
复杂背景下接触网隔离开关智能识别技术研究
2022-08-02 15:19李世斌胡金东
铁道运营技术 2022年3期
李世斌,胡金东,王 辉,李 团
(1.中国铁路南宁局集团有限公司 供电部,高级工程师,广西 南宁 530029;2.中国铁路南宁局集团有限公司 工电检测所,高级工程师,广西 南宁 530029;3.成都交大光芒科技股份有限公司,工程师,四川 成都 610041;4.中国铁路南宁局集团有限公司 工电检测所,工程师,广西 南宁 530029)
1 引言
接触网隔离开关是高速铁路牵引供电回路重要组成部分,是电气化铁路牵引供电系统重要设备之一,接触网隔离开关可视化系统对于快速隔离故障区域、及时缩小停电范围、及时分段作业从而减轻现场人员的劳动强度,通过智能识别技术实现接触网隔离开关状态自动识别,对于供电设备的高效运行有着重要意义。
国内已有不少相关的技术研究,王丹等[1]提出采用暗通道先验算法做预处理,基于SIFT网开关定位,最后使用Hough 变换相结合的方式实现网开关状态识别。陈富国等[2]提出采用通过翻字牌信息实现隔离开关的状态识别,该算法是间接实现隔离开关的状态识别。腾云等[3]提出采用基于方向梯度直方图(HOG)和支持向量机(SVM)相结合高压隔离开关分合闸状态搜索识别算法,该算法首先采用SVM二分类算法实现开关的目标检测,接着判断开关的边界轮廓。由于接触网隔离开关是安装在室外,环境变化复杂,例如不同光照,天气,异物等影响算法准确识别,已知的研究并没有详细说明复杂环境下的识别技术。本文将结合目标检测技术及多种边缘检测技术及拟合技术,研究复杂背景下的接触网隔离开关自适应精确状态识别技术。
2 接触网隔离开关智能识别技术
2.1 具体方案
接触网隔离开关状态识别,需解决四个主要问题:①不同天气、光照、异物影响下网开关的准确定位;②准确的网开关分割;③连续的网开关状态输出;④不同安装位置对于算法的影响。
