车载LiDAR移动测量系统在地籍测绘中的应用研究
2022-08-06 02:36:16陈哲
资源导刊(信息化测绘) 2022年6期
陈哲
(德州市自然资源局,山东 德州 253000)
1 引言
近年来,随着我国城镇化的不断推进,城市土地供需矛盾日益突出,由此政府加大了国土资源的管理工作。作为国土管理的基础性工作,地籍测绘所形成的数据、图件对于掌握土地利用实际变化情况、持续更新土地调查数据库、深化“一张图”系统和国土综合监管平台建设发挥了巨大作用[1]。地籍测绘方法从传统的平板仪测图、全站仪测图、GPS-RTK 测图,到数字摄影测量测图,精度和效率都在不断提升。三维激光扫描技术是20 世纪90 年代中期开始兴起的一项高新技术,在数据采集速度和范围、数据源的全面性、作业安全性以及自动化等方面都有了质的飞跃,其中,车载LiDAR 移动测量系统以其高效快捷、高精度的特点在当前备受关注。
2 车载LiDAR 移动测量系统
2.1 工作原理
车载LiDAR 移动测量系统是以行驶车辆为搭载平台,能够快速获取行进路线两侧的三维空间信息和影像数据(如图1 所示)。其基本组成主要包括:三维激光扫描仪、全球定位系统(GPS)、惯性测量单元(IMU)、CCD 相机等多种传感器[2]。

图1 车载LiDAR移动测量系统作业示意图
三维激光扫描仪向周围物体发射激光脉冲信号,同时接收物体反射回的信号,其测距原理是通过记录激光脉冲发射的时间与获得脉冲反射的时间差来计算出从激光扫描仪到达物体的距离,计算公式为:

式(1)中,d表示激光发射点和目标点之间的距离,C表示光在空气中的传播速度,Δt表示激光脉冲发射的时间与获得脉冲反射的时间差。
(1)GPS 用于获取当前车载LiDAR 移动测量系统所在位置的精确坐标,其通过基准站和安装在系统上的接收机同时接收导航卫星发射出的信号,再经过计算得出车载LiDAR移动测量系统扫描中心的定位结果。
(2)IMU 通常是在GPS 信号失锁的情况下用于确定车载LiDAR 移动测量系统运行的瞬时姿态[1],在GPS 信号较差的情况下,其通过提供系统横滚、偏航和俯仰这三个姿态信息来补充GPS 信息。
(3)CCD 相机用于获取道路两侧的数字影像,后续可以利用点云和影像的配准算法,给黑白点云附加彩色信息,以及为三维建模提供纹理信息。
2.2 车载LiDAR 移动测量系统的数据特征
作为一种非接触主动探测技术,车载LiDAR 移动测量系统采集的数据具有以下几个特征:
(1)获取到的点云数据量庞大。车载LiDAR 移动测量系统能够以每秒上百万个点的速度扫描地物表面的三维信息,有效扫描距离大约在300m 左右。
(2)数据信息复杂且多样。车载LiDAR 移动测量系统获取的点云数据包含大量的地物要素,这些要素包括道路、路灯、标识牌、护栏等公共设施,行道树、灌木、花圃等绿化设施,以及移动中的车辆、行人等。
(3)点云数据包含多种信息。这些点云数据包含多种有价值意义的信息,除最基本的三维坐标信息外,还可以得到地物的反射强度信息以及多次回波信息[3]。点云与影像数据进行配准后,点云还可以赋予颜色和纹理信息。
3 应用实例
3.1 项目概况
某土地变更调查项目需要进行地籍测绘工作,考虑到使用常规方法生产效率不高,难以在约定工期内完成任务,本项目尝试应用车载LiDAR 移动测量系统进行外业作业。该测区面积约1.5km2,以丘陵地貌为主,房屋分布不规则,具有一定的代表性。
