地铁盾构测量方法应用研究
2022-07-22 09:04黄胜
科技创新导报 2022年6期
黄胜
摘要:随着城市轨道交通建设进程的推进,城市拥堵问题得以缓解,城市化进程也得到了进一步推进。对此,应有效保证轨道交通工程的质量,其中,提高施工测量水平尤为重要。论文结合地铁区间隧道的实际工程,论述盾构施工中的联系测量、洞门预埋钢环检查测量、盾构机始发姿态定位测量及盾构机推进施工测量等技术,分析地铁盾构测量方法和相关技术的结合与应用,希望能为相关工程提供参考。
关键词:地铁盾构 地下控制 测量方法 应用研究
中图分类号:U455.43;U231.3
1联系测量
开始进行隧道贯通测量之前,项目团队至少需要开展3次的联系测量工作,即当掘进工作开展至100m、300m及距离贯通面100~200m时,及时安排测量。地下近井定向边方位角较差应<12″,地下高程点高程较差应<3mm,符合要求时,汇总各测量数据,计算平均值,所得结果即为日后测量的起算数据,此类数据对于指导隧道贯通而言有积极意义[1]。联系测量定向采用光电测距导环线完成,最好将导线点安设在避免施工干扰、稳固可靠的地段,从而构建出闭合环。导线边以接近等长为宜,一般直线地段控制在200m以上,曲线地段最少需要控制在70m。于地面控制网中纳入地面趋近导线点,以此平差,通过此方法的应用,可减小误差,同时有助于提高地面趋近点位的精度,在方法应用得当时,可促进定向与地下趋近导线测量工作的高效开展,保证精度。
当项目进行至盾构始发、掘进100m、距贯通面200m时,均有必要安排独立定向,3次联系测量得到的地下趨近导线,其基线边的方位角中误差必须控制在2.5″以内。在整个定向测量过程中,施工人员可以借助强制观测墩控制地面和地下趋近导线桩点。高程传递联合应用到吊钢尺法、光电三角高程法,独立执行3次,误差均≤1mm。
2洞门预埋钢环检查测量
(1)利用极坐标法放样出隧道的中心线与盾构机导轨位置,随后借助水准测量法测量出隧道高程控制线、导轨坡度大小。项目团队必须确保盾构机导轨的位置、高程最大误差维持在±5mm以内。
(2)施工人员可以借助反力架、洞门钢环的位置里程测算出三维坐标,借助该坐标完成放样工作。
(3)在对反力架和洞门钢环进行浇筑之前,项目单位需组织测量人员再次测量设计中心垂直、水平等位置,计算出里程坐标和中心之间的距离。放样和复测中误差不应超过10mm。因此,钢环安装到位且经过定位处理后,由专员复核,发现偏差并及时处理,直至无误为止。施工期间,要求测量控制点与盾构进出洞联导线控制点吻合,同时只有在实测结果通过复核后(复核参与方应包含施工、监理、业主),才能进行后续的墙体混凝土浇筑作业,拆摸后还要再次进行检查,将测量结果当成钢环最终姿态,以便为后续施工提供参考。
3盾构机始发姿态定位测量
盾构机始发姿态定位时,考虑到定位准确性和操作便捷性的要求,可用反力架、始发台辅助作业。其中,始发台能够帮助施工人员确定盾构机的初始空间姿态,反力架则能够在施工过程中为施工人员提供反力,其将直接干扰盾构机始发与推进阶段的姿态。所以,施工人员在进行施工的时候必须充分借助上述两个构件辅助施工。
施工人员借助水准仪、全站仪精准定位始发台,根据盾构机的前体、中体、后体直径,在盾构设备始发轴线、前体和刀盘相连的端面、前中体连接端面等区域均进行标记,直到始发轴线的支距为止,在此基础上,方可检查盾构机在始发台处的姿态,以便精细化调整[2-4]。
