集合调整卡尔曼滤波方法在M2 分潮数值模拟中的水深估计研究
2022-07-20 05:34武浩文赵艳玲韩桂军李威曹力戈武晓博李超亮李云东周功赋
海洋学报 2022年6期
武浩文,赵艳玲,韩桂军*,李威*,曹力戈,武晓博,李超亮,李云东,周功赋
(1.天津大学 海洋科学与技术学院,天津 300072;2.中国人民解放军31010 部队,北京 100081)
1 引言
随着计算机技术的不断发展,海洋数值模型越来越成为人们研究和预测海洋的重要工具。对于所有的海洋数值模式而言,参数化方案以及精确的参数值的给定对数值模拟结果有着重要的影响。在海洋数值模式调试的过程中,参数值的给定通常采用试错的方法,以使模拟结果接近观测。由于海洋数值模型的复杂性,这是一个极其耗费计算资源与人力资源的过程。因此,替代这种主观调试方法的途径之一是采用海洋数据同化技术,通过将观测数据同化到海洋数值模型中,在模型状态场调整的同时,对参数进行估计,从而得到一个合理的参数值。这样做的同时,也可以在一定程度上得以缓解试错法在海洋数值模型调试中所带来的繁重任务。利用基于伴随模型的四维变分同化方法与集合卡尔曼滤波方法均可以开展海洋数值模型中参数的最优估计。
以潮汐潮流的数值模拟为例,模型中不确定的参数包括水深、低摩擦系数和开边界条件等。此前,研究者们大多采用伴随方法来进行潮汐潮流模拟中这些参数的优化,从早期基于线性浅水方程模型的理想数据同化试验[1-4],到后来基于非线性二维和三维潮波数值模型的实际数据同化试验[5-12],均取得了很好的研究成果。相比较而言,基于集合卡尔曼滤波方法开展潮汐潮流模拟中的参数估计研究尚较少。Ngodock等[13]利用状态增广集合卡尔曼滤波(Augmented State Ensemble Kalman Filter,ASEnKF)对一个全球三维海洋环流模型的潮汐外强迫进行修正。Wilson 和Özkan-Haller[14]、Wilson 等[15-16]、Landon 等[17]和Moghimi等[18]利用基于集合的数据同化方法对近岸、河流和潮汐汊道的水深参数进行最优估计。类似本文所开展的基于集合卡尔曼滤波方法对渤海和黄海这样的陆架浅海M2分潮数值模拟中的水深参数进行估计研究尚鲜有报道。
本文所关注的渤海和黄海,由于其独特的地理位置和海底地形,使其潮波运动独具特征。前人的研究表明,黄海的潮能消耗约占本海区总能量的80%以上[19-20],潮汐、潮流成为本海区海水运动最重要的过程。因此,在上述海域建立高精度的潮汐潮流模拟数值模型有着重要意义。本研究拟采用集合卡尔曼滤波方法,以集中反映该海域潮波运动特征的优势分潮—M2分潮为例,对数值模型构建过程中所涉及的不确定参数—水深进行最优估计,以期获得更好的M2分潮模拟结果。
2 数据和方法
2.1 数据
本研究的海区范围为35°~41°N,117°~127°E,包括渤海和黄海的大部分海域(图1)。数值模型所使用的水深数据来自美国国家地球物理数据中心(U.S.National Geophysical Data Center,NGDC)的ETOPO2(https://www.ngdc.noaa.gov/mgg/global/etopo2.html),其分辨率为(1/30)°×(1/30)°。研究海区内M2分潮网格化的潮汐调和常数来自日本国家天文台的NAO.99Jb数据[21](https://www.miz.nao.ac.jp/staffs/nao99/index_En.html),其分辨率为(1/12)°×(1/12)°;南部开边界处M2分潮的潮流调和常数来自美国俄勒冈州立大学的TPXO9 数 据[22](https://tpxows.azurewebsites.net/),其 分辨率为(1/12)°×(1/12)°。由于NAO.99Jb 数据在中国沿岸海域有较高的精度[23],因此本研究将其作为数据同化试验中的观测数据来使用。此外,本研究还使用了研究海域内34 个验潮站的M2分潮调和常数[6],其位置和编号如图1 所示。

