
基于MCSA的船舶齿轮泵齿轮损伤故障诊断方法
2022-07-25 01:00李霁舟
中国修船 2022年3期
李霁舟
(武汉理工大学, 湖北 武汉 430063)
齿轮泵常作为船舶输油泵使用。齿轮泵运行过程中,油液污染或空化等容易造成齿轮的损伤,其在齿轮损伤状态下运行会导致齿轮振动加剧,同时影响供油稳定。因此监测齿轮泵的齿轮损伤状态,保障齿轮泵安全可靠地运行对输油系统具有重要意义。如今,普遍使用的齿轮泵故障诊断方法是将传感器安装在系统之中,对传感器获得的振动信号、加速度信号等进行分析。姜万录[1]将小波变换理论应用到齿轮泵故障的振动信号处理中,获得较好的诊断效果。高英杰等人[2]提出了一种基于小波包分解和小波系数残差分析的齿轮泵状态监测方法,通过分析液压泵出口处的压力等相关信号,成功实现了液压泵的故障诊断。然而在船舶机舱环境中,以上方法适用性不高,且由于管路复杂不方便安装传感器、干扰信号过多等,使得诊断的可靠性欠佳。
电机定子电流分析法(MCSA),原理为电路中磁通量受到转子系统因素变化的影响,而磁通量的改变会导致电机定子电流产生变化,转子运行特征就可以在定子电流中得到响应[3]。所以电机定子电流信号可以真实可靠地反映出齿轮泵运行工况。依据此原理,本文提出一种依靠监测定子电流信号诊断齿轮泵齿轮损伤故障的方法,对比传统安装传感器的监测方法,此方法不用拆卸或在系统内部加装各种部件,降低成本的同时保证了系统的稳定性,信息传递简单直接,降低了其他因素的干扰。本文通过建立齿轮泵-电机机组仿真模型验证该诊断方法,结果表明,本方法可通过分析故障信号的特征频段,诊断齿轮泵齿轮缺损故障。
1 MCSA齿轮泵故障诊断流程
本文通过MCSA对船舶输油泵的齿轮故障状态进行监测,通过电流传感器获得齿轮泵在运行状态下的电流信号;使用奇异值分解法(SVD)对电流信号进行处理,去除工频干扰,突出齿轮损伤状态下的信号特征,并与正常工况下的电流信号进行比对,寻找到对应故障的特征频段并总结故障判据。在齿轮泵实际运行中,获得其实际的电流信号,进行处理后与故障判据进行比对,判断故障是否发生,达到对齿轮缺损这种典型故障进行监测的目的。MCSA诊断流程图如图1所示。

图1 MCSA诊断流程图
2 MCSA齿轮泵故障诊断原理