接触网开关状态识别采用深度学习及多种边缘检测技术及拟合的方式,具体步骤如下:①通过接触网开关定位技术实现了接触网开关的准确定位;②利用接触网开关目标定位信息,采用复合边缘检测技术实现接触网开关边缘的准确检测,复合边缘检测技术基于多种边缘检测技术及拟合技术实现接触网开关边缘信息准确提取。③在获取到接触网开关边缘信息后,利用标注信息,进行接触网开关开合角度的计算,进而利用配置信息及开合角度实现接触网开关状态的识别,如图1所示。
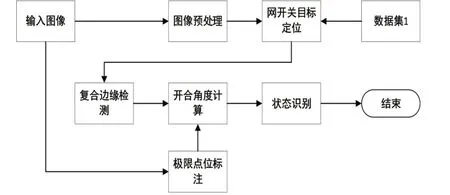
图1 接触网开关状态识别流程
2.2 数据准备
针对接触网隔离开关目标定位算法要求,准备算法数据集。数据集分别来自两个数据源:①现场安装设备所获取的图像;②自行搭建的网开关装置,并安装摄相机取得的图像。为提升算法数据集的有效性,根据技术要求,分别采集不同时间段(早上,上午,中午,傍晚,夜间),不同视角,不同焦距段的网开关图像。通过采用接触网隔离开关远动控制系统远程控制接触网网开关的分合状态或者手动控制接触网隔离开关的分合状态,采用视频记录的方式获得了接触网开关不同状态的视频图像。现场图像因为安装点位的原因,图像的可调视角较小,但是可以调整不同焦距,获得大量图像。自行搭建的网开关装置,可以方便的调整接触网开关的开合状态,并且调整相机的安装角度,这样获取了一定数量的图像数据集:训练数据集2000张,测试数据集500张。典型的接触网开关图像如图2 所示。为了丰富数据集,经过旋转、对比度处理、裁剪、缩放等预处理过程,将训练集由2000张扩充为6000张,测试数据集由500张扩充到2400 张。完成数据集扩充后,采用Labelme 标注工具对数据集进行标注,完成了训练数据集及测试数据集标注。
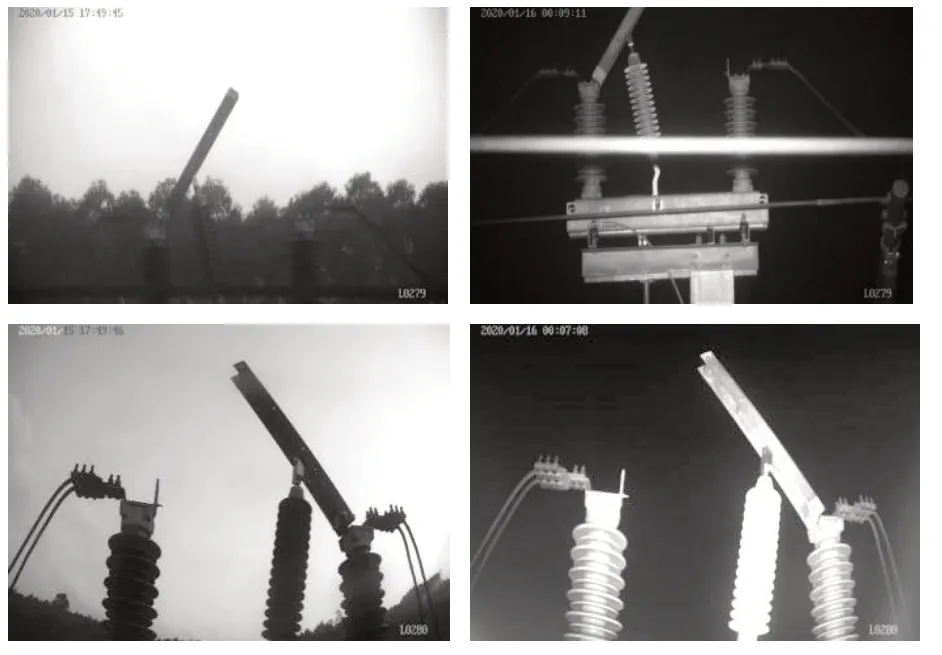
图2 典型的接触网开关图像
2.3 网开关目标定位