图1 研究海域范围及各验潮站位置和编号Fig.1 Study area and locations of tide gauges with numbers assigned
2.2 海洋数值模式
本研究用于关注海域潮汐潮流模拟的数值模型为广义坐标系统的美国普林斯顿大学海洋模式(Princeton Ocean Model with Generalized Coordinate System,POMgcs)[24]的外模式,其动力学基本方程组为

式中,t为时间;x和y为水平方向的笛卡儿坐标;U和V为水平方向的流速;D=H+ζ,其中ζ为水位,H为水深;f为科里奥利参数;g为重力加速度;ρa和 ρw为空气和水的密度;Cd为风应力拖曳系数;Wx和Wy为水平方向的风速;Cb为 底摩擦系数;AM为水平涡动系数。
在本研究中,数值模型的空间网格分辨率为(1/30)°,时间步长为12 min,初始条件取为0 值。底摩擦系数在整个海区取为常数1.0×10-3。研究海域南部开边界处的水位和流速按下式给定:

式中,Y为水位或流速;A为振幅;ω为频率;φ为迟角;V和u为天文初相角。
2.3 集合卡尔曼滤波方法
本研究所采用的集合卡尔曼滤波方法是由Anderson[25]提出的确定性方法,即基于最小二乘框架的集合调整卡尔曼滤波(Ensemble Adjustment Kalman Filter,EAKF)。对某一观测yo而言,该方法的实施包括如下两个步骤:
第1 步,计算观测增量:


式中,a为经验给定的局地化半径,b为观测点与状态变量格点之间的距离。
在数据同化过程中,由于分析集合的不确定性(标准差或集合离散度)总是小于先验集合的不确定性,随着同化的持续进行,分析集合的离散度逐渐减小。但由于不可避免的模式偏差的存在,使得所刻画的先验场的不确定性小于实际,高估了模式的准确性,从而导致同化作用偏弱,甚至引起滤波发散。因此,对于状态估计,本研究引入静态乘法膨胀方案,即确定一个常数膨胀因子,对各个集合成员相对于集合平均的扰动进行膨胀,用以调整集合的离散度,从而避免集合离散度降低,导致滤波发散。而对于参数估计,则引入条件静态膨胀方案[27-28],即通过判断当前时刻集合方差的大小,决定是否对其进行参数膨胀。参数的条件静态乘法膨胀公式如下:

此外,为了进一步提高EAKF 参数估计的效果,在后续实际数据试验中采用了强化的参数校正数据同化方法(Data Assimilation Scheme for Enhancive Parameter Correction,DAEPC)[29]。该方法的实现方式是在模型状态场的估计达到准平衡态后,再启动对模型参数的估计。这是因为在数据同化的初期,观测与状态变量之间的协方差由状态误差主导;在进行一段时间的模型状态估计后,状态误差降低,参数误差则成为模式误差的主要成因,即观测与状态变量之间的协方差反映的主要是由参数主导的信号,因此,采用DAEPC 方法有助于强化参数调整过程中的信噪比,从而提高参数估计的效果。
3 数据同化方案设计
3.1 敏感性分析
Han 等[8]研究表明,相较于底摩擦系数和开边界条件,水深对潮汐潮流模拟结果有着较大的影响。在本研究进行水深参数估计前,首先开展水深参数的敏感性分析试验。按照Han 等[8]的方法,将本文研究海域按照水深进行划分。经大量测试,将区域按照水深划分为0~20 m、20~40 m、40~60 m 和60 m 以上4 个区域(如图1 中的黑色等深线所示)。根据水深数据的精度,本研究在上述4 个区域内原水深数据的基础上,分别叠加0.5 m、2 m、4 m 和6 m,生成相应的有偏水深数据,并保持模式其他参数不变,进行约10 d(以M2分潮周期12.42 h 计算,共计20 个周期)自由积分。在模式积分的最后一个M2分潮周期(后文简称周期)内,将水位计算结果与原模式结果进行对比,计算各网格点水位的时间平均均方根误差(Root Mean Square Error,RMSE),结果如图2 所示。由图可以看出,大部分区域的水位误差在0.1 m 以上,且靠近陆地的海域,水位误差更大,尤其在黄海的北部和东部,最大水位误差达到了0.6 m。这一水深参数的敏感性分析试验结果表明,在本研究所采用的水深参数区域划分方案下,M2分潮的模拟结果能够产生明显的差异,为开展后续的数据同化试验奠定了基础。