在电机-泵机组中,受齿轮泵运行状态的影响,电机会出现转速波动,造成电机转子的转差率s、功角δ的大小出现相应规律的振荡,影响异步电机内部磁场关系,使得输出电参数产生相应的波动[4]。当转子的转速发生波动时,电机转差率及功角的变化如下:
s=1-ωr0=s0+smcos(λt+α),
(1)

=δ0+Δδ,
(2)
式中,ωr0为电动机转子无振荡负载下的角速度,λ为振荡频率,t为时间,ω为旋转角速度,α为振荡初始相位,s0为标定转差率,sm为转差率的振荡幅值大小,δ0为功角基值,Δδ为功角的波动量。
当功角发生正弦振荡时,会导致定子电参量直轴电流id、交轴电流iq产生振荡分量Δid和Δiq,其振荡频率与转速的振荡频率一致,振荡规律也为正弦或余弦振荡。
电机运行过程中d轴转子与定子A相轴线夹角设为θ,其中θ≈t+θ0,θ0为d轴转子与定子A相轴线初始夹角。定子A相电流波动量ΔiA为:
ΔiA=Δidcosθ-Δiqsinθ。
(3)
齿轮泵转动引起小波动时,由于稳定转速远大于瞬时转速的波动量,可忽略转速波动造成的夹角频率小波动。定子电流波动量为:

(4)
式中,K1、K2为根据电机负载参数计算出的常数。
(5)
(6)
式中,Xm为互感电抗,Um为电压幅值。
从公式(4)可看出:当齿轮泵的转速发生小振荡时,可造成定子的输出电流为稳态时的电流基值上增加一定的振荡分量,其振荡规律与转速振荡频率有关,表现为若干频率正弦或余弦信号的叠加,因此通过诊断定子电流信号可以对齿轮泵的故障进行诊断。
3 数值仿真模型的建立
3.1 齿轮泵数值模型搭建
齿轮泵相关参数见表1。本文以船用的某外啮合齿轮泵为例,依据表1,通过solidworks搭建齿轮泵几何模型。

表1 齿轮泵相关参数
根据齿轮泵的工作原理,提取内流道,将其划分为吸油区、排油区、转子区3部分,利用Simerics-MP软件导入建立的STL格式的内流道几何模型,通过PumpLinx软件对齿轮泵流体区域进行网格划分[5]。
模型各项仿真参数如表2所示。设置边界条件为:压力入口,压力出口。求解参数设置为瞬态求解,湍流模型采用RNGk-ε模型,假定仿真过程中油温保持在20 ℃。
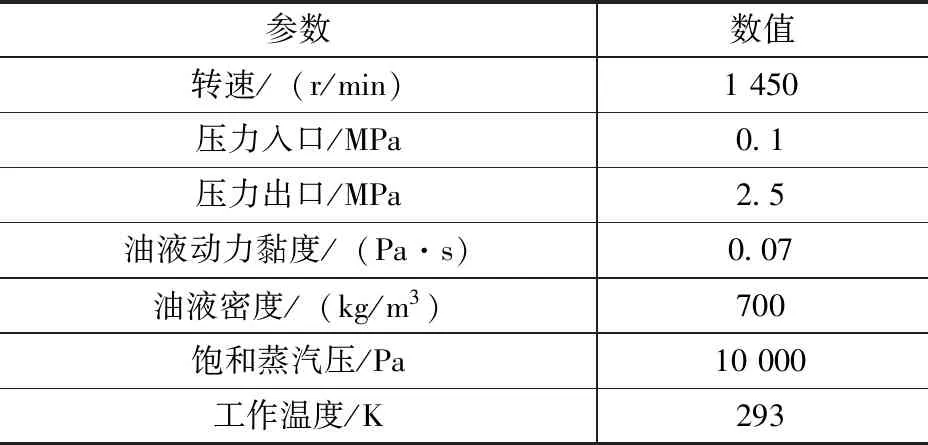
表2 模型各项仿真参数
在正常的齿轮泵齿轮上设置损伤缺口,重复上述操作,分别对正常状态下、齿轮缺损状态下的齿轮泵进行仿真,得到齿轮泵在这2种工况下的水力负载转矩,作为电机的拖动负载。
