
便携式雷达三脚架系统结构设计
2022-07-20 08:14方益奇郑国威唐春荣
南方农机 2022年14期
方益奇 , 郑国威 , 崔 航 , 唐春荣
(西安电子工程研究所,陕西 西安 710100)
便携式雷达是轻量化雷达的一种,其能满足随作战者对作战环境的快速转移,具备较强的机动性。雷达对三脚架的重量和体积要求较高,不仅要求其具有一定的承载能力,以满足便携式装备的架设需求,同时还要求具有足够的强刚度,以抵抗相应的风荷等恶劣环境。三脚架系统是便携式雷达的载体,应能满足雷达快速架设和撤收、方便转运、架设受场地约束小等要求。因此,作为便携式设备,三脚架应具备重量轻、刚性好、便于操作、人机工程好等优点,要能够满足在野外作战与工作的需求[1-3]。
1 三脚架系统的结构组成
三脚架系统由三脚架、俯仰云台、方位云台、调平底座组成,如图1所示。

图1 三脚架系统
三脚架系统自带手动俯仰和方位云台。俯仰云台采用机械摩擦力矩锁紧,俯仰范围为-10°~+35°,方位云台的调整范围为360°周圈。云台和调平底座的材料为2A12(T4)状态,具备良好的力学性能,各零件作AL/Et.A(s).Cl(BK)表面处理。安装电动的伺服转台时,需使用调平底座。伺服工作时其对安装基准有较高的要求,所以需同时安装调平底座,用于满足伺服转台工作时的水平架设需求。
如图2所示,调平碗口与调平圆球之间涂7007润滑脂,以确保两者之间可以自由转动,调平支撑为Tr16×2-7H/7e的梯形丝杠,其具备理论自锁能力。

图2 调平底座
通用快锁机构如图3所示。其由上、下快装板组成,与市面上通用的三脚架快装板结构的接口完全一致,具备互换性。快速锁紧机构采用机械锁紧,上快装板分别安装在雷达底部、伺服底部,下快装板分别安装在俯仰云台顶部、伺服顶部和三脚架顶部以完成不同工作模式的快速切换。采用通用快锁机构可使选配安装伺服时的结构实现。在各连接单体均预留3/8英寸螺纹接口,便于和市面通用三脚架互换使用。
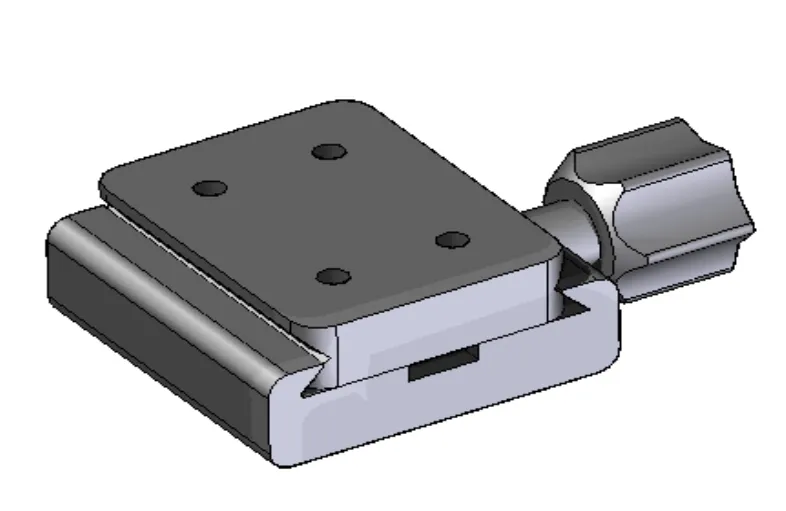
图3 快锁机构
俯仰云台与方位云台采用机械摩擦力锁紧,简单可靠,满足重量轻的要求。方位云台和俯仰云台的相对转动件两者之间的间隙设计非常重要,缝隙太大,无法将上转台固定在合适角度,缝隙太小,则上转台与固定座间的摩擦力太大,转动过于困难。采用M12螺母摩擦力锁紧,锁紧力矩大。锁紧手柄末端设计有六方预紧扳手槽,需要时可同时采用标准内六方扳手进行预紧。如图4所示。