图2 基于有偏水深数据获得的水位数值模拟结果的时间平均均方根误差Fig.2 Time mean root mean square error of water level simulated with biased water depths
3.2 数据同化试验
本研究拟同时开展理想和实际水深参数估计试验。其中理想数据同化试验又称为孪生试验。在这两种数据同化试验中,均将水深增量作为待估计的参数,后文统一简称为水深参数。待估计的水深参数的设置采用与敏感性分析试验相同的分区方案,即划分为0~20 m、20~40 m、40~60 m和60 m 这4 个区域,从而有4 个与其相对应的水深参数待估计。以某一个模式网格点 (i,j)为例,估计后的水深按下式计算:

在后续的理想和实际数据同化试验中,集合数均设定为30,每个时间步均进行同化,同化时长设定为3 个周期。对于状态估计,由于POMgcs 模式采用蛙跳格式的时间差分方案,因此在同化试验中,当前的观测同时用于调整当前和上一个时间步的水位和潮流状态变量[30]。同化后,利用更新后的水深继续积分约3 d 以达到稳定。利用最后一个周期的水位数据进行调和分析。需要注意的是,同化过程中,调整后的水深有可能会使得D<0。为此,在同化过程中为水深的调整设定一个阈值,以保证这种情况不会发生。
3.2.1 理想数据同化试验
在理想数据同化试验中,将ETOPO2 的水深数据视为真实水深,利用该水深自由积分得到的水位数据作为真实场。在此基础上,将真实场叠加上标准差为0.1 m 的高斯白噪声生成与模式网格点和时间积分步一致的水位观测场。
水深参数集合的形成与敏感性分析试验相同,即在0~20 m、20~40 m、40~60 m 和60 m 这4 个区域内,分别以0.5 m、2 m、4 m 和6 m 为先验水深参数(m=1,2,3,4),将其叠加高斯白噪声形成相应的先验水深参数集合,标准差分别取为各先验水深参数值的5%。
数值模型基于上述有偏的水深参数集合积分约7 d以达到稳定。需要说明的是,在测试中发现:同时进行状态和水深参数估计已经能够获得很好的试验结果,因此在理想数据同化试验中并未采用DAEPC方法。
3.2.2 实际数据同化试验
在实际数据同化试验中,利用NAO.99Jb 的调和常数计算出模式积分的所有时间步、每隔3 个模式水平网格点的水位值,连同验潮站处所计算得到的水位值一并作为本研究的观测数据。令4 个先验水深参=0(m=1,2,3,4),然后采用叠加高数均为0,即斯白噪声的方式各自形成先验水深参数集合,其标准差与理想试验相同。模型积分约7 d 达到稳定。之后引入DAEPC 方法进行水深参数估计。在测试中发现,进行模型状态场估计的1 个周期后,状态场估计的误差已达到准平衡态。因此,进行实际数据同化试验时,在第1 个周期仅进行状态场估计,之后同时进行状态场和水深参数估计。在实际数据同化试验中,进行如下两组试验:(1)仅利用来自NAO.99Jb 的观测数据,设置观测误差为0.2 m。(2)同时利用来自NAO.99Jb和验潮站的观测数据,设置NAO.99Jb 数据的观测误差为0.2 m,验潮站数据的观测误差为0.1 m。这两组试验中所给定的观测误差是通过多次数据同化试验后获得的最优结果。