3.2 电机simulink数值仿真模型搭建
本文以某型号电机为研究对象,基于交轴-直轴坐标系下的电机标幺值方程搭建,电机参数如表3所示。
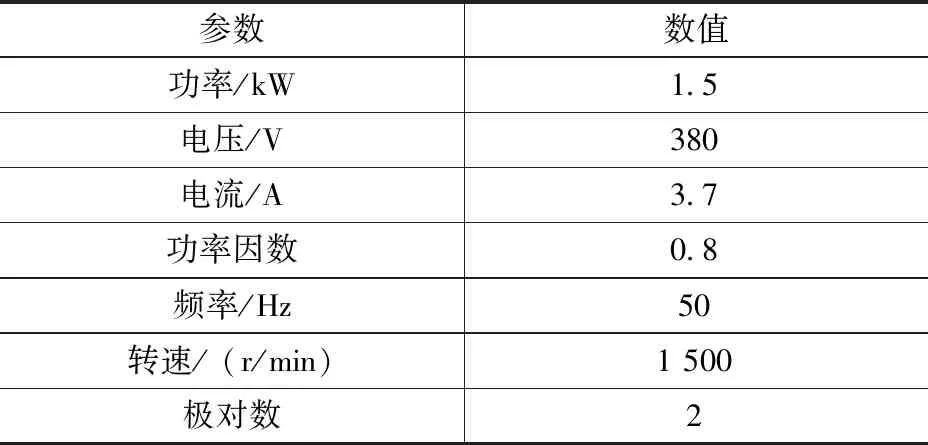
表3 电机参数
本模型主要包括三大模块,即电机主体模型、齿轮泵负载模块与转速计算模块。主体模块包括电压交轴-直轴转换模块,电感电阻计算模块,磁链计算模块,电磁转矩计算模块。本模型实现的功能是模拟电机内部的电流变化及电磁转矩的计算。齿轮泵负载模块是实现将齿轮泵的水力负载转矩信号作为电机的机械负载输入电机,电机-泵联合模型如图2所示。

图2 电机-泵联合模型
仿真模型搭建好后,分别将正常状态与齿轮缺损状态下的齿轮泵水力负载转矩输入电机模型并进行仿真,设置仿真步长为0.001 s,设置仿真时间为5 s,由于仿真前1 s电流信号不稳定,取2~5 s的电流信号进行分析。
4 数值仿真信号分析
4.1 电流信号故障分析
基于MCSA定子电流法提取的电流信号中包含了较多的干扰因素,其中反映齿轮泵运行状态的特征信息以对电网频率调制的方式蕴含在电流信号中,且电网工频分量在整个电流信号中占据主导地位[5]。通过对电机电流信号进行傅里叶变换,得到未经SVD处理的电机电流信号频谱图如图3所示。
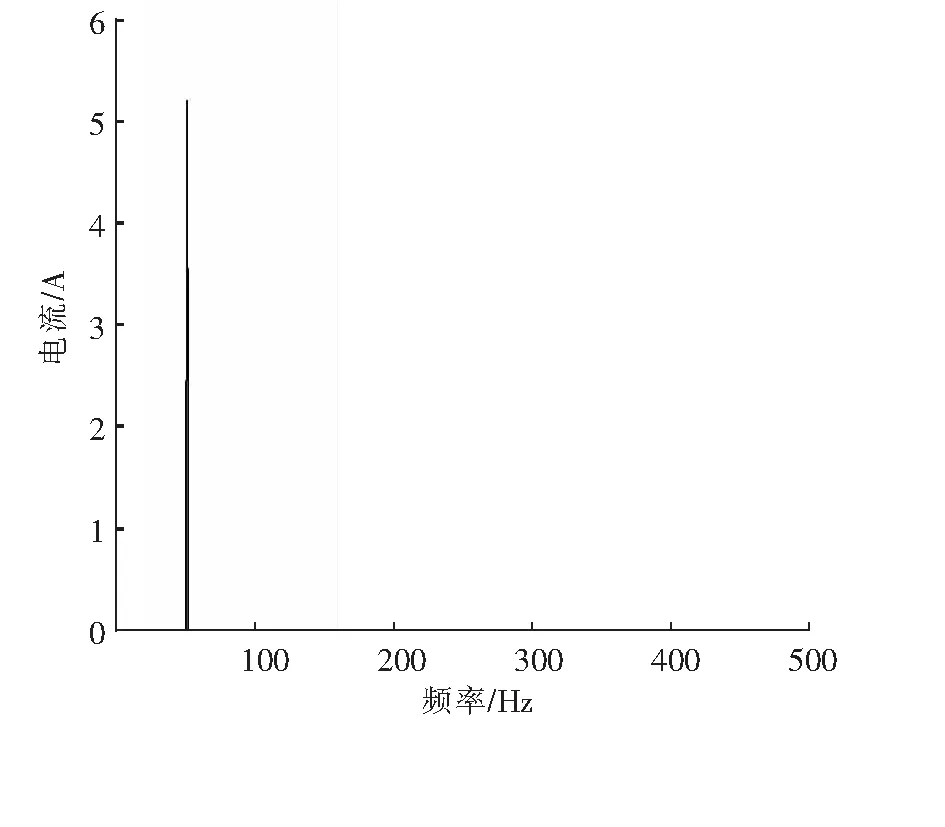
图3 未经SVD处理的电机电流信号频谱图
由图3可知,50 Hz工频信号将诊断所需的特征信号覆盖淹没,因此剔除电网工频分量、提高反映齿轮泵运行状态的电流分量占比是寻找电流故障信号特征的有效手段。
4.2 基于SVD的电流信号处理
现代信号处理技术中,SVD对于提取处理弱信号特征有较好的效果,相比于传统的快速傅里叶变换的信号处理手段,通过矩阵变换的形式,对观测信号进行处理更加迅速,且稳定性更高[6]。由于电机在启动后第1秒内电流信号并不稳定,则取第2秒后电流信号作为测量信号。
通过C-C法与Cao方法,计算得出延时时间为23,嵌入维数为20,对观测信号进行相空间重构,得到观测信号矩阵。通过SVD对电机电流信号进行处理,去除电网工频后进行傅里叶变换,得到经SVD处理剔除工频后的电机电流频谱图如图4所示。
