基于ROS的室内移动抓取机器人研究与实现
2022-08-01 04:04闫赟
现代计算机 2022年11期
闫 赟
(西南交通大学计算机与人工智能学院,成都 611756)
0 引言
移动抓取机器人的任务是利用相关的传感设备完成对周围未知环境的感知和目标位姿的估计,并搭载自主移动平台和机械臂完成对目标的抓取。随着科技的发展与人们生活水平的提高,移动抓取机器人在生活中扮演着越来越重要的角色,在医疗、工业、物流、服务等行业均得到广泛的应用。此外,工业和信息化部近日印发的《“十四五”机器人产业发展规划》指出,要推进人工智能、5G、大数据、云计算等新技术与机器人技术的融合应用,推进机器人应用场景开发和产品示范推广。因此,开展室内移动抓取机器人应用的研究与实现对机器人产业发展具有一定的积极作用与现实意义。
在目标位姿估计方面,深度学习的蓬勃发展为其注入了一股新的能量。随着在实例级物体上的6D 位姿估计趋于成熟,在类别级物体上基于深度学习的6D 位姿估计方法大量涌现。例如,以SSD-6D为代表的基于对应点的方法,以EfficientPose为代表的基于模板的方法,以PVNet为代表的基于投票的方法等,相较于传统方法都展现了较大的性能提升。
本文对移动抓取机器人中涉及的关键技术进行研究,如建图与导航算法,基于深度学习的目标位姿估计算法等,并在真实机器人上进行实验,实现了一个室内移动抓取机器人系统原型。
1 建图与导航
1.1 地图构建
当机器人处于未知环境下时,首先需要借助传感器数据完成本体位置的定位并构建环境地图。在室内环境下,激光SLAM 由于简单易用、可靠性高、精度高等特点而得到广泛使用。本文使用Gmapping 算法完成地图的构建,该算法订阅机器人关节变换话题和激光雷达扫描数据话题,使用RBPF粒子滤波算法完成二维栅格地图的构建并进行话题的发布。在室内环境下构建的地图如图1所示。

图1 机器人在室内环境下构建的地图
1.2 自主导航
机器人在自主导航的过程中面临的最主要问题就是定位和路径规划。针对这两个问题,在地图构建完成之后,本文基于move_base 算法完成机器人在起止点之间的路径规划工作,基于amcl 完成机器人在地图中的定位功能,框架图如图2所示。其中,全局规划器负责在起止点之间根据最短路径算法计算出一条全局最优路径,局部规划器负责在机器人移动过程中自主修正路径,以避免与随机出现的障碍物发生碰撞。自主导航框架输出Twist 格式的线速度角速度控制指令,控制机器人向目标点进行移动。
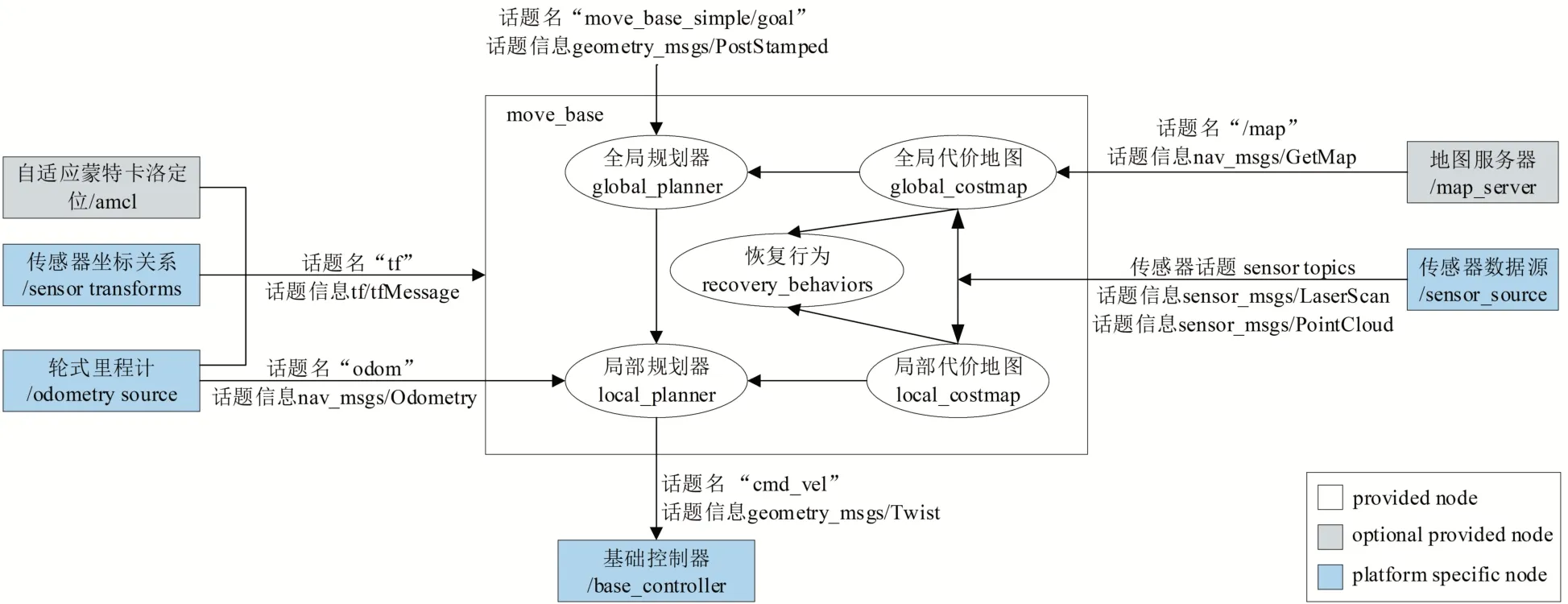
图2 自主导航框架图[4]
2 目标位姿估计
物体在空间中具有6个自由度,即沿三个直角坐标轴方向的平移自由度和绕三个直角坐标轴的旋转自由度。因此,要确定目标在空间中的位姿,就必须对目标的6 个自由度进行计算。本文使用DOPE算法对目标位姿进行估计,通过寻找2D 投影坐标点与3D 边界框之间的对应关系,在已知摄像机内参的前提下,使用PnP算法计算目标在摄像机下的位姿信息。
2.1 2D投影坐标点求解
输入高度为、宽度为、通道数为的原始图片,利用VGG19 的前10 层网络将通道数扩展到512 维,然后使用3 × 3 的卷积核将通道数压缩到128 维,并将其输入到多阶段处理器中。在多阶段处理部分,每个阶段以主干网络提取的特征图和上一阶段的输出作为输入,以充分利用上一阶段中丰富的上下文信息,通过全卷积网络结构将特征图从多维压缩到一维,输出目标3D 边界框的2D 投影坐标点。其可视化结果如图3所示。