2.3.1 网开关定位算法
网开关定位算法采用YOLOv5 基础算法框架。YOLOv5 是一种单阶段目标检测算法,目标检测是计算机视觉处理的基础算法,主要分为传统目标检测算法、基于深度学习目标检测算法。传统目标检测算法典型代表算法:Harr 特征+Adaboost 算法[4],Hog 特征+SVM 算法[5]等。深度学习目标检测算法主要有:RCNN 系列[6],fast-rcnn 算法[7],YOLO 系列[8,9]等。YOLOv5 算法主要在输入端、基础网络、neck 网络、head 输出层等做了优化创新,主要创新点有:引入了masic数据增强,Focus结构、CSP结构、FPN+PAN结构等,使其速度与精度都得到了极大的性能提升。
为了进一步提升算法的效率,用MobileNetV2[10]模型替换YOLOv5 算法模型中的提取模块,MobileNetV2 主要利用了残差连接和深度可分离卷积的思想,该网络模块采用了低维压缩表示的方法,实现了推理过程中不涉及很大的张量,减少了对于计算设备高性能的要求,MobileNetV2构造了两个基础模块,如图3所示。
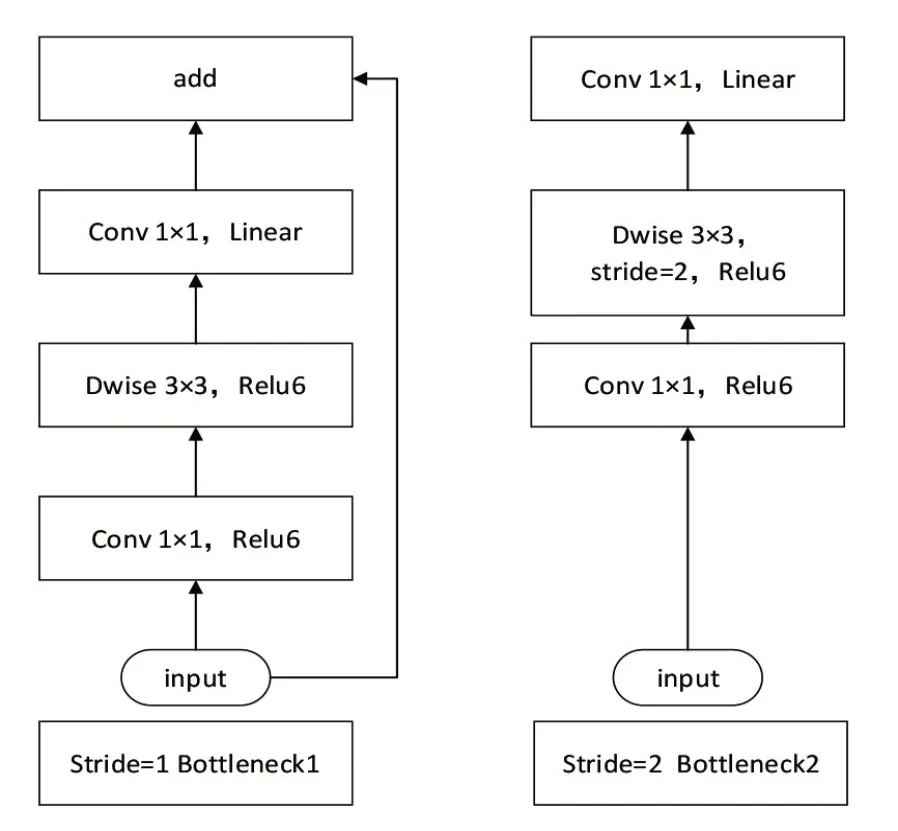
图3 MobileNetV2的两个基本组件
其中,conv 表示卷积操作,Dwise 表示深度可分卷积;Relu6表示激活函数;stride表示卷积操作步长
2.3.2 模型训练
基于网开关定位算法,模型构建完毕之后,开始进行模型的训练。调整的训练参数主要有:优化器,学习率,训练周期,batch-size,图像尺寸,见表1。
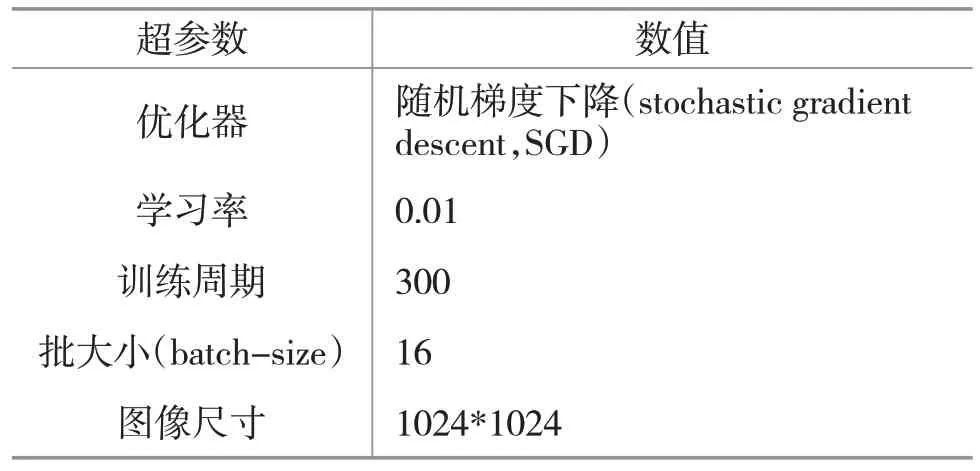
表1 训练参数
接触网隔离开关定位模型的评价指标包含召回率(R,Recall)、精确率(P,Precision)。召回率计算公式如式(1)所示,精确率计算公式如式(2)所示,算法测试结果见表2。
