基于Baidu地图API的运输车辆安全驾驶行为分析
2022-07-29 14:12:28陈威仰
计算机时代 2022年7期
陈威仰
(广州华商学院数据科学学院,广东 广州 511399)
0 引言
近年来,随着我国经济水平的提升,汽车的普及率越来越高,汽车不良驾驶行为的数量也随之上升。车联网技术的飞速发展,让道路运输等相关管理部门可以对车联网数据进行处理和有效利用。
Baidu 地图API 是由百度公司提供的Baidu 地图开放服务接口,支持基于经纬地点搜寻、规划路线、导航定位等地图应用功能,该API 使用优点在于即调即用,方便快捷。本文借助Baidu 地图API 对车联网数据进行分析研究,通过挖掘潜在的非安全驾驶行为来为有关管理部门提供帮助。
1 运输车辆路线及行车指标分析
本文基于一些运输车辆的原始行车轨迹数据,对车辆的运输路线以及其在运输过程中的速度、加速度等行车状态进行提取,数据格式如表1所示。

表1 原始行车轨迹采集数据结构
1.1 基于Baidu地图API绘制运输车辆路线
根据数据集中的经纬度数据,可以得到车辆运输路线的起始地点以及所有中间途径点记录,借助Baidu地图API来绘制路径即可获得车辆运输线路图。因Baidu 地图对外开放的API 是最方便快捷的调用方式是使用JavaScript语言调用,所以需要把数据的文件格式转换为方便JavaScript 操作读写的JSON 格式。通过jQuery 的Ajax 技术,模拟读取服务器返回值的方法,来读取本地文件的数据内容,将.json 文件中的JSON 数据以返回体的形式返回给浏览器客户端,结合Baidu 地图API 进行绘图编程。这部分的核心实现代码如下:
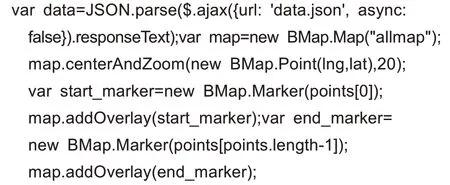
绘画得到的车辆运输路线如图1所示。

图1 基于Baidu地图API绘制的车辆运输路线图
1.2 分析计算运输车辆的行车指标
车辆在移动的过程中,坐标位置会发生相对变化,所产生的距离即为里程。计算实际行驶的里程需要获取所有前后移动的坐标点的距离,然后进行叠加运算,即可用公式⑴计算获得车辆在该线路内的实际行驶里程。

其中,为实际行车距离,为坐标点的个数,S代表的是第个点到第1个点之间的距离数据。
借助Baidu 地图API 自带的坐标点间距离的计算功能,获得行车数据里某一车辆两个坐标点间的行驶距离,累加该车辆在某一线路所有坐标点间的距离,可以得到该车辆在该线路内的实际行驶里程。值得注意的一点是,如果两个坐标点之间的采集时间相差过大时,应当认为这两个坐标点隶属于不同路线。为此,我们假设当采集时间差距超过一分钟时,车辆开始行驶不同的路线,不同路线之间的里程不做叠加计算。本文考虑到Python 语言较强的数据处理能力以及出色的操作便捷性,使用Python 完成了所有的数据操作和运算。
获得车辆对实际行驶里程后,根据对应线路采集到的行驶时间t,可以计算得到里程内的平均速度:
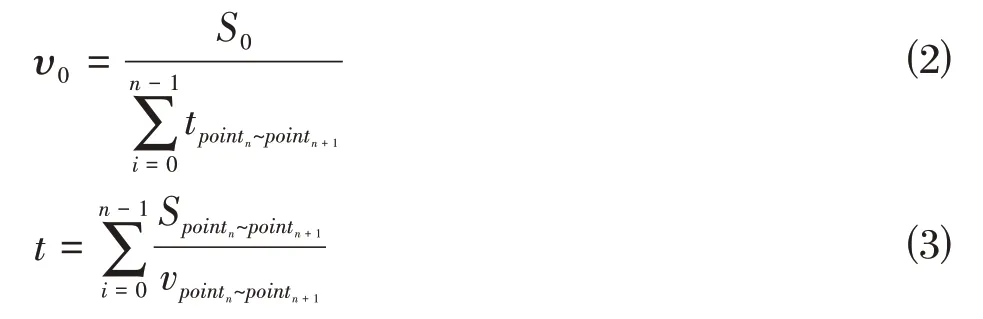
其中,为平均速度,t为第n 个点到第n+1 个点之间的行驶时间,t为实际行车花费的总时间。
观察车辆的平均速度变化,假设一前一后两段里程的平均速度发生较大幅度的改变,即可认为该车辆进行了急加速或急减速。根据速度计算公式⑷:

可以得到加速度计算公式⑸:

随机抽选10条车辆行车轨迹采集数据,计算行车过程中的行车指标,如表2所示。

表2 某10辆车辆行车过程中的行车指标
观察表1,平均速度偏高甚至严重超速的车辆,急加速减速的次数明显高于其他正常驾驶速度的车辆。可以进一步假设,频繁的急加减速的车辆更容易表现出不安全的驾驶行为。车辆事故的发生,往往是由于车辆间的距离小于车辆反应距离和刹车距离。因此,两车间最小距离大于车辆反应距离和刹车距离可以规避事故的发生。假设司机从制动到停下来的时间为,开始的速度为,则反应距离s如公式⑹所示。

最小两车距离主要由刹车距离决定,而刹车距离又与车速密切相关,根据交通工程学科经验,用式⑺可以计算前后两车最小间距:

其中,是刹车时司机在反应时间内汽车行驶的距离,是刹车时从制动器开始起作用到汽车完全停止行驶的距离,为制动距离,是与路面阻力、湿度、坡度等因素有关的系数,是两车之间的安全距离,是车辆的标准长度。司机要在中刹车停住才不撞上前一辆车,所以汽车之间的安全行驶间距应该符合式⑻的条件。

1.3 行车安全多因素的层次评价分析
根据上文提到可能影响行车安全的行为因素如下:车辆的平均行驶速度、车辆行驶的距离、车辆行驶的时间、车辆的反应距离、车辆的急加速减速情况。由于五个因素相互影响,它们的排列组合将会对行车安全产生不同的效应,以是否为安全驾驶行为作为目标层,通过严格的分析,对以上五个切实的因素拟定关系并评分作为准则层,比较最终的方案层安全行车与不良驾驶后的影响。建立如下层次分析结构,如图2所示。

图2 层次分析结构
构造判断矩阵,就车辆的5个切实指标,进行两两比较并评分,评分权重如表3所示。

表3 准则层要素对决策目标的排序权重情况
计算判断矩阵A-C,结果如表4所示。

表4 判断矩阵A-C
综合以上数据,计算得出方案层中要素对决策目标的排序权重:安全驾驶权重为0.8670,不良驾驶权重为0.1330,可以看出在权重上,安全行驶比不良行驶大0.734。这也意味着,车辆在尽可能遵守安全行车原则的前提下,很大概率是安全驾驶行为。
2 运输车辆安全驾驶行为评价模型
一般来说,影响行车安全的内因有车辆本身的安全、效率、节能等因素,而外因多数是天气原因。设定安全驾驶的评价指标集合={安全,效率,节能,天气},采用模糊综合评价法,对运输车辆安全驾驶行为进行综合评价。基于评价指标集合确定评语集合和模糊评判矩阵。
对于安全性={很安全,比较安全,一般,不安全},对于效率={很高,较高,一般,不高},对于节能={很少,较少,一般,很高},对于天气={很好,较好,一般,不好},对于路况={很好,较好,一般,不好}。
假设有50%的人认为很安全,30%的人认为比较安全,20%的人认为比较一般,没有人认为不安全。安全性的评价结果就是(0.5,0.3,0.2,0),以此类推的效率评价结果是(0.4,0.3,0.2,0.1),节能评价结果是(0.3,0.2,0.4,0.1),天气评价结果是(0,0.3,0.6,0.1),路况评价结果是(0.2,0.3,0.2,0.3)。构建矩阵如下:


针对上面的指标集合,设权系数向量取为=(0.3,0.4,0.1,0,0.2)。利用模糊矩阵的乘法和加法计算综合评判矩阵,计算公式为:

定义模糊矩阵的乘法和加法分别为:


一般的,对=(b,b,…,b),令:

综上可以得到行车安全的综合评价模型:

该模型可以基于实际场景进行评价值的修改和调整,因地制宜地评价客观条件下的行车安全状况。
3 结论
在真实的行车数据的基础上,本文结合Baidu 地图API、计算机面向对象编程技术以及数学模型进一步挖掘出数据背后的行车驾驶行为。基于模糊综合评价模型构建的运输车辆安全驾驶行为评价模型也是能简易直观地反映驾驶行为是否符合安全规范,可以有效协助有关部门针对车辆安全问题快速做出判断和决策。
猜你喜欢
车迷(2017年12期)2018-01-18 02:16:12
中国宝玉石(2017年2期)2017-05-25 00:37:11
中国宝玉石(2017年1期)2017-03-24 09:19:42
汽车与安全(2016年5期)2016-12-01 05:22:12
专用汽车(2016年4期)2016-03-01 04:13:39
专用汽车(2016年1期)2016-03-01 04:13:08
读写算(上)(2015年6期)2015-11-07 07:18:00
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
汽车维护与修理(2015年7期)2015-02-28 12:17:57