
基于六轴传感器MPU6050 的一种低功耗姿态及深度测量装置*
2022-08-02 02:17:08杜鹏
舰船电子工程 2022年6期
杜 鹏
(中国船舶重工集团有限公司第七一〇研究所 宜昌 443003)
1 引言
六轴传感器MPU6050 是InvenSense 公司推出的全球首款低功耗整合性6 轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了安装空间。MPU6050 也是当下较流行的一款六轴(三轴加速度+三轴角速度(陀螺仪))传感器:该传感器广泛用于四轴飞行器、平衡车和空中鼠标等设计,具有非常广泛的应用范围。
2 系统组成
整个系统由主控信号处理器(MSP430 单片机)、RS-422通讯接口、六轴传感器MPU6050、压力传感器、A∕D 转换电路、数据存储单元组成,其系统框图如图1所示。
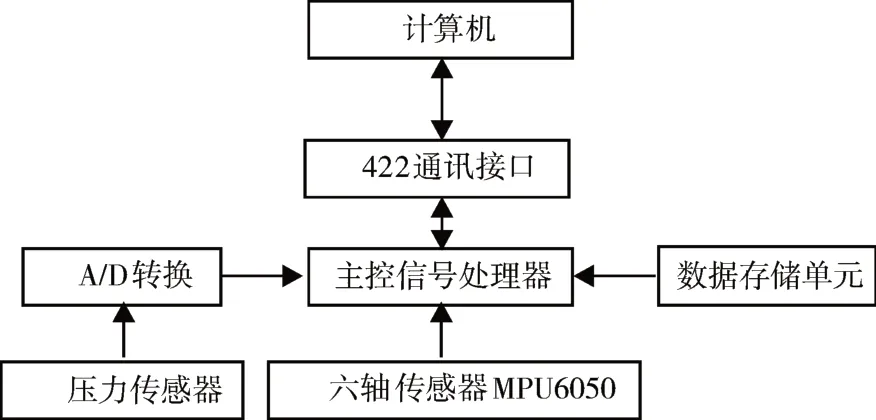
图1 测量装置系统框图
3 硬件设计
3.1 主控信号处理器
主控信号处理器选用的是主控电路采用TI 公司MSP430 系列单片机MSP430F1611 作为主控芯片。 MSP430 系列是低功耗、高性能单片机,电源电压工作范围1.8V~3.6V,工作主频8MHz,具有丰富的外设资源,拥有两个异步串口,两个SPI 接口,128k字节FLASH程序存储空间。设计有看门狗复位电路。
3.2 姿态采样电路
姿态采样电路主要功能是采集试验雷平台的俯仰角、横滚角和航向角。本设计选用集成了三轴加速度计和三轴陀螺仪以及数字运动处理器DMP的芯片MPU6050,采用IIC 通讯,该芯片陀螺仪可测范围为±250,±500,±1000,±2000°∕s(dps),加速度计可测范围为±2g,±4g,±8g,±16g,该芯片功耗低,工作电流最低约10μA,芯片价格低,有利于降低成本,电路图如图2所示。