3.2 方案设计
外业数据采集前,首先对测区进行踏勘,以了解测区的道路情况。其次,还需要对车辆的行进路线进行详细规划,尤其是对有树木和高楼的遮挡区域进行实地调查,提出补充测量方案。规划行驶路线的基本原则如下:
(1)以尽可能短的行驶距离完成作业区域的全部扫描任务,同时尽量避免重复扫描。
(2)尽量选择GPS 信号良好的行驶路线,保证测量精度。
3.3 数据采集
(1)设备介绍
本项目所采用的车载LiDAR 移动测量系统是在越野车上集成安装了1 部高精度惯性导航设备(GPS/IMU)、1 台高分辨率全景相机、2 台RIEGL 公司不同型号的激光扫描仪VZ-400 和LMS-120i、1 台同步控制单元以及4 台工控计算机。该车载LiDAR 移动测量系统将所有高精度传感器安装在车顶平台,并通过系统标定建立严格的几何关系,同时采用计算机时钟和GPS 作为时间基准,通过同步控制系统,保证所有传感器与平台的运动和姿态同步进行。当车辆以一定速度匀速行驶时,GPS 和IMU 同时观测并记录各传感器的位置和姿态数据,地面激光雷达和全景相机以一定采样频率开始扫描和拍照,所有传感器都受控于车载计算机系统,并通过同步控制系统触发脉冲来实现数据同步采集,在完全依靠动态GPS 和IMU 的情况下,整体精度一般在厘米级,从而实现全方位场景下的三维点云信息和纹理信息的快速获取。
(2)点云和影像数据采集
数据采集时需要综合考虑道路交通拥挤状况、天气状况、周边环境等,天气选择在天空晴朗的时间段,数据成果设置为*.pgr 的格式。数据采集完成后,做好数据下载和备份工作,同时对采集的数据进行完整性检查。全景相机是按照固定的频率采集周边环境照片,在进入测区拍摄前,需要做好影像预览,调整影像色调和亮度,进行白平衡等工作。
3.4 数据处理
利用Waypoint Inertial Explore 软件对车载POS 数据及GPS 基站数据进行联合解算。IMU/GPS 在数据处理上通常有两种方式:一是将IMU、GPS 的原始数据同时进行卡尔曼滤波,计算出载体位置和姿态信息;二是将IMU、GPS 的原始数据各自处理,然后再联合解算出载体的姿态信息和具体位置[4]。在定位前,分离出IMU、GPS 数据,并对分离后的GPS 数据进行处理。在数据定位后,根据GPS 天线偏心分量数值,可先解算得到GPS 天线的坐标信息(偏心分量实测获得),再根据IMU 偏心分量及IMU 与激光扫描仪相对位置,计算激光扫描仪的坐标信息(该部分数值由标定资料提供)。利用RiScan Pro 软件对联合定位信息进行处理,得到车载三维激光扫描仪的行迹文件,完成对激光点云的定位定向,确定每个激光点的三维坐标。车载三维激光扫描系统采集到海量的点云数据,由于车辆行驶过程中的颠簸、树木的遮挡、玻璃的透射等各种干扰,点云数据存在冗余及噪声,采用CityScene软件进行滤波以去除噪声点,得到滤波后的点云数据(如图2 所示)。
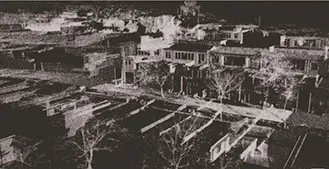
图2 滤波后的点云数据
3.5 地籍成图
(1)软件配置
首先建立数据库,在VsurMap 软件中配置好成图区域的点云、轨迹、照片、数据库等内业成图所需要的内容,之后基于真彩激光点云和可量测全景影像进行要素采集。