4 结果
4.1 理想数据同化试验
本节主要讨论当数值模式的误差仅来自水深参数时,EAKF 方法的参数估计效果。通过多组试验结果对比,发现局地化半径为40 个网格点,不进行状态场膨胀,而参数膨胀系数为1.3 时,水深参数估计的效果最好。因此,这里基于该组试验结果,分析EAKF方法对前述4 个参数的估计效果。
图3a 和图3b 分别为同化后空间平均的水位RMSE 时间序列和4 个水深参数估计值与真值偏差的时间序列。为方便进行比较,将图3b 中水深参数估计偏差进行标准化处理后形成图3c,即将4 个水深参数估计偏差的时间序列分别除以初始时刻设置的水深参数值(0.5 m、2 m、4 m 和6 m)。
由图3a 和图3b 可见,在数据同化试验的初期,模式水位误差由浅水区域主导,因此很快达到稳定。与此同时,EAKF 的状态估计很快将水位误差调整到观测误差(0.1 m)以下。一段时间后,状态误差已经很低,此时模式误差主要来自。在同化3 个周期后,两个参数在真实值附近稳定,水位误差也进一步降低。而虽然很快达到稳定,但稳定后呈周期性震荡,与真实值始终维持一定的距离。同化结束后,水位误差保持在0.01 m 以下,说明模式状态场误差已经大幅降低,且同化后模式的自由积分(3个周期后)结果与真实场也十分接近(图形未在此给出)。
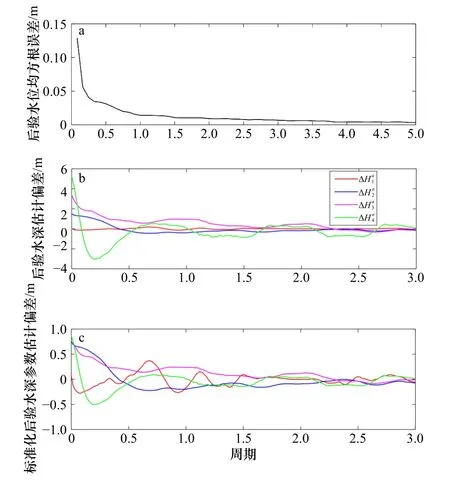
图3 后验水位均方根误差(a)、后验水深参数估计偏差(b)时间序列和标准化的后验水深参数估计偏差时间序列(c)Fig.3 Time series of the root mean square error for the posterior water level (a),bias (b) and standardized bias (c) for the posterior water depth parameters
由标准化后的水深参数偏差(图3c)可见,在参数估计的起始阶段,很快回到了真实值附近,说明有很高的敏感性。在参数估计的第1 和第2 个周期,产生了较明显的震荡,这是由于和仍未稳定,在参数估计的过程中不断被调整。而到了第3 个周期,基本稳定后,也保持在真值附近。在整个参数估计过程中趋势比较平稳,偏差减小的速度较慢,说明这两处位置的敏感性相对较低,需要较长时间的参数估计才能达到稳定。而在稳定后一直与真值保持着一定的偏差,说明并不敏感,即使没有回到真值,也不能产生很大的状态误差。
图4 为基于真实场和理想数据同化试验前后数据绘制的M2分潮同潮图。其中,迟角以格林威治时间(对应迟角为0°)为基准绘制。由图4b 可见,同化前,海区边缘处的振幅和无潮点附近的迟角均出现一定误差,且渤海北部的无潮点位置相较于真实场(图4a)出现偏移。同化后,振幅和迟角(图4c)相比于真实场均已无明显差异,渤海北部无潮点的位置也得到改善。