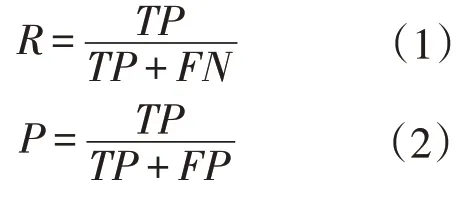
公式1、2 中字符定义:TP(True Positive)为正确定位目标数量,FP(False Positive)为目标错误定位数量,FN(False Negative)为是目标而没有定位数量。
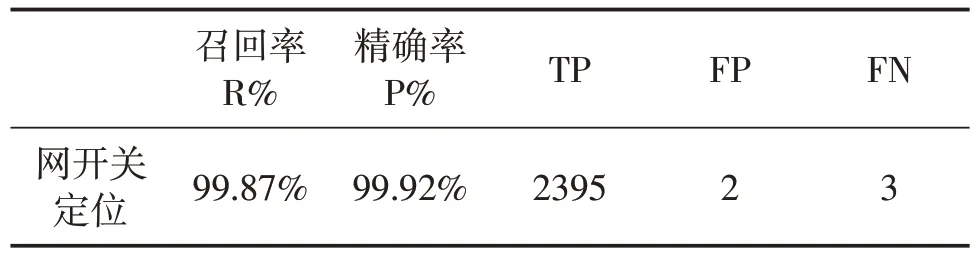
表2 网开关定位算法检测结果
2.4 复合边缘检测
通过网开关定位算法,实现了隔离开关的准确定位,要解决网开关准确的开合角度计算。由于,接触网隔离开关工作场景是户外,这就会遇到复杂的光照环境(白天:晴天,阴天,雨雪天,太阳背光,逆光等;晚上:设备照明),为了克服不同光照、噪声、不同输入形态(彩色图像,黑白图像,异物等)等因素的影响,通过多种直线检测算法及不同参数设置,实现稳定的网开关边缘直线提取与拟合技术,实现稳定准确的网开关边缘线提取,这里称之为复合边缘检测。算法过程如下:
①采用Hough[12]直线检测,LSD 直线检测[13],EDLines 直线检测[14]等算法,每种算法采用不同的参数,实现直线检测。
②针对以上直线检测结果,进行直线拟合,将同方向的直线进行连接,获得长直线,这些拟合直线和原有的直线一起,组成直线集。
③基于直线以上检测结果,删除长度较小以及定位区域外的直线。
④统计每个角度的直线的数量,保留直线数量最大的直线。
⑤去除中间直线,只保留两侧两根直线,并优先保留LSD,EDlines 直线检测结果。这两条直线就是最终的计算直线。图4展示了白天情况下的接触网开关复合边缘检测效果。
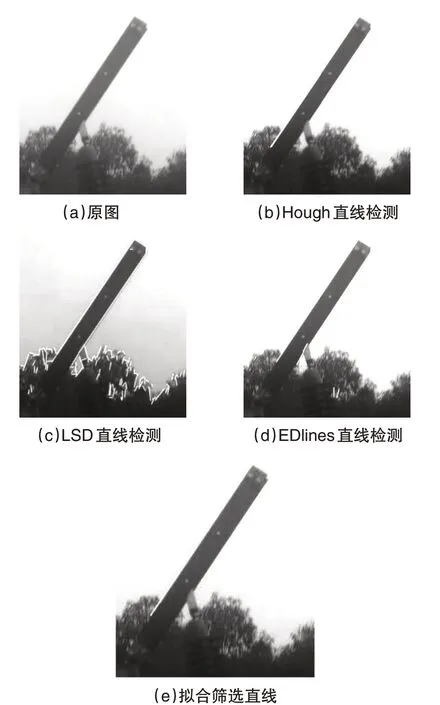
图4 复合边缘检测
基于以上复合边缘检测算法,测试了网开关开合角度计算的准确性,具体测试结果见表3,可以看出测量角度的误差小于0.2度,计算比较准确。