3.3 深度信号采集
压力传感器一般与由A∕D 芯片、单片机构成的数据数据采集电路配套使用。
深度信号采集电路选用AD 公司AD977 模数转换器,具有16bit分辨率,最大采样速率100KSPS。信号输入范围0~10V。数字接口为SPI接口,采用TI 公司的SN74CB3T3245 实现5V 电平与3.3V 电平的转换。如图3所示。
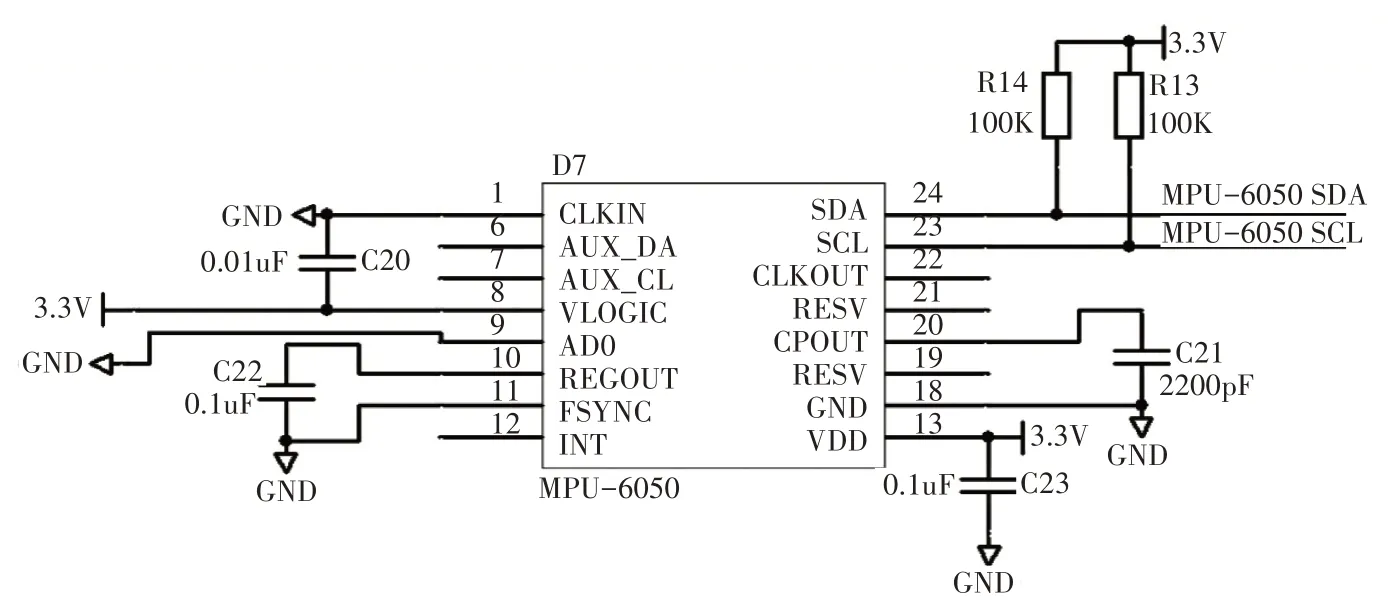
图2 姿态采样电路
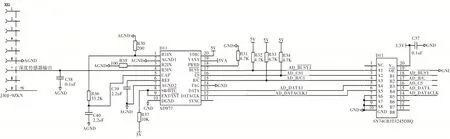
图3 深度采集电路设计
3.4 数据存储电路
试验雷需要记录姿态及深度数据,系统设计了数据存储电路。存储器采用SPI 口铁电存储器FM25H20,数据存储空间为256K 字节。铁电存储器具有存储速度快,数据非易失等特点。系统扩展两片存储器,最大存储容量512K 字节。满足数据存储容量的需求。如图4所示。
3.5 串口通信电路设计
RS422 是比较常见的通讯接口,有很多工业仪器将它作为标准通讯接口,被广泛用于计算机串行接口外设。RS-442 实现双向通讯只需要4 根线,结构简单,价格低廉,并且传输数据稳定可靠,可以用来作为测量装置的通信接口。
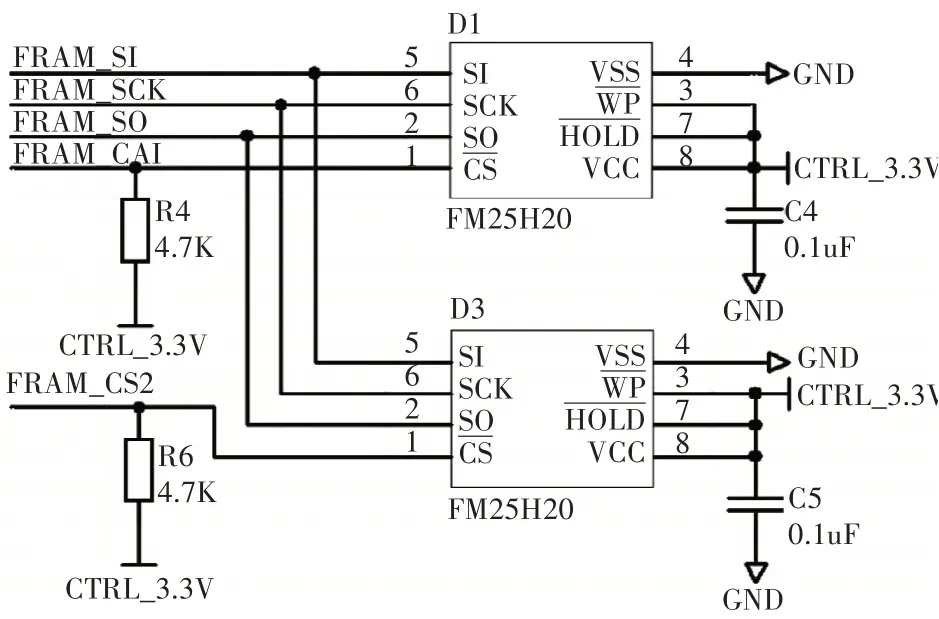
图4 数据存储电路
系统与检测设备之间采用RS422 协议通信。选用MAXIM 公司的MAX3488 作为电平转换电路,单片机异步串口输出MAX3488相连。如图5所示。
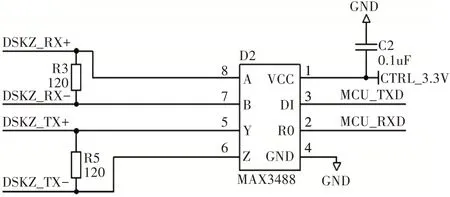
图5 串口通信电路
4 测量过程及原理