盾构机出洞位置的规划方面,应安排在加速下坡地带,同时考虑到始发阶段不能擅自调向,在进行定位的时候,为了防止始发台出现位置偏移、脱离轨道等问题,施工人员可适当抬高盾构机,抬高高度控制在2cm为宜。同时,在进行定位反力架的安装时,施工人员必须确保反力架和环管片始终和始发轴线维持垂直,反力架的左右方向与高程的误差都应控制在±5mm以内,而始发台的水平、垂直方向和反力架的位置误差则应控制在±2‰以内。
4地下控制测量
施工人员借助导线定向测量地面控制点,并顺着坐标方位将其传输至地面近井导线点周边,随后顺着导线点开始往井下投点,并使用导线测量的方法完成定向选择,将其垂直度夹角控制在30°以内。由于洞内安设了大量轨枕、管线,为了降低测量难度,应先安设直伸支导线,令其直径、半径超出800m、曲线段导线边长超出或等于200m,角度误差控制在±1.8″以内,测距相对误差控制在1/80000以内。同时,施工人员需在导线点标记处强制对中点,用10mm厚的角钢充当支架,用6颗Φ12mm膨胀螺栓做固定处理,使其稳定在混凝土管片上,位置需靠近边墙,保证视线距隧道壁一定距离(不小于0.5m),避免旁折光的影响,此举一方面有利于观测的顺利进行,另一方面可减小洞内运渣车辆行驶期间所造成的影响。
盾构向前推进,管片拼装成环,盾尾注浆加固的管片为刚衬砌成型的管片。距离盾构机位置过近的管片容易受到盾构机推进振动影响,混凝土管片稳定性较差,为保证导线点位置的稳定性,要在距刀盘150~200m的位置布设强制对中点。施工人员可以利用已经安装完毕的管片螺栓,找到水准点的位置,并在导线点周边螺栓头棱角处进行标记。观测时,左右角各测6个测回,配套全站仪的精度需在2″以上,平均值之和与360°角之差≤4″;此外,还安排4个测回的边长往返观测,平均值差≤2mm。在延伸控制导线前,先对临近的3个点做详细的校核,判断几何关系是否满足要求,在确认无误后方可向前传递。
对两个相邻已知点加以检查,在保证各自的位置均无误后,进行二等水准实测,测量时施工人员可以将最近点充当基点,从而构建闭合环,误差必须控制在2mm范围内。隧道贯通前,安排3次有关于地下平面、高程控制点的同步测量作业,施测的点位保持一致,要求2次坐标值差≤5mm,高程值差≤2mm,此时可以做加权平均处理,根据所得结果安排控制点的传递,并全面汇总结果,依次上报监理、业主测量队[5-6]。
5盾构机推进施工测量
5.1盾构始发测量
(1)盾构机始发设施的定位测量工作包括盾构导轨、反力架等构件的安装、测量。考虑到反力架、始发台能够给盾构始发提供最初的推力与空间姿态,在安装这些构件的时候,施工人员必须保证盾构的中心坡度和隧道设计轴线的坡度完全一致。为了尽可能避免后续引发沉降等问题,盾构中心轴线需要高出设计轴线10~20mm左右,而反向架的左右、高程偏差则应分别控制在±10mm、±5mm的偏差范围内,盾构姿态与设计轴线水平趋势、竖直趋势的最大偏差分别不大于±3‰、2‰,始发台水平轴线的垂直方向与反力架的夹角不大于±2‰。
(2)待整个盾构机拼装结束后,需要再次進行测量,此次测量的重点就在于对盾构机各个主要部件几何关系进行测量。