图4 利用真实场数据(a)、理想试验中的先验结果(b)和后验结果(c)绘制的M2 分潮同潮图Fig.4 Cotidal chart of M2 constituent from the truth (a),prior (b) and posterior (c)
表1 给出了先验和后验振幅与迟角的空间平均误差。同化前,振幅的误差约为7.6 cm,迟角误差约为12°54′;同化后,振幅误差仅为0.2 cm,迟角误差仅为18′。表明同化后,模式误差整体上得以大幅降低。
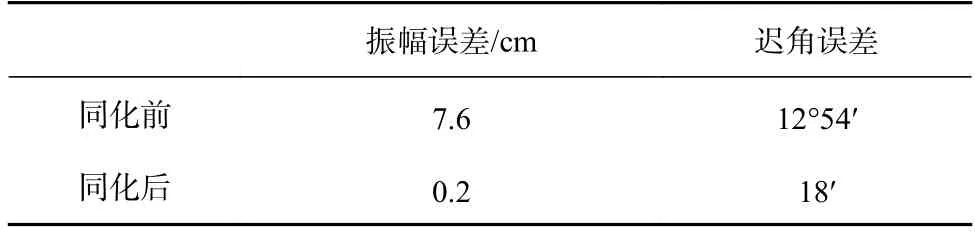
表1 理想数据同化试验中M2 分潮的先验和后验振幅与迟角空间平均误差Table 1 Spatial averaged errors of amplitude and phase lag of M2 constituent from the prior and posterior in twin experiment
综上所述,在理想数据同化试验中,EAKF 方法通过对水深参数进行最优估计,有效地降低了模式的偏差。这一结果也表明EAKF 方法可以很好地应用于潮汐潮流数值模拟的水深参数估计中。
4.2 实际数据同化试验
4.2.1 基于NAO.99Jb 数据的水深估计
在本试验中,将NAO.99Jb 数据作为观测进行水深估计。经过多组试验,选取局地化半径为15 个网格点、状态膨胀系数为1.03、参数膨胀系数为1.10 的数据同化试验结果在此讨论。
图5 为后验水位均方根误差(将数据同化试验得到的水位与NAO.99Jb 数据对比)的时间序列分布图。由图可见,在同化开始后,后验水位均方根误差在周期性震荡的过程中下降。这是由于模式计算结果与NAO.99Jb 数据之间存在较大的相位误差,导致两者水位变化方向有时不同,从而使得在这段时间内,模式模拟的水位均方根误差不断增大。但总体上来看,水位均方根误差保持在观测误差(0.2 m)附近波动。而模式状态的调整无法改正这一相位误差。第1 个周期后,开始同时进行状态和参数估计,这时由于水深参数的调整,使得水位模拟均方根误差不断减小,最后维持在0.1 m 附近,且小于所给定的NAO.99Jb 数据的观测误差(0.2 m),说明数据同化试验是成功的。

图5 后验水位均方根误差的时间序列Fig.5 Time series of the root mean square error for the posterior water level
图6 为基于NAO.99Jb 和实际数据同化试验前后数据绘制的M2分潮同潮图。由图6c 可见,整体上,同化后模式的调和分析结果更接近NAO.99Jb 数据,尤其是在黄海的东北和东南部,同化后振幅明显减小,迟角的分布也更趋近NAO.99Jb。同时,各无潮点的位置也有一定改善:渤海北部的无潮点向左偏移,渤海南部、黄海中部的无潮点则向下移动。对比图6a、图6b 和图6c 可见,江华湾部分误差在同化后误差较大。导致这一现象的原因可能是由于本研究中估计的水深参数个数较少,使得在当前这样的参数估计方案下,估计后的水深参数虽然使得总体的误差在减小,但这种减小的方式有可能是以某些区域的模拟误差减小、某些区域的模拟误差增大的方式而获得,而不是以整个研究区域的模拟误差同时减小的方式获得。因此,设计更好的水深参数估计方案是后续需要进一步开展的研究工作。

图6 利用NAO.99Jb 数据(a)和NAO.99Jb 实际数据同化试验中的先验(b)和后验(c)结果绘制的M2 分潮同潮图Fig.6 Cotidal chart of M2 constituent from the NAO.99Jb (a),prior (b) and posterior (c)
表2 给出了实际数据同化试验中M2分潮的调和常数在同化前后与NAO.99Jb 相比的空间平均误差。从整体上来看,无论是振幅还是迟角,后验结果都优于先验结果。