试验中,当试验平台完成布放、平台入水后,测量装置通过不断采集平台的深度信息、平台的运动速度、加速度以及姿态等信息,还要具备数据内记等功能,待平台回收后可以通过回收测量装置中的姿态以及深度信息来判断平台在水中的运动轨迹。
测试系统的工作原理:首先利用六轴传感器MPU6050 及压力传感器在各个测试点上进行测量,六轴传感器MPU6050 直接输出姿态数据,压力传感器输出的模拟电压信号由A∕D 芯片采集电路进行采集,并转换成数字信号,再由单片机进行滤波处理、报文封装后存入存储芯片或者通过RS-422 通讯接口转RS-232 传输给计算机。计算机对收到的压力数据按检定规程进行处理并保存数据,生成压力曲线并显示出来。
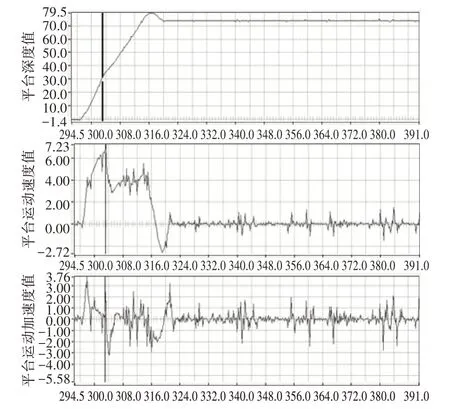
图6 加速度曲线
5 性能验证
在完成了设计后,在湖上进行了试验,测量装置记录了姿态的同时还记录了深度数据,通过对所获取的试验数据分析复算表明,所获得的数据有效,满足各项技术指标所要求的内容;试验结果如图6所示。
6 结论
系统湖上试验结果表明:
1)姿态测量装置具有响应速度快,抗干扰能力强以及运行稳定等优点,功能上可较好地满足姿态及深度测量需求。
2)姿态测量装置具有功耗低,满足可在水下进行较长周期测量的设计指标要求。
7 结语
本文提出了一种基于六轴传感器MPU6050 的水雷在水下姿态及深度设计方案,并给出了测量过程及方法。湖上试验结果表明,该装置硬件功能正常,策略有效,可用于水雷的姿态测量,同时也可以为其他功能类似的测量装置设计提供借鉴。
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
电子设计工程(2015年15期)2015-02-27 12:07:30
河南科技(2014年10期)2014-02-27 14:09:18