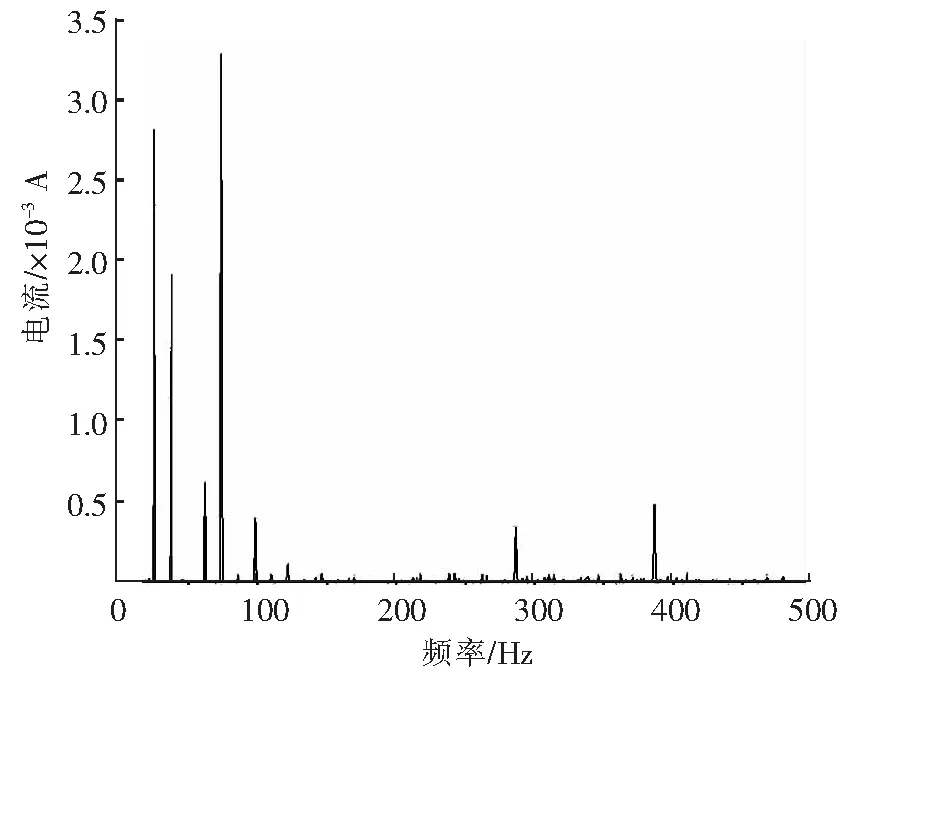
图4 经SVD处理剔除工频后的电机电流频谱图
由图4可知,经SVD处理后,50 Hz电网工频信号被完全剔除,使得其他微弱的信号频率分量得以显现。从处理结果来看,使用SVD分解方法可有效消除电网工频干扰。
4.3 齿轮缺损状态下的电流信号分析
将SVD处理后的正常状态下与齿轮缺损状态下的电流信号频谱图进行对比,得到图5。齿轮泵在齿轮缺损状态下,在fz+fi、fz-fi、fi+1/2fr、fi-1/2fr这4个频段的幅值与正常运行状态下相比,会有明显的减小,相比正常运行状态下的幅值会减弱40%左右。其中齿轮泵的转速频率为fr=24 Hz;齿轮啮合频率是转频的Z倍(Z为齿轮数),即为fz=336 Hz;电网工频fi=50 Hz。此外,在150 Hz~200 Hz的频域内,出现了2个幅值突然增大的频段,在齿轮泵正常工作状态下这2个频段的信号十分微弱,而在齿轮缺损状态下其幅值会有4~5倍的增幅,这2个频段为143 Hz、194 Hz,即1/2(fz-fi)、 1/2(fz+fi),为齿轮泵啮合频率与电网工频调制的频段,本特征也可作为齿轮泵齿轮缺损的诊断特征。

图5 齿轮正常和缺损状态下电流信号频谱对比图
5 结束语
1)通过MCSA可以实现对船舶输油泵的齿轮缺损这一故障状态的诊断。
2)经SVD处理后,定子电流信号的50 Hz电网工频信号被完全剔除,使得原本被淹没的较微弱表征故障的特征频率信号得以显现。
3)齿轮泵在齿轮缺损状态下在不同频段的幅值与正常运行状态下相比,会有一定的减弱或明显增强,可作为齿轮泵齿轮缺损的诊断依据。
猜你喜欢
防爆电机(2022年4期)2022-08-17
北京航空航天大学学报(2022年6期)2022-07-02
辽宁工程技术大学学报(自然科学版)(2022年1期)2022-03-28
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
舰船科学技术(2021年3期)2021-04-12
防爆电机(2021年1期)2021-03-29
科技创新导报(2017年30期)2018-02-03
科学与财富(2017年33期)2017-12-19
电子制作(2017年8期)2017-06-05