表2 NAO.99Jb 实际数据同化试验中M2 分潮的先验和后验振幅与迟角空间平均误差Table 2 Spatial averaged errors of amplitude and phase lag of M2 constituent for the prior and posterior in the NAO.99Jb data assimilation experiment
4.2.2 基于NAO.99Jb 和验潮站数据的水深估计
在4.2.1 节的实际数据同化试验基础上,加入验潮站数据进行水深估计。在大量同化试验方案测试的基础上得到如下两组较优的数据同化试验:试验1 为使用全部NAO.99Jb 和验潮站数据,开展水深估计试验;试验2 为模式网格点先验水深小于20 m 且非渤海区域内仅使用验潮站数据,其余部分则使用全部数据,开展水深参数估计试验。
在上述同化试验中,将验潮站数据的观测误差设置为0.1 m,NAO.99Jb 数据的观测误差设置为0.2 m。其余试验设置与4.2.1 节相同。基于试验1 和试验2 的结果,将4.2.1 节的NAO.99Jb 数据同化试验作为对比试验,进行结果讨论分析。
表3 给出了同化前、试验1、试验2 和对比试验与验潮站振幅,迟角的空间平均误差。由表3 可以看出,各试验的整体误差相较于同化前均有所降低。其中,试验2 的误差最小,相比于同化前,振幅误差减小了40.27%,迟角误差降低了49.19%;而试验1 的振幅和迟角误差只分别降低了28.52%和29.39%。
图7 给出了试验1、试验2 和对比试验所得到的M2分潮同潮图以及在验潮站位置处同化前后振幅和迟角误差的变化情况。图8 为先验、试验1、试验2 和对比试验在各验潮站位置处的调和常数误差统计直方图。由图7 和图8 可见,相较于同化前,试验1中验潮站位置处的振幅和迟角误差减小的站点数分别为21 个和26 个,试验2 中分别为25 个和30 个。这表明虽然试验2 相较于试验1 所使用的观测信息更少,但验潮站位置处振幅和迟角的整体误差以及误差分布都优于试验1。这可能是由于在同化试验中的水深参数估计中出现了“少数服从多数”的现象,即EAKF 方法根据大部分观测信息来调整水深,使观测信息较多的地方水位模拟结果得到改进,而观测信息较少的地方水位模拟结果反而变差。具体来说,在试验1 中,黄海北部的模拟结果更好,渤海的模拟误差则较大,其余验潮站位置处接近对比试验。而试验2 中江华湾区域改进明显,渤海和黄海北部的误差则接近对比试验。这表明在先验水深小于20 m 且非渤海区域的NAO.99Jb 数据使EAKF 更倾向于优化黄海北部地区。这也说明去除这些观测信息后,其余观测信息的比重被调整,反而使更多区域的水深参数被优化。
在图8a 和图8b 中,试验2 相较试验1 得到优化的站点共20 个。其中,渤海和江华湾部分的振幅得到改进,尤其是江华湾区域的改进尤为明显;而黄海北部和南部反而变差。在图8c 和图8d 中,试验2 的迟角优于试验1的验潮站同样是20 个。其中,黄海北部、渤海和黄海东南部的提升较为明显,江华湾、黄海西部和南部则有所下降。因此,试验2 虽然在整体上振幅和迟角的误差更小,但误差的空间分布没有明显改进,说明在后续的研究中仍需要进一步探索如何改进参数估计的同化试验方案。
此外,由图8c 和图8d 可见,试验1 中葫芦岛站(图1)中4 号的迟角存在较大误差,达到了175°10′,几乎是反位相。对照其地理位置可以看出,该处距离渤海北部的无潮点较近(图7b)。由于无潮点模拟位置的偏移,在该点处产生了较大的误差,从而也导致了试验1 模拟的迟角整体误差大幅增大(表3)。如果误差统计中不考虑该验潮站的迟角误差,则试验1 模拟的迟角误差为16°36′。相比较而言,对比试验的迟角误差则为16°56′。因此,从这个角度来说,试验1 相较于对比试验,迟角的模拟仍然有所改进。这从对比图7b和图7f 中验潮站误差变小的个数上也可以得到佐证。

