四角粽柔性夹持结构设计与抓取试验研究
2022-07-21 12:32:20刘新宇张博文崔政伟
包装与食品机械 2022年3期
马 威,刘新宇,金 炜,张博文,崔政伟,2
(1.江南大学 机械工程学院,江苏无锡 214122;2.江苏省食品先进制造装备技术重点实验室,江苏无锡 214122)
关键字:粽子抓取;增强指尖型夹爪;有限元仿真;夹持性能
0 引言
粽子是我国端午节庆食品,由粽叶包裹糯米及某些馅料蒸制而成,作为一种传统性、时令性方便食品,得到越来越多人的喜爱。粽子的需求量日益增大,传统的生产方式难以适应当前的产业需求[1]。目前,粽子批量化生产主要采用人工分拣包装,自动化程度低,需要耗费大量的劳动力成本。随着机器视觉、运动控制等技术的逐渐成熟,使用机械手分拣、包装粽子,实现连续化生产具有重要的研究和应用价值。
机械臂末端执行器可分为刚性夹持与柔性夹持[2]。近年来,柔性夹持成为机械手研究方向热点,并逐渐应用于各个领域,尤其在食品包装行业[3]。柔性夹持主要由柔性手指组成,手指由柔性材料(如硅橡胶)制成,并且以气压驱动达到柔性抓取效果。较刚性机械手而言,柔性夹持结构简单、灵活性高、安全性好,尤其不会对夹持对象产生损伤[4]。目前,国内外学者对柔性夹持技术进行了大量研究,BROWN 等[5]提出了一种充满颗粒的无孔弹性袋型末端夹持器,具有良好的适应性;PANAGIOTIS 等[6]设计了一种便携式、辅助性柔性手套,可以对手指进行康复治疗以及功能性抓取;KEVIN 等[7]利用纤维增强型软机器人来精细地操纵和采样深礁上的易碎物种;PRETER等[8]设计了一款含有柔性夹持装置的草莓采摘机器人;冯乃诗等[9]提出纤维增强式三腔体仿人软体机械手和新型布管方式,增加了整体的稳定性、美观性;卢伟等[10]通过柔性夹爪对褐菇进行无损采摘;皮杰等[11]针对水果表皮脆弱易损,设计了一种柔性三指夹持装置。
然而粽子的柔性抓取研究较少,现有的柔性夹持装置难以适应粽子。本文以四角粽为抓取对象,根据其几何特征设计一种增强指尖型三指柔性夹爪。基于3D 打印模具,以液态硅胶为材料浇铸成形制备柔性手指;测定硅胶材料二阶Yeoh模型材料常数,建立手指仿真分析模型并进行相关试验验证;最后进行粽子抓取试验,测试柔性夹爪对粽子的夹持性能。
1 柔性夹爪三指结构设计
1.1 四角粽简化模型
各个地区习俗的不同,粽子的形状各有差异,如三角粽、枕形粽、牛角粽、塔形粽,而最常见的是四角粽[12],其几何特征类似三棱锥。粽子棱边有圆弧过渡,整体较软,容易造成夹持损伤。四角粽重量一般在75~300 g,品种较多。本文以100 g标准四角粽为抓取对象,其三维简化模型如图1所示。由于四角粽棱边长短不一,经测量多个粽子,其尺寸参数范围如表1所示。
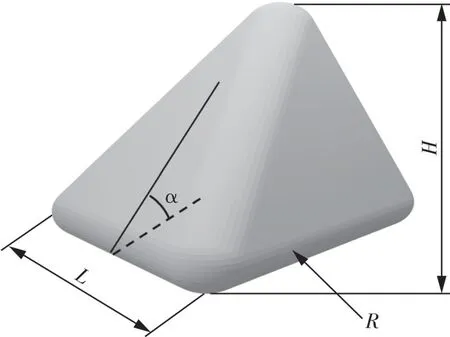
图1 粽子简化三维模型Fig.1 Simplified 3D model of rice dumplings