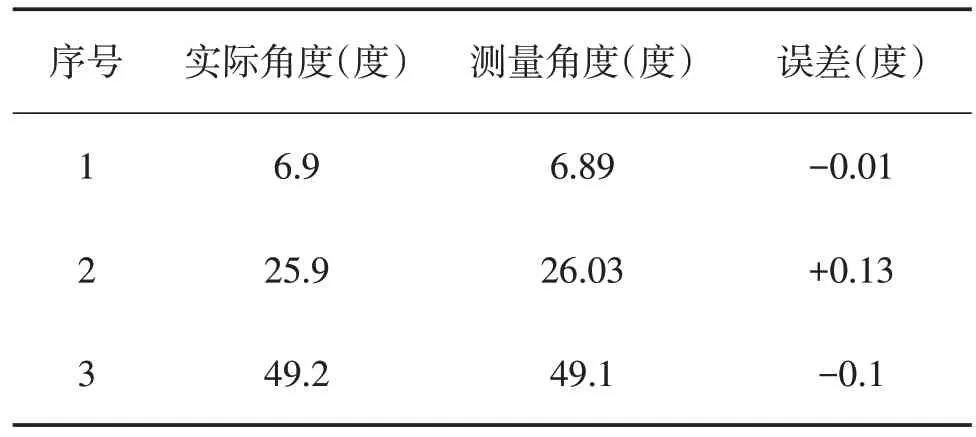
表3 网开关开合角度计算
2.5 开合状态判断
基于准确的复合边缘提取,就可以计算网开关的开合角度,利用已知的先验信息(极限定位标注信息),可以判断网开关的开合状态,根据预设阈值,来判断隔离开关是不是处于不到位状态。接触网开关角度定义见图5。假设接触网开关合闸判定极限角度α,合闸临界角度φ,分闸判定位置β,分闸极限角度为θ,容许角度ε。假设当前获取的接触网开关角度为X,开合状态判断逻辑见表4。
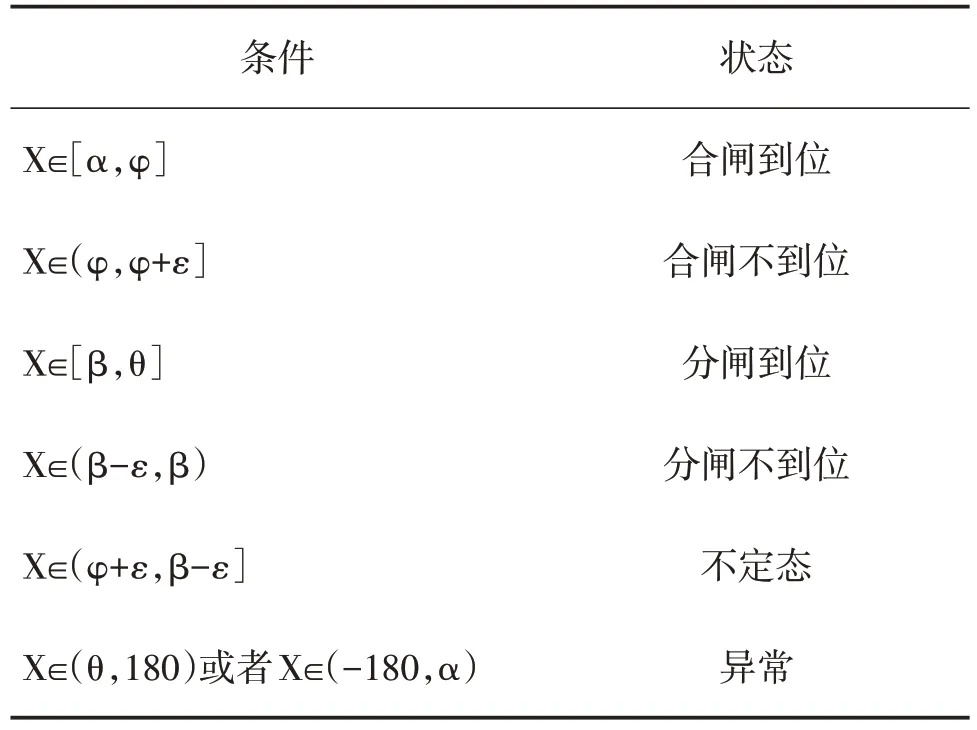
表4 网开关状态判断逻辑
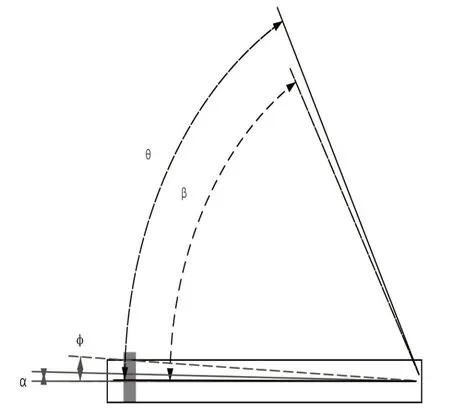
图5 接触网开关角度定义
3 结论
为解决复杂的户外接触网开关的状态精确识别问题,提出一种基于MobileNetV2 特征提取网络进行速度优化的YOLOv5目标定位技术与复合边缘检测技术相结合的接触网开关状态自适应精确识别技术,该技术很好的解决了户外复杂背景下的接触网隔离开关状态识别问题,通过该技术,接触网隔离开关的定位准确率达到99.92%,状态识别精度小于0.2度,且已经应用到现场,取得了较好的实验效果,具备工程应用推广价值。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
云南画报(2021年10期)2021-11-24
建材发展导向(2021年10期)2021-07-16
云南画报(2020年12期)2021-01-18
小学生导刊(2018年13期)2018-11-30
小学生导刊(低年级)(2017年2期)2017-06-10
通信产业报(2016年44期)2017-03-13
新高考·高二数学(2014年7期)2014-09-18
幼儿时代·故事妈妈(2004年4期)2004-03-17
雕塑(1999年2期)1999-06-28
