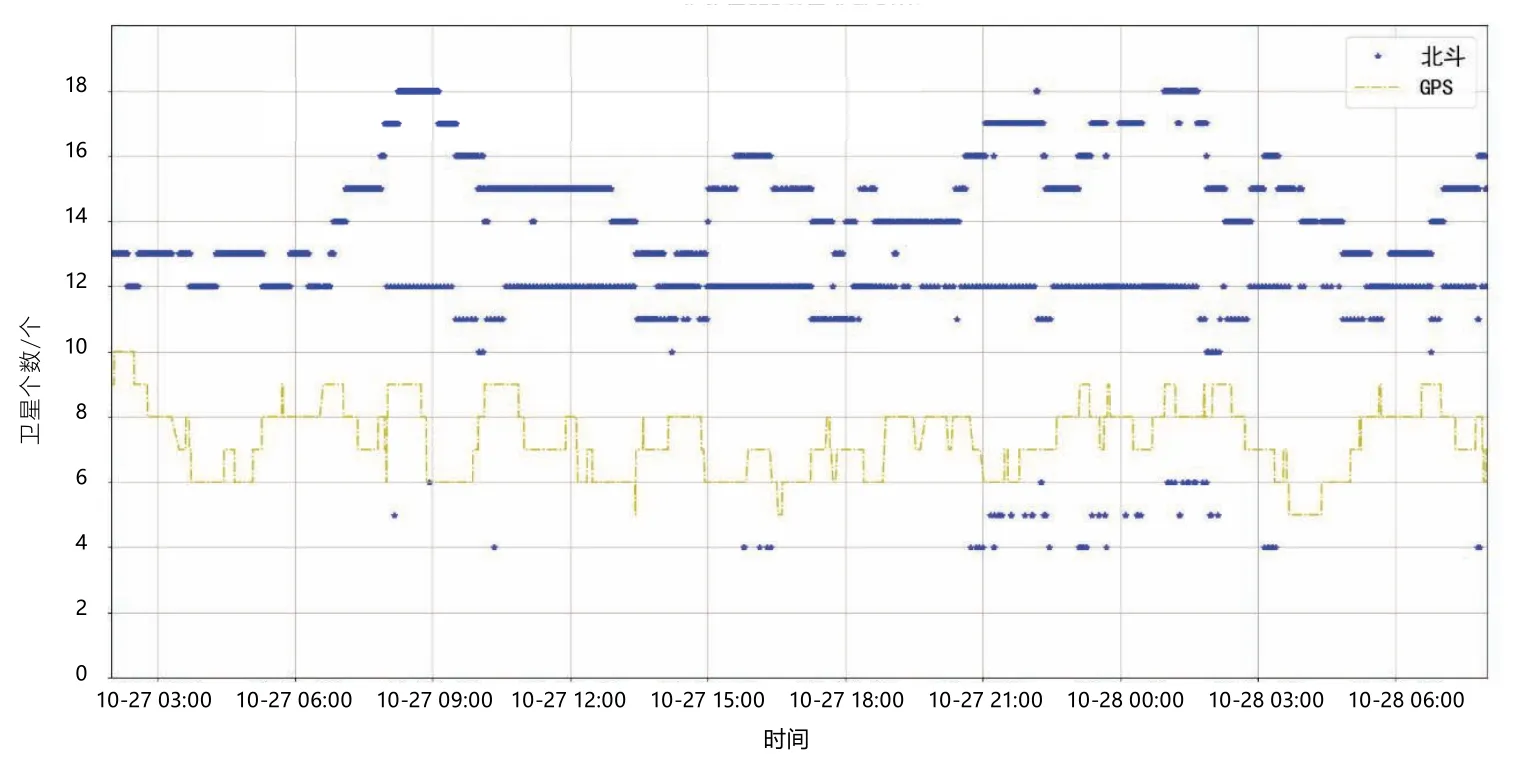
图4 北斗与GPS定位卫星个数对比
从以上图、表可知,北斗卫星个数明显多于GPS;北斗卫星几何结构优良,定位误差明显低于GPS;北斗三代系统在变形监测方面具有显著优势。
3 基线长度测试与分析
试验现场包括一个北斗三代监测站和一套北斗区域增强系统,增强系统中距离北斗监测站最近的两个基准站距离分别为1 km和3 km,北斗监测站的接收机天线安装在沉降和位移平台上进行测试。在试验过程中,我们使用测试台不断调整沉降和位移量,通过解算变形量与实际调整变形量的对比来分析不同基线长度下北斗三代系统解算精度。
3.1 1 km基准站北斗数据分析
图5和图6分别为1 km基站的北斗实测数据与标定台数据的对比曲线。可以明显看出,当每一级标定台位移变化时,北斗实测数据均紧跟着发生变化,且变化趋势一致。1 km基站的位移数据较沉降数据更加稳定,与标定台数据非常吻合。
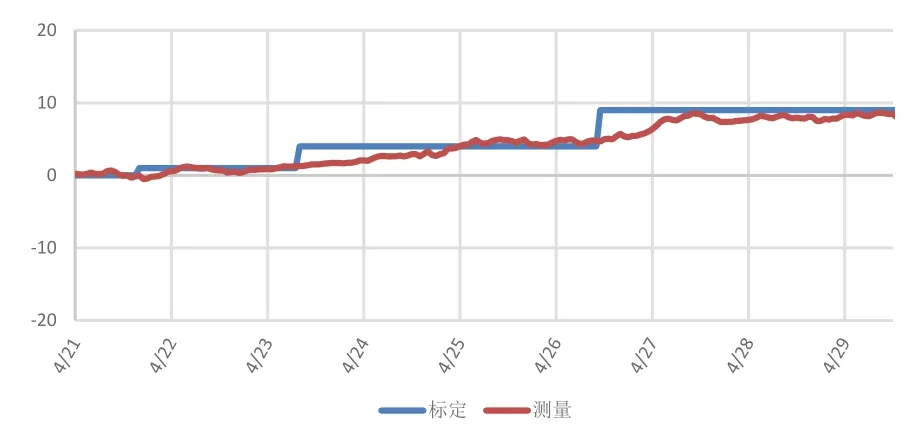
图5 1 km基站水平位移变化曲线
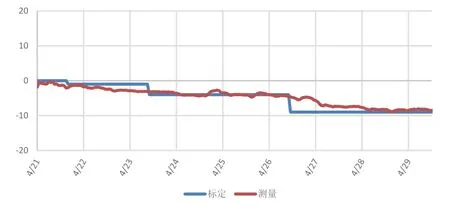
图6 1 km基站竖直沉降变化曲线