(3)施工人员可以借助自动测量导向系统内仪器、棱镜进行测量。盾构机就位之前,施工人员应先通过测量找到动圈的三维坐标,将其与设计标准进行对比,测量人员至少需要对洞口直径的水平、垂直两个方向进行测量,一旦发现其水平、垂直方向的偏移情况超出了设计标准,测量人员应第一时间告知设计院,待得到设计院的确认后,适当进行调整。
(4)在精确测定洞口的三维坐标后,需要确定盾构始发、到达的轴线,定出盾构始发位置,直线段按设计方位,曲线采取割线进行轴线控制,待盾构完全进入隧道内后,逐步按照曲线进行控制。
5.2施工导线延伸测量
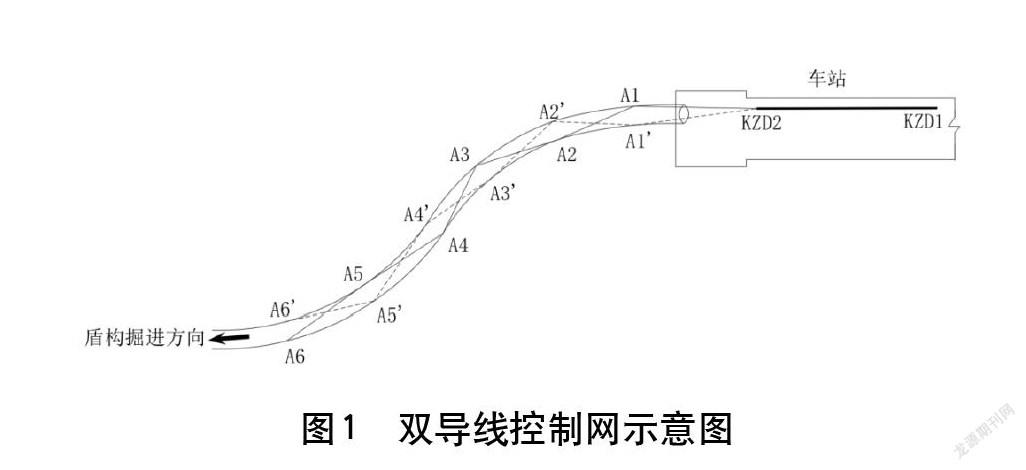
在单向贯通距离较长的盾构隧道,往往施工导线仅是一条支导线,为此,宜采用双导线(图1)或边角网形式布设施工控制网,在控制导线向前延伸时,必须对已有的控制点进行复测,必要时从定向起始边开始复测,保证控制点成果的有效性,并取得足够的测量精度。图中A1~A6与A1’~A6’实为同一控制点,为了便于理解,特意在图上用不同点号进行区分。测量步骤如下:将仪器架设在KZD2上,KZD1为后视点,A1为前视点,水平角与边长各测4测回完成一次测站,记录下水平角、边长等数值;然后将测站点更改为A’,前视和后视目标互换并重复进行上一步操作。以此类推,完成导线测量工作。采用双导线控制网,可以有效检核导线点准确与否,提高长隧道内的控制网精度。
项目单位每次延伸测量施工导线的时候,都需要提前将吊篮安设在已经衬砌好的管片中,根据已经复核过的导线点测量出相应的吊篮坐标,随后移动全站仪,令其位于延伸点。其中,延伸点与刀盘必须保持适当的距离,防止衬砌管片出现初期沉降、盾构机振动导致延伸点位置出现偏移等问题。但具体到实际中,延伸点吊篮并不能随即出现在主控制导线的观测领域,只有在盾构机掘进量达到50m时,才可以借助主控制导线进行符合、校验,将真实结果输入到计算机内,促进后续环节的施工。吊篮安装到位后,用全站仪进行高程传递,校验延伸点坐标和第二次高程,判断是否满足要求,并按照此方法循环推进。
6盾构机姿态人工复核测量
相比而言,盾构机虽有较高的机械化程度和自动跟踪测量,但随着盾构机的推进,还要通过人工对自动测量系统定期复核,盾构机难以直接观测中线、水平,为突破此局限性,应用预留的测量空间测定前视棱镜,明确具体的三维坐标,而后做转化处理,获得棱镜中心与盾构机轴线的平面支距,将其和盾构机制造过程中自身标志点数值进行对比,确保两者的差值与计算机桌面中心、水平偏差相吻合;此外,还需建立线路里程与线路中各点坐标的关系,以便更准确地完成数据的校核。在精准校核的方式下,调控好盾构机的姿态,使其始终在最优推进轴线上运行。
7衬砌环管片拼装检查、隧道净空限界测量
衬砌环管片安装结束后,此时计算机中呈现的管片姿态依然是安装管片之前,以人工测量的方式确定管片的盾尾间隙,录入至计算机内,在借助SLS-T管片安装软件,计算得出管片姿态。考虑到这种方式存在误差,且推进的时候管片承受巨大压力,或多或少会偏移,因此需由专员再次检测管片在稳定后的姿态,检测频率为直线每10环一次、曲线每5环一次,断面间隔最大的不超过2环。