图3 目标3D边界框的2D投影坐标点
2.2 目标位姿求解与发布
在使用PnP 算法计算目标在摄像机下的位姿信息前,需要先获取摄像机的内参信息。本文使用张正友标定法对摄像机的参数进行标定,该方法因标定精度高、易操作等特点而被广泛使用。通过该方法标定得到的摄像机内参矩阵如下:
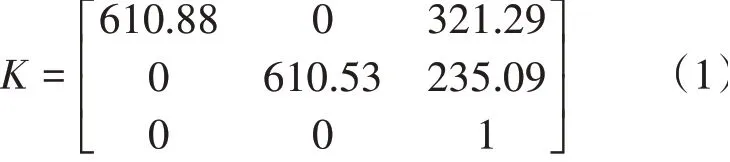
在已知摄像机内参矩阵、目标三维边界框大小的前提下,便可以基于PnP 算法由上一小节得到的2D 投影坐标点求解得到目标相对于摄像机坐标系的平移矩阵和旋转矩阵。此外,由于本文需要控制机械臂对目标执行抓取动作,因此需要创建一个ROS 节点,订阅目标的位姿信息,并发布目标到机械臂末端的坐标变换关系。其可视化结果如图4所示。

图4 目标位姿及其坐标变换关系
3 实验结果与分析
3.1 实验环境
为了验证以上算法在实际应用中的可行性,本文将其在真实机器人上进行了部署,并在室内环境下进行了测试。其中,实验软硬件环境见表1。
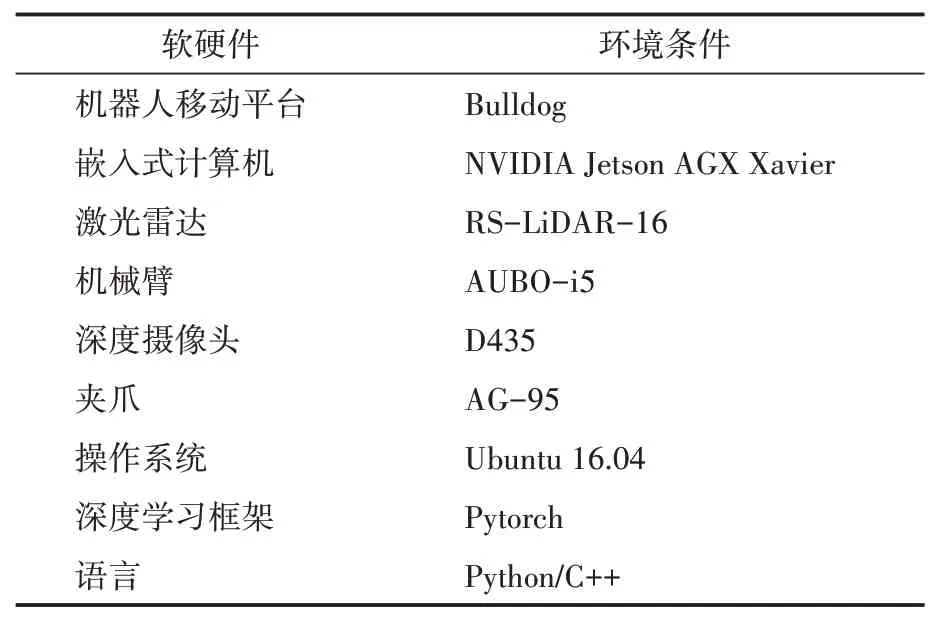
表1 实验软硬件环境
真实机器人系统硬件结构如图5所示。

