
折纸机构折叠过程不共点折痕的位置分析
2022-07-19 04:36:32王锋,张帆
重庆工商大学学报(自然科学版) 2022年4期
王 锋, 张 帆
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
0 引 言
折纸是根据其折痕分布折叠,不需要剪切和粘贴就可以把完整纸张折叠为所需形状的一种特殊的艺术活动。从折纸衍生出的折纸机构,因为具有节省空间、便于存储运输的优点而在实际中应用广泛。在日常生活中,便携式折叠餐具[1]、易于搭建的折叠庇护所[2]等设计都为人们的生活提供了极大的便利。在航天领域,基于折纸原理的太阳能帆板[3]和空间天线反射面[4]等设计不仅提供了更高的空间利用率,而且也为航天事业的顺利进行提供了保障。在医疗方面,折纸的应用使得微创手术抓取器[5]和心脏支架[6]等手术器械能够更好地在人体内的狭小腔道工作,从而提高了手术的成功率。
折纸能否实现刚性折叠一直是学者们研究的重点之一。在过去的研究中,有学者提出了四元数和对偶四元数法来判断折叠过程的自相交能力[7],利用非线性迭代算法来预测折纸机构的折叠行为[8],也有利用折纸机构自由度分析[9]或利用折角乘数根据扇面角分布[10]等方式来判断折纸机构的刚性可折叠性。然而,折叠平面是否发生变形仍然是判断折纸机构刚性折叠特性的最直接显著的方法。若折叠平面发生变形,则该平面内相邻折痕之间的相对距离发生变化。因此,计算折叠过程中折痕的空间位置对判断折纸机构刚性折叠特性具有重要意义。
单顶点折纸是最简单的折纸单元,同时也是多顶点折纸的重要组成部分[11]。由多个单顶点折纸所围成的中心平面的存在不会影响多顶点折纸的折叠效果[12],但是多个顶点的存在产生了不共点折痕这一多顶点折纸中的典型折痕分布形式。汇交于同一个顶点的折痕之间位置变换只有相对折痕的旋转,而若要确定不共点折痕的空间位置不仅有旋转运动还有平移运动,因此不共点折痕增加了折叠过程中折痕空间位置的计算难度。现有的绕任意轴的旋转变换矩阵为坐标系变换,坐标系原点空间位置始终保持不变,变化的只是X、Y和Z轴的方向[13]。然而,在确定全局坐标系后,折纸机构折叠过程中折痕上点的空间位置不断变化,现有方法使用时并不简便。为简化折叠过程中折痕空间位置的计算分析过程,本文通过构造原折痕的平行折痕把各不共点折痕汇交于同一顶点,将不共点折痕的空间运动分解为旋转运动和平移运动两部分,使得在分析多顶点折纸时计算不共点折痕的空间位置更加简便,也为确定折纸机构不可折叠时折叠平面的变形形式做了铺垫。
1 一对不共点折痕折叠过程位置分析
大多数折纸使用软质纸或其他柔性材料制成,但是在实际应用中的一些特殊环境要求折纸机构既具有折纸便于折叠提高空间利用率的特点,又不允许折叠平面发生变形。折纸的刚性折叠特性是指在折叠过程中折纸平面始终保持刚性,而不可发生拉伸弯曲和扭转变形。若折纸不能实现刚性折叠,则折叠平面必然发生某种变形。又因为相邻折痕所夹折叠平面在折叠过程中的位置变化可以根据平面内两条折痕的相对位置确定,若折叠平面变形说明该平面不满足刚性条件[14],平面内相邻折痕的相对位置发生变化。因此,可以通过相邻折痕在折叠过程中相对位置变换判断折纸机构的刚性折叠特性。由于多折痕折纸中相邻折痕的空间位置变化较为复杂,将位置变化分解计算对确定折痕空间位置有着重要意义。通过三顶点折纸机构中一对相邻不共点折痕的简单位置变化说明不共点折痕运动分解的过程如下:
将折痕视作旋转关节,把折叠平面视作绕旋转关节转动的连杆[15]。取折痕Lith长度相等,令Sith为折痕Lith和L(i+1)th所夹折叠平面,θith为折叠平面S(i+1)th绕折痕Lith相对Sith旋转的旋转角。若不汇交于同一顶点的折痕L1和L2分别交直线AB于点A和点B,在旋转角θith=0的初始状态下,折痕位置如图1(a)所示。令s=sin,c=cos,下文不再描述。
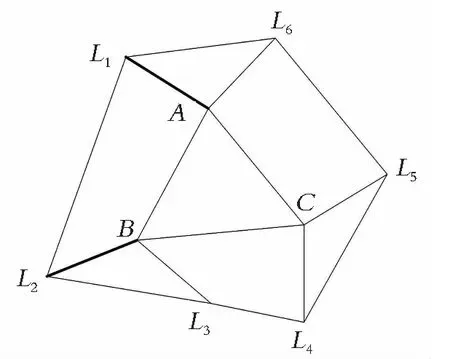
(a) 三顶点折纸
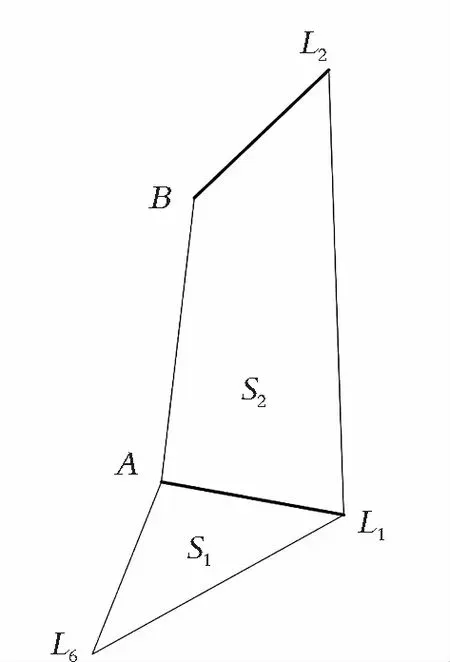
(b) 相邻的不共点折痕图1 不共点折痕初始状态位置分布Fig. 1 Initial position distribution of non-intersect creases
以点A为原点,沿折痕L1远离A点方向为Y轴正方向,向量BA方向为X轴正方向,建立全局坐标系{A}如图2(a)所示,其中Z轴正方向满足右手定则。将折叠平面S1固定为基座,L1作为旋转轴,因为折痕L1和L2不汇交于同一点,为确定折痕L2在绕折痕L1旋转θ1后的空间位置,过点A作折痕L2的平行线段l2,其中点D是折痕l2上一点,点B、C是折痕L2上两点,则L1、L2和l2在初始状态下如图2(b)所示。令折痕长度lAB=lL1=lL2=l,折痕L2与Y轴夹角为α,