管片姿态的检测方法颇为丰富,此处将1根5m精制铝合金尺(带水准气泡)置于管片环两侧,于横尺上确定与管片中心具有相对关系的点,测量坐标。负责人员应测得的坐标值、椭圆度、环两侧纵向超前量等指标告知负责环片安装的工作者,以便计算出最准确的矫正参数值。
8分中法测量技术
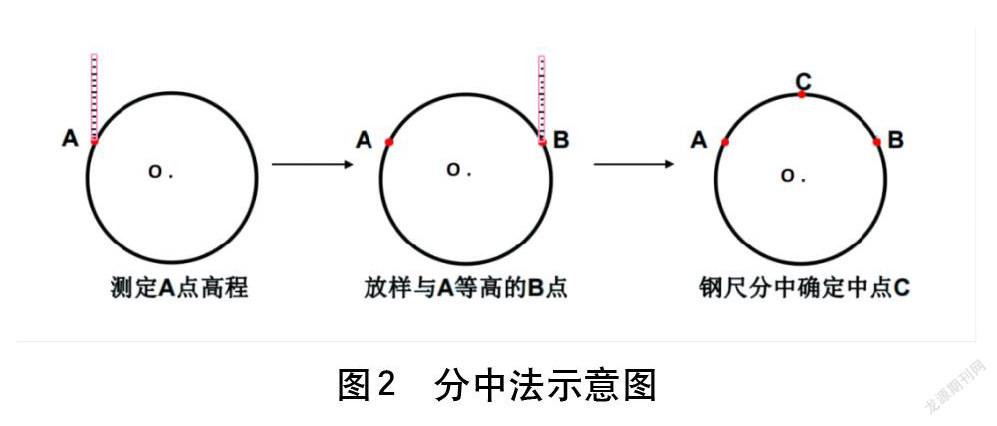
如图2所示,分别找到盾首和盾尾外壳的中点,然后反算盾首和盾尾的坐标。分中法测盾体的中心坐标作为多种测量方法中的一种,有着测量方便,操作简单等优点,因此在众多工地始发测量被采用,具体的测量步骤和方法如下。
图2中的圆相当于一个盾体,其中A、B、C点位测量点,O为盾体的中心坐标;根据工地始发条件的不同,有些工地的吊篮可能无法测到盾体上部的测量点,这就需要将站点移至中板进行测量。
(1)将装有棱镜杆的微型棱镜放置于A点处,测出A点的坐标记录并在盾体上做好标记。
(2)然后将棱镜移至右侧B点(目测跟A点对称位置)附近,通过测量观察测量的高程跟A点的高程做比较后,向右或左进行移动至高程跟A点高程完全一样时记录坐标并在盾体上做好标记。
(3)用皮尺或者钢卷尺沿着盾体从A点拉至B点,找出中点后在盾体上做好标记,将棱镜放置于此并测量此处的坐标,此点就是C点坐标,然后将此坐标减去盾体半径即得到O点坐标也就是盾体中心点坐标。
(4)将此数据输入到导向系统软件参数设置-激光靶零位数据的窗口,输入待求点坐标的前端和后端处。在与测量前端后端坐标的同一坐标系下,保证盾构机没有发生移动,使用全站仪瞄准激光靶(全站仪应处于测量通道处,保证与激光靶的入射角<5°),在导向系统软件参数设置-激光靶零位数据的界面中,点击测量,得到激光靶的坐标和角度。重复测量1次,若数据不变即为正确。点击保存,则零位数据初始化完成。
9结语
在整个地铁轨道建设过程中,地铁盾构区间的施工测量是极为重要的内容。项目单位只有严格按照标准开展联系测量工作、努力优化洞门预埋钢环检查测量、盾构机始发姿态定位测量及盾构机推进施工测量等施工技术,才能够从根本上提高施工质量。
参考文献
[1]陈冬.地铁盾构测量方法的应用研究刍议[J].工程建设与设计,2020(21):79-80,89.
[2]张林星.地铁区间隧道盾构法施工过程测量技术[J].工程机械与维修,2021(6):208-209.
[3]李昆阳.地铁盾构施工测量内容和方法概述[J].建筑技术开发,2020(3):81-82.
[4]张海龙.盾构隧道小曲线半径施工测量技术[J].石家庄铁道大学学报:自然科学版,2018,31(S2):39-41.
[5]陈通.乌市地铁施工现场小盾构的施工安全管理研究[D].南昌:华东交通大学,2019.
[6]陈光辉,曾永坚.长区间盾构法地铁隧道测量控制技术[J].四川建材,2020(11):88,91.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
学生天地(2020年3期)2020-08-25
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
水利科技与经济(2017年10期)2017-04-25
工程建设与设计(2016年4期)2016-02-27
少儿美术·书法版(2016年12期)2016-02-06
河南科技(2014年16期)2014-02-27