图5 真实机器人系统硬件结构
3.2 实验结果
在实验中,本文首先控制机器人对室内环境进行建图。地图构建完成之后,将机器人引导至起始点,并向其发布终点位置信息。此时,自主导航算法将在起始点与终点之间自动构建出一条最优路径,并发布速度控制指令控制机器人运动。如图6所示。
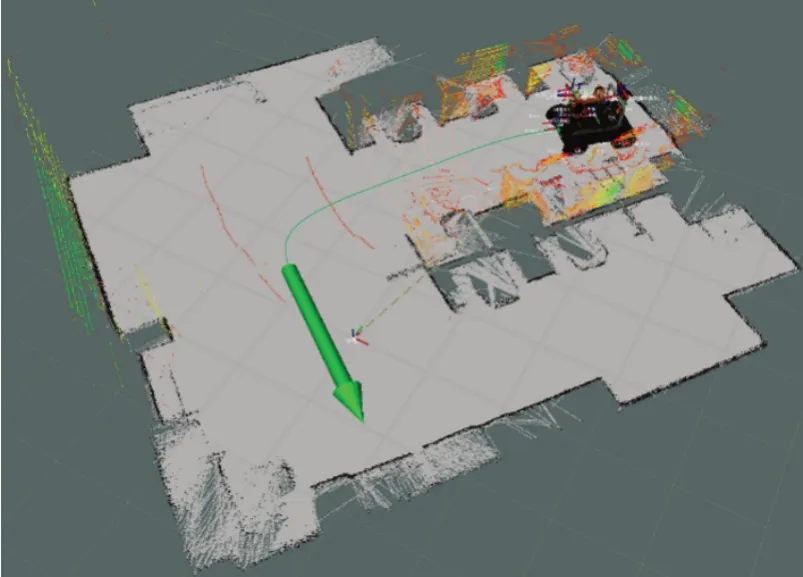
图6 自主导航算法最优路径规划
机器人抵达终点之后,发布“Goal reached”文本信息。然后,机械臂运动规划器引导机械臂到达抓取姿态,摄像头扫描当前视角下有无目标物体。若发现目标物体,位姿估计算法对其位姿进行估计,并启动节点发布目标物体到机械臂末端的坐标变换关系,机械臂运动规划器根据期望位姿求解机械臂各个关节的转角,引导机械臂到达期望位姿,对目标物体执行抓取动作,并将其放置于期望位置。整个抓取过程如图7所示。

图7 机械臂抓取过程
实验结果表明,以上算法在真实机器人上有比较好的应用效果,具有较高的建图与导航精度,并能较为精准地抓取到目标物体。
4 结语
本文对室内移动抓取机器人实现过程中涉及到的建图与导航算法、目标位姿估计算法进行了研究,并基于ROS 在真实机器人上进行了实验,取得了比较好的应用效果,验证了这些算法在实际应用中的可行性。随着机器人智能化水平的不断提高,机器人的应用领域也更加广泛,本文为机器人在移动抓取方面的应用实现提供了一个系统原型,具有一定的现实意义和实际应用价值。
猜你喜欢
当代工人(2020年8期)2020-05-25
知识文库(2019年24期)2019-12-30
知识文库(2018年3期)2018-10-20
奇闻怪事(2018年9期)2018-09-28
小溪流(画刊)(2017年12期)2018-01-10
现代装饰·理论(2016年1期)2016-03-01
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
数码(2009年3期)2009-03-16
数码影像时代(2009年1期)2009-02-12