图7 试验1(a,b)、试验2(c,d)和对比试验(e,f)的振幅(a,c,e;单位:cm)和迟角(b,d,f;单位:(°))及其在各个验潮站位置的数值相较于同化前的变化情况Fig.7 Amplitude (a,c,e;unit:cm) and phase lag (b,d,f;unit:(°)) from experiment 1 (a,b),experiment 2 (c,d) and NAO.99Jb data assimilation experiment (e,f),and change of errors at each tide gauge

图8 模式先验、对比试验、试验1 和试验2 的振幅(a,b)和迟角(c,d)在验潮站位置处的均方根误差Fig.8 Amplitude (a,b) and phase lag (c,d) root mean square errors of the prior,NAO.99Jb data assimilation experiment,experiment 1,and experiment 2 with respect to the tide gauges

表3 同化前、试验1、试验2 和对比试验与验潮站振幅、迟角的平均空间误差Table 3 Spatial averaged errors of amplitude and phase lag from the model,experiment 1,experiment 2 and NAO.99Jb data assimilation experiment with respect to those from tide gauges
在上述实际数据同化试验中,4 个水深参数的调整量分别约为6 m、-4 m、15 m 和10 m。需要说明的是,不同于理想数据同化试验有“真实”的水深参数可供比较,对于实际数据同化试验来说,并没有这样的“真实”水深存在。而对于数值模式来说,其模拟结果的误差主要来自模式的动力框架本身以及不确定的开边界条件、底摩擦系数和水深。因此,在本研究中,由于只进行了水深的参数估计,上述模式的动力框架本身以及不确定的开边界条件和底摩擦系数所导致的模拟误差都涵盖在水深参数的调整中。因此,调整后的水深其实并不代表实际海域所观测的水深。
5 结论
本研究基于集合调整卡尔曼滤波(EAKF)方法,采用广义坐标系统的美国普林斯顿大学海洋模式(POMgcs)的外模式开展了渤海和部分黄海海域M2分潮模拟中的水深估计研究。通过理想数据同化试验(又称孪生试验)和基于NAO.99Jb 与验潮站数据,并采用强化的参数校正数据同化方法(DAEPC)的实际数据同化试验结果的讨论分析,得出主要结论如下。
(1)EAKF 方法在理想数据同化试验中可以实现对潮汐潮流模拟中的水深参数的最优估计,还原水深参数的“真实场”。这表明,EAKF 方法可以很好地应用于潮汐潮流模拟中的状态场和参数估计。
(2)在实际数据同化试验中,利用DAEPC 方法开展了状态和水深参数估计。当仅使用NAO.99Jb 数据作为观测时,EAKF 方法可以通过实际的水深估计,提高数值模型对M2分潮振幅和迟角的模拟精度。相较于NAO.99Jb 数据,水深参数估计后的振幅误差减小了30.65%,迟角误差减小了33.86%。
(3)在NAO.99Jb 数据基础上加入验潮站数据的水深估计试验中,通过研究改进观测系统,进一步提高了水深估计的效果。对比验潮站数据,模拟的M2分潮振幅与迟角误差相较于同化前分别减小了40.27%和49.19%。在先验水深小于20 m 且非渤海的区域仅使用验潮站的观测信息后,水深参数估计可以在整体上进一步提高M2分潮的模拟效果,但误差的空间分布没有明显改进。
值得注意的是,在实际数据同化试验中,江华湾区域的误差最大。这是由于该区域海底地形复杂,且水深较浅,数值模式本身模拟结果的准确度不高。即使进行了数据同化,对状态场和水深参数估计后,该区域的误差仍然较大。因此,需要在本研究的基础上,进一步开展数值模式调试的同时,设计更为适合的数据同化方案,以提高状态场和参数估计的效果。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
消费电子(2021年7期)2021-08-10
北京航空航天大学学报(2020年10期)2020-11-14
小学生作文选刊·中高年级版(2017年10期)2017-11-07
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
表面工程与再制造(2014年2期)2014-02-27
中小企业管理与科技·下旬刊(2009年9期)2009-03-08
中学生数理化·七年级数学人教版(2008年10期)2008-01-21