表4和表5分别为1 km基站的水平位移和竖直沉降数据统计情况。在整个标定过程中,水平位移共调整了4次,内符合精度在0.227~0.351mm,外符合精度在0.427~1.574 mm。竖直沉降共调整了4次,内符合精度在0.146~1.456 mm,外符合精度在0.979~2.150 mm。

表4 1 km基站水平位移统计

表5 1 km基站竖直沉降统计
3.2 3 km基准站北斗数据分析
图7和图8分别为3 km基站的北斗实测数据与标定台数据的对比曲线。可以发现,当每一级标定台位移变化时,北斗实测数据均紧跟着发生变化,且变化趋势一致。相对于1 km基站的数据来看,3 km基站的数据波动幅值更大。
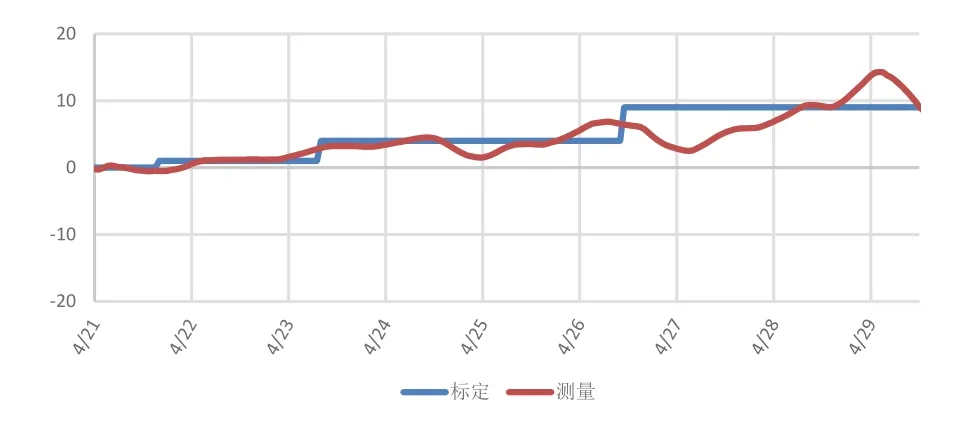
图7 3 km基站水平位移变化曲线
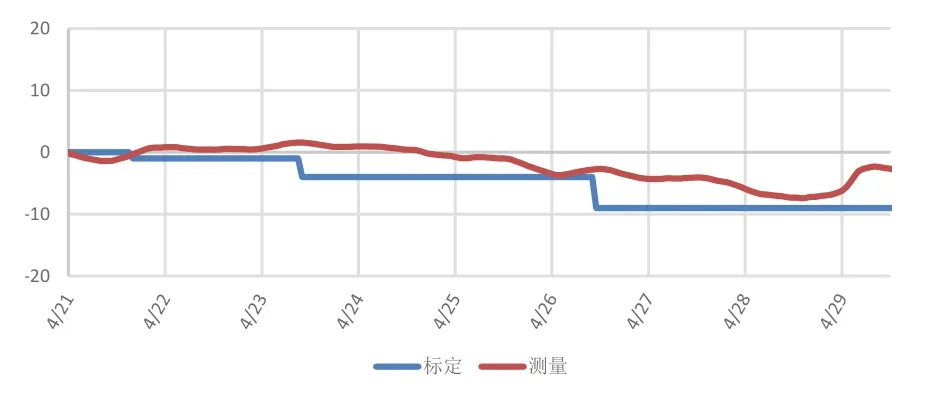
图8 3 km基站竖直沉降变化曲线
表6和表7分别为3 km基站的水平位移和竖直沉降数据统计情况。在整个标定过程中,水平位移共调整了4次,内符合精度在0.540~2.772 mm,外符合精度在1.000~2.723 mm。竖直沉降共调整了4次,内符合精度在0.340~2.083 mm,外符合精度在1.161~4.884 mm之间。受到双差残余误差影响,3 km基线下监测精度相对1 km基线存在显著下降,但仍控制在5 mm以内。

表6 3 km基站水平位移统计

表7 3 km基站竖直沉降统计
3.3 实验结果
通过试验结果可以看出,北斗三代的定位服务性能已超过GPS,在变形监测中可获得优于GPS的结果。铁路监测预警系统采用区域增强、北斗高精度定位、多回路通信、监测预警等多种技术,可协助快速掌握铁路沿线灾害状况,实现对隐患点地质灾害的预测。
4 结束语
本文设计了铁路北斗三代高精度监测预警系统,解决了铁路变形监测实时高精度监测和预警问题,为北斗三代系统在铁路领域的应用提供了重要的思路。未来,本文将继续研究北斗三代系统在铁路中的系统应用,探索铁路北斗增强系统和多源融合监测的新思路,以实现对铁路隐患进行全覆盖、高精度、自动化监测的目标。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
初中生世界·八年级(2021年2期)2021-03-11
民用飞机设计与研究(2020年4期)2021-01-21
理财·市场版(2019年5期)2019-09-10
电子制作(2019年11期)2019-07-04
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
检察风云(2018年12期)2018-07-04
北京航空航天大学学报(2017年9期)2017-12-18