(2)地籍要素采集
在地籍要素采集中,可以将点、线要素分类采集,首先进行点状地物的提取,然后在全景照片中使用单全景采集功能采集线状要素,该作业方式可以较好地避免两种不同数据采集方式来回切换,方便作业人员进行操作,以提高工作效率。在地籍要素采集过程中,为辅助判断地物可采用点云与全景联动定位的方法,如在全景影像中采集树木的位置,可自动定位到二维地图中,开展要素采集工作。对于内业无法采集到的特征点数据,则需要人工利用常规测绘仪器进行外业补测,再对各要素进行编辑处理,最后将矢量数据导出为DWG 格式(如图3 所示),完成地籍图的编绘。

图3 地籍图
3.6 精度检查
利用GPS-RTK 和全站仪对部分界址点进行检查,以检验利用车载LiDAR 移动测量系统采集的点云数据精度。在测区不同区域选取30 个明显地物点,对内业成图数据进行检查,利用其坐标差值进行统计,选取的地物点大多数为房屋拐角点,房屋立面无复杂结构,常规测绘仪器能够一次性测量,不会发生误差的累积,部分界址点精度统计数据如表1 所示。
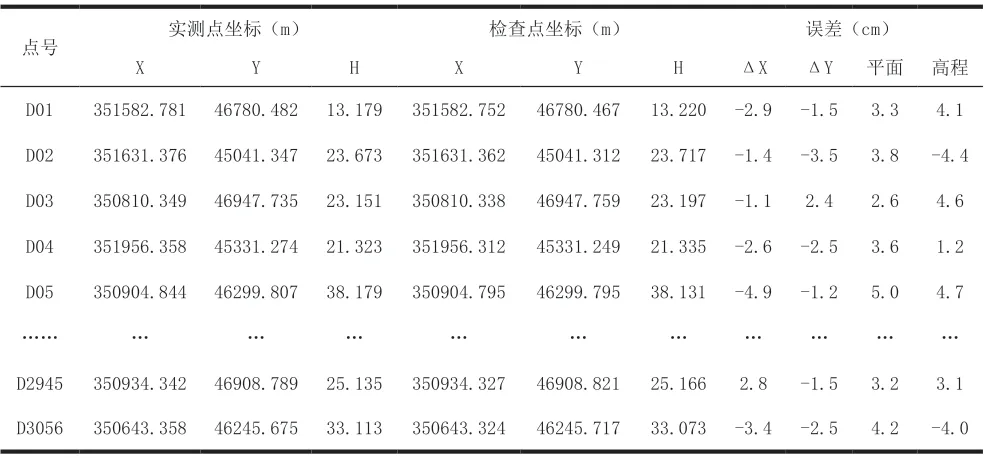
表1 部分界址点精度统计

经式(2)计算,车载LiDAR 移动测量系统的平面位置中误差达到±3.79cm,高程中误差达到±4.88cm,满足地籍测绘规范的精度要求。
3.7 应用总结
任务完成后,项目组将传统地籍测绘方法与车载LiDAR 移动测量系统的生产效率进行了比较:在外业效率方面,利用GPS-RTK 和全站仪测一幢普通民房需要两个人,用时10 分钟左右;而车载LiDAR 移动测量系统,只需不足2 小时就能完成约100 幢房屋的数据采集。在内业效率方面,传统方法需要对数据进行展点,再与草图进行对比,最后绘制出地籍图;而车载三维激光测量系统,可以在导出数据后直接在点云上进行描绘,再经过简单处理就可直接出地籍图。经比较,内业出图效率比传统作图高出3 倍以上。总体来看,车载LiDAR 移动测量系统和GPS-RTK、全站仪的测绘方法相比,生产效率至少提高了5 倍,且精度有保证,应用效果显著。
4 结束语
车载LiDAR 移动测量系统显著提高了地籍成图的速度,既高效又快捷,在道路状况好、GNSS 信号强的地区,数据采集覆盖率、工作效率以及测量精度较高,能够满足地籍测图的需求。试验发现,其主要问题是受GNSS 信号影响较大,道路状况差时,数据采集覆盖率不高。下一步仍需研究的方向是:
(1)采用多种方式相结合来弥补数据采集覆盖率低的问题,如与无人机航测技术相结合,充分利用航测高覆盖率的优势。
(2)提高内业成图软件的自动化水平,例如自动提取建筑物或道路边线等。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
铁道通信信号(2020年8期)2020-02-06 09:13:18
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
中国公共安全(2017年7期)2017-10-13 08:18:11
电子制作(2017年9期)2017-04-17 03:01:00
中国公共安全(2017年11期)2017-02-06 05:28:09
电源技术(2015年2期)2015-08-22 11:28:14