表1 粽子尺寸参数Tab.1 Size parameters of rice dumplings
1.2 抓取方式分析
多腔体型柔性手指采用超弹性材料制成[13],其变形原理如图2所示。手指总体由形变上层和限制底层组成,其中形变上层是一段连续的多个腔体,限制底层采用同种材料并在中间嵌入纤维限制层,二者形成连续的密闭腔体。当向密闭腔体中充入一定气压时,形变上层各腔体膨胀变形向轴向延伸,而限制底层由于纤维层的作用限制其延伸变形,迫使手指向下弯曲变形。

图2 多腔体柔性手指结构Fig.2 Multi-cavity flexible finger structure
柔性夹爪在实现抓取对象时有2 种方式[14]:一种是包络性抓取,另一种是指尖性抓取。由于手指弯曲变形呈圆弧型[15],变形能力较大,所以通常采用包络性抓取方式对一些圆形对象(如苹果、橘子、饮料瓶等)实现抓取任务,具有良好的自适应贴合能力,抓取效果显著。然而粽子的形状不规则且棱角较多,采用包络性抓取难以实现粽子的整体包裹。经抓取试验验证,该抓取方式不可行。
指尖抓取主要通过指尖对物体表面施加压力,依靠其产生的摩擦力实现抓取操作。指尖抓取粽子难点在于手指接触粽子面积较少,导致指尖接触性能较差;并且随着手指弯曲扰度的增加,其指尖接触性能也会越来越差,影响柔性夹爪整体夹持性能。因此,需要针对手指进行结构改进和优化。
1.3 手指结构设计
柔性手指结构如图3所示。采用3 指节手指(不包括固定指节)制作柔性夹爪,以较短的手指长度降低手指弯曲扰度的影响,并通过柔性手指与刚性结构连接提高手指刚度,增强夹爪夹持能力。同时为提高手指指尖接触性能,对手指限制底层提出一种增强指尖结构。其设计优点:抓取时,增强指尖结构可以触及粽子底部缝隙,加大指尖与粽子底部接触面积,从而增强夹爪夹持能力;由于增强指尖结构为超弹性材料,具有弹性变形能力,所以随着手指弯曲扰度的增加,该结构可以与粽子底部自适应贴合,提高夹爪贴合效果与抓取稳定性。手指尺寸参数见表2。

图3 柔性手指结构Fig 3 Flexible finger structure

表2 柔性手指尺寸参数Tab.2 Size parameters of flexible finger
1.4 三指夹爪结构设计
三指夹爪主要由爪套和爪架构成,其具体结构如图4所示。爪套由爪套1 和爪套2 两个组件嵌套而成,将手指固定指节内嵌于爪套中,通过尼龙螺栓连接,用于固定手指和连接爪架。其中爪套2 作为刚性连接件可以增强手指刚度并为夹爪提供高度性要求。爪架作为夹爪基体,整体呈三棱锥台特征以适应四角粽,三指呈120°分布,斜面坡度为75°;并在其斜面开设矩形凹槽与爪套2 内嵌连接,各槽内开有定位孔(孔间距为14.5 mm,高度为8 mm),通过螺钉连接固定手指。爪架顶部设有螺纹孔,可通过法兰与机械臂连接工作。考虑到制作成本和效率,三指组件均采用3D打印制作。
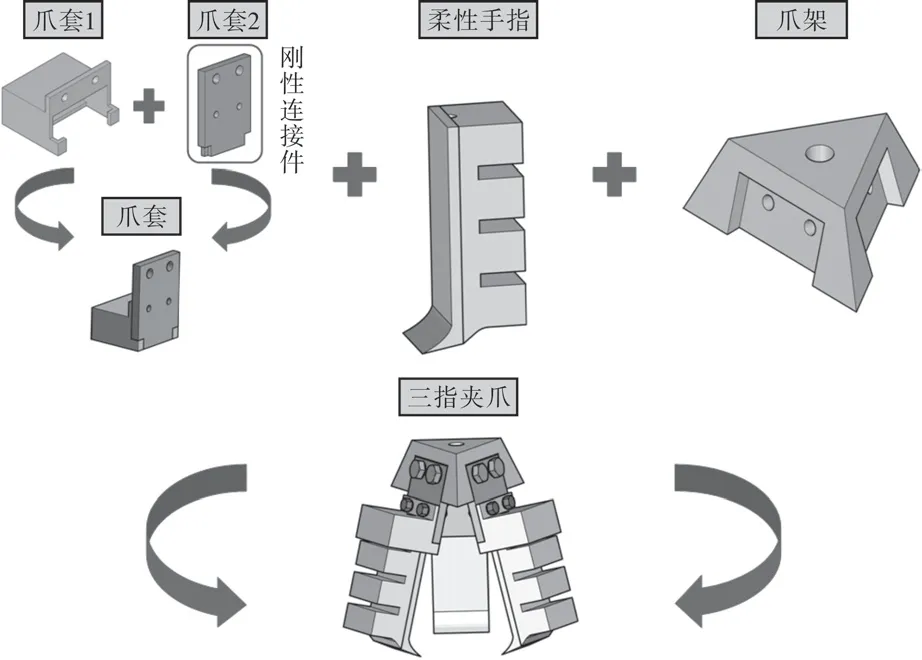
图4 柔性三指夹持装置Fig 4 Flexible three-finger clamping device
2 柔性手指制备
2.1 材料选择
由于手指材料对手指弯曲特性和夹持性能的影响较为显著,所以综合考虑其拉伸强度、伸长率和成本等方面,选择三景信德科技有限公司SJ3113型硅胶材料。该材料在室温下即可固化成型,并且具有良好的抗拉性能,材料参数如表3所示。