图4 俯仰云台
俯仰云台由轴端挡圈、锁紧轴、内俯仰座、橡胶圈、锁紧手柄、六方扳手槽、外俯仰座等组成。俯仰云台设计有两个轴,一个是俯仰转轴,一个是锁紧轴。上转台外侧左右两面设计有多个橡胶圈,橡胶圈可增大固定与转动之间的摩擦阻力。
手动方位云台如图5所示,其由上转台、下转台、方位锁紧轴等组成。手动方位转台的锁紧通用靠摩擦力实现,简单可靠。
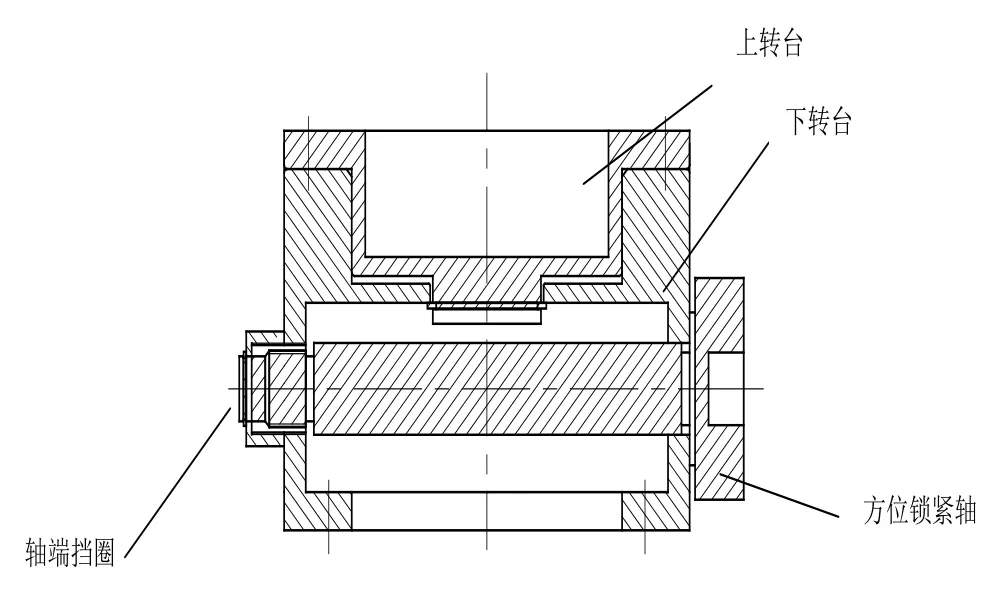
图5 方位云台
多节伸缩杆的锁紧也是三脚架设计的关键,常见的锁紧结构形式如图6所示。伸缩杆的锁紧原理分为轴向锁紧和径向锁紧两种,轴向锁紧如图6(a)所示,其主要利用螺纹预紧后产生的锁紧力。市面上千元级别的三脚架均采用此锁紧形式,该锁紧结构简单,价格便宜,但是抽拉限位较差,抽拉旋转过度时,各伸缩杆容易脱节。
径向锁紧原理如图6(b)所示,径向锁紧采用摩擦力径向方向从外伸缩杆压紧到内伸缩杆。该结构形式常用于军品雷达三脚架,优点是锁紧可靠,内外伸缩杆不会产生脱杆,但是锁紧机构重量较重,同时外观具备凸起较多,美观性稍有不足。
图6(c)是采用楔形环结构,将螺纹的锁紧力同时分解到轴向和径向。两个方向同时锁定,具备较高的锁紧可靠性,同时外表面轮廓连续,不容易刮擦设备,具备较好的使用性。

图6 伸缩杆锁紧原理
2 系列化、模块化的单体
模块化最大的优点在于利用相同或者近似的原理,可形成系列化的产品,满足不同型谱设备的使用需求[4]。由于雷达的自重和大小不同,其对相应的方位、俯仰机构以及快装结构均有不同的要求。
由于方位转台、俯仰转台、快装机构分别自下而上采用搭积木的方式堆积在三脚架的顶部球碗上,所以三者的负载应该逐步增加,包括其上装的所有载荷。
标准化、模块化、系列化的雷达快装机构,具备小、中、大三种型号,对应负载分别为10 kg、20 kg和30 kg;标准化、模块化、系列化的手动俯仰云台,具备小、中、大三种型号,对应负载分别为15 kg、5 kg和35 kg;标准化、模块化、系列化的手动方位云台,也具备小、中、大三种型号,对应负载分别为20 kg、30 kg和40 kg。
3 三脚架的刚强度分析
三脚架是整个雷达的载体,其应具备很高的刚性和强度。与此同时,作为便携式设备,又要求三脚架的重量尽量轻。所以本研究在满足设计约束的条件下进行优化设计与分析。当风速为30 m/s,三脚架上的设备能够正常工作。在给定三脚架承重负载和风力载荷的前提下,进行三脚架的结构稳定性分析,其最大变形为0.189 mm。
进行仿真优化设计过程如下:简化模型,将各连接体、紧固件等进行刚性连接处理,略去倒角圆环等轮廓;选择材料及单元属性定义,定义材料属性,将其赋给几何体;加载方式,考虑雷达结构重量及30 m/s风载的影响,含伺服机构的结构,额外考虑伺服机构2 rad/s的转动角速度给结构带来的离心力,仿真结果如图7所示。

图7 仿真分析
解算到雷达阵面的基准精度[5-6]计算如下:雷达阵面的指向精度直接影响到雷达对被探测目标的测角精度,雷达转台方位旋转或者天线阵面所受的风载荷以及转台中心相对三脚架的位置均是随机变化的,天线平台的随机变形量最终会产生转台的水平精度误差,影响天线阵面指向精度[7-8]。当天线阵面处于不同朝向时,在30 m/s的阵面风载下,转台安装面中心点相对撑腿的变形值最大可达0.189 mm,通过计算可量化该变形值对转台水平度的影响,三脚架变形对水平度影响的误差为Δ1:

Δd为三脚架变形值,L为安装面中心点相对最近撑腿的水平距离,取1.2 m[9-10]。另外,结合三脚架的调平精度误差为Δ2=0.3角分。
以上可知,雷达安装的三脚架平台水平度最大误差:

4 结论
本研究分析了便携式雷达三脚架的基本结构组成,并列举了系列化的各单体,以满足不同载荷下的安装需求。通过仿真计算分析,轻量化设计的三脚架满足雷达在风载和自重载荷下的安装使用需求。
猜你喜欢
西华大学学报(自然科学版)(2021年5期)2021-09-14
河北画报(2021年2期)2021-05-25
山东理工大学学报(自然科学版)(2021年4期)2021-05-12
甘肃教育(2020年8期)2020-06-11
作文成功之路·小学版(2020年11期)2020-02-01
专用汽车(2018年7期)2018-07-24
摄影之友(影像视觉)(2017年10期)2017-11-07
航天工业管理(2017年4期)2017-05-12
恋爱婚姻家庭·养生版(2016年7期)2016-07-05
当代旅游(2015年10期)2016-03-07