表3 SJ3113 型硅胶材料参数Tab.3 Parameters of SJ3113 type silica gel material
2.2 柔性手指制作
采用浇铸成型方法制作柔性手指,如图5所示。以光敏树脂为原材料,通过3D打印制作模具,模具可分为指模和底模。由于硅胶固化后容易产生粘模现象造成脱模困难,所以采用一种装配式模具方法来提高手指脱模效率。将指模分解成3部分,即指模1、指模2、指模3;底模分解为底模1和底模2。各部分均采用3D 打印制作并通过尼龙螺栓连接。

图5 柔性手指制备流程Fig 5 Fabrication process of flexible fingers
3 有限元仿真与验证
3.1 硅胶材料本构模型
硅胶属于超弹性非线性材料,一般根据应力应变关系采用应变能密度函数W 研究其非线性力学特性[16],并建立硅胶本构方程:
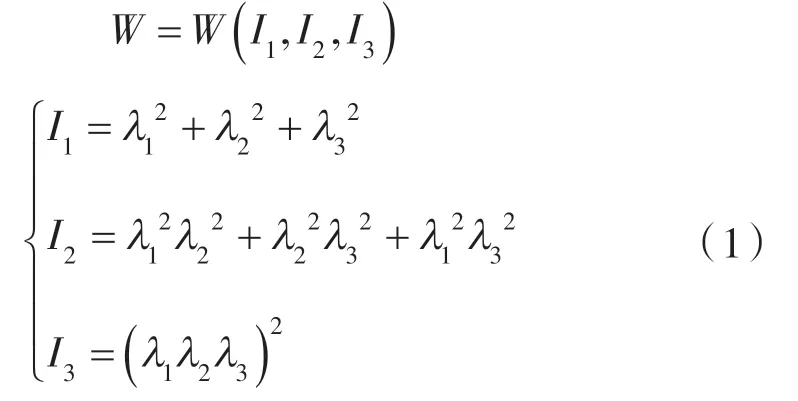
式中 I1,I2,I3——变形张量不变量;
λ1,λ2,λ3——3 个方向的伸长比。
水质清瘦,藻类不丰富时,严禁使用外用杀虫药,特殊情况可低浓度局部使用阿维菌素、伊维菌素类,水质过肥时可适当增加用量。使用外用杀虫药时,为增加疗效,可配合使用硫酸亚铁(乌鳢养殖池塘除外)。不良水质如:黑水、红水、浊水及寡水禁止使用外用杀虫药。
根据唯象理论(材料各向同性且不可压缩)有:(λ1λ2λ3)=1,即I3=(λ1λ2λ3)2=1。
由于设计的柔性手指需要具备一定的变形能力,所以结合文献[17]在材料本构模型上选择二阶的Yeoh 模型:

式中 C10,C20——硅胶材料Yeoh 模型材料系数。
3.2 二阶Yeoh 模型材料系数测定
对于Yeoh 模型材料系数C10,C20的测定,一般采用单轴拉伸试验来获取[18]。使用QJ211S-5 kN 型微机控制电子万能试验机进行拉伸试验,并制作SJ3113 型硅胶哑铃状试件。根据文献[16],基于二阶Yeoh 模型有:

式中 t1——主应力。
根据单轴拉伸测得不同拉伸比(λ1)下的主应力(t1),以 (λ12+ 2/λ1) 为横坐标,以为纵坐标,将试验数据线性回归拟合成直线如图6所示,其中:

图6 二阶Yeoh 模型常数拟合曲线图Fig.6 Constant fitting curve of second-order Yeoh model

计算得:C10=0.09,C20=0.001 6。
3.3 Workbench 仿真与验证
由于指尖增强结构对手指在无负载作用下弯曲变形影响较小,所以去除该结构以简化模型提高计算效率。设置二阶Yeoh 模型材料系数C10,C20,并在手指固定指节施加固定端约束,手指内部气压通过在手指内部表面施加压力载荷等效代替。图7为50 kPa 压力下手指变形云图,可以看出手指具备较大的变形能力。

图7 50 kPa 气压下手指弯曲变形Fig.7 Finger bending deformation under 50 kPa air pressure
为分析手指弯曲变形特性并验证仿真结果的正确性,对手指内部分别施加20,40,60,80 kPa压力,得到模拟弯曲变形曲线;同时进行单指试验,测得同等压力下手指实际弯曲变形曲线。将模拟结果与试验结果进行对比。结果显示:随着气压的上升,手指弯曲变形更剧烈,手指弯曲基本呈常曲率圆弧特征并且具有良好的弯曲性能;仿真结果与试验结果总体变形趋势一致,其中试验结果变形大于仿真结果,但整体误差较小,在正常范围内。因此,建立的有限元模型能有效预测手指实际弯曲变形特性。
4 粽子抓取试验
4.1 单指指尖压力测试
为测试手指指尖压力特性,设计手指压力测试平台如图8所示。由于手指增强指尖结构对指尖压力影响较小,所以制作无增强指尖结构手指进行测试。分别向手指内部输入10~100 kPa气体,间隔10 kPa,每组测10 次,记录每组推拉力计压力峰值并取平均值。

图8 手指指尖压力测试装置Fig.8 Schematic diagram of fingertip pressure test device
试验结果如图9所示。结果显示:手指指尖压力随气压变化基本呈线性增长趋势,气压在100 kPa 时手指指尖压力达到2.82 N。由此可知,设计的柔性手指具有良好的指尖力学性能,并且具备一定的抓取能力。

图9 输入气压与指尖压力关系Fig.9 Relationship between input air pressure and fingertip pressure
4.2 粽子抓取成功率测试
抓取成功率是柔性夹爪夹持性能重要指标。为测试夹爪抓取粽子的效果,研究不同气压下柔性夹爪抓取粽子的成功率,分别对增强指尖型夹爪和无增强指尖型夹爪展开粽子抓取成功率测试试验。将粽子放置于抓取平台上,移动夹爪至指定位置进行抓取,粽子无掉落现象记为抓取成功。其中,测试气压范围为10~100 kPa,间隔10 kPa,每组气压测50 次,测试结果如图10 所示。

图10 柔性夹爪抓取成功率对比Fig.10 Comparison of the success rate of flexible grippers
抓取结果显示:随着气压的上升,柔性夹爪抓取成功率逐渐提高;增强指尖型夹爪较无增强指尖夹爪具有更高的抓取成功率,抓取成功率整体提高了20.75%;并且增强指尖型夹爪气压在60 kPa 以后抓取成功率能稳定保持在94%以上,抓取效果显著。由此证明,设计的增强指尖结构是保证柔性夹爪高效抓取粽子的关键性结构,具有优异的抓取性能。
4.3 粽子夹持力测试
为测试夹爪对粽子夹持能力,设计粽子夹持力测试平台,如图11 所示。粽子底部通过细绳与推拉力计相连,推拉力计垂直固定。为便于操作,将三指夹爪安装在可上下移动的试验架上以代替机械臂工作。粽子抓取后缓慢均匀地垂直向上移动夹爪,直至粽子被拉出脱落后停止,记录推拉力计拉力峰值。测试气压范围在10~100 kPa 之间,间隔10 kPa,每组气压测10 次,并取拉力峰值平均值。由于气压在0~30 kPa 之间夹爪基本无抓取能力,所以夹持力可设为零。
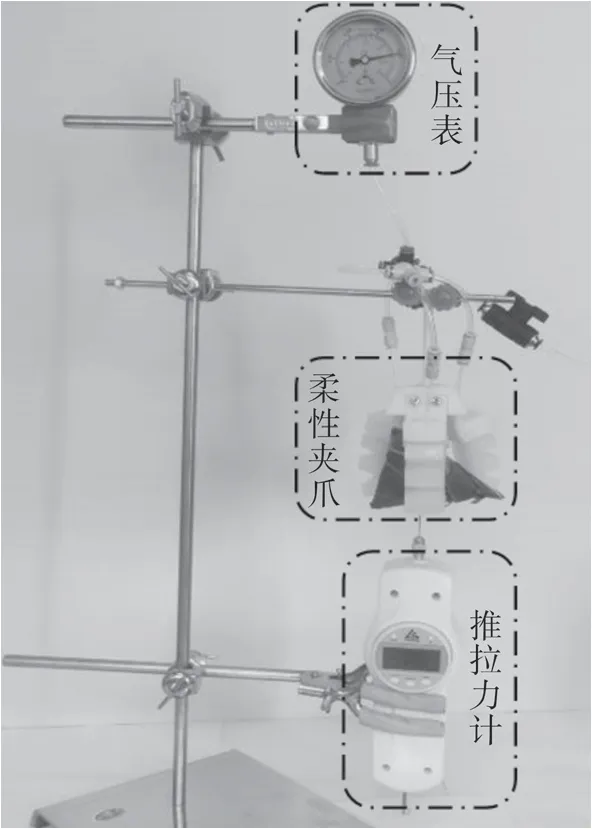
图11 夹持力实验装置图Fig.11 Schematic diagram of experimental device for clamping force test
结果显示:气压在30~100 kPa 范围内时,夹持力基本呈线性增长趋势变化;气压在100 kPa时夹持力达到6.2 N,并且粽子未产生夹持损伤。因此,柔性夹爪对粽子具有较强的夹持能力,同时能保证粽子无损抓取。经综合考虑柔性夹爪夹持能力以及抓取成功率,避免其内部气压过盈,最终确定柔性夹爪夹持性能最佳的气压范围为60~80 kPa,此时夹持力范围为2.1~3.9 N。
5 结语
(1)根据四角粽子三维几何特征以及指尖抓取方式,设计一种柔性三指夹持装置。其中包括增强指尖型柔性手指、三指爪架及其固定连接装置、装配式模具的设计,并采用3D 打印、浇铸成形等方法制作柔性夹爪。
(2)以SJ3113 型硅胶作为柔性手指材料,测定基于二阶Yeoh 模型材料系数C10,C20,通过ANSYS 软件对手指弯曲变形进行仿真预测并单指试验验证,试验与仿真结果基本一致。
(3)对柔性夹爪进行粽子抓取与夹持力测试试验,结果表明:柔性夹爪对粽子具有较高的抓取成功率且具备一定的夹持能力,气压在60~80 kPa范围内夹持性能达到最佳。
本文设计的柔性夹爪结构简单,制作成本低廉,抓取成功率高,可为机械手自动化分拣、包装粽子等生产环节提供新思路与新方法,对于提高生产效率以及降低劳动力成本具有重要研究意义。
猜你喜欢
大灰狼画报(2022年6期)2022-08-06 07:39:36
当代陕西(2022年6期)2022-04-19 12:12:26
学生天地(2020年22期)2020-06-09 03:07:46
现代苏州(2019年16期)2019-09-27 09:30:38
中国(俄文)(2019年6期)2019-07-05 07:02:58
娃娃画报(2018年6期)2018-08-15 13:03:20
Coco薇(2017年9期)2017-09-07 20:50:46
中成药(2017年4期)2017-05-17 06:09:46
核科学与工程(2015年3期)2015-09-26 11:58:24
故事作文·高年级(2015年6期)2015-09-08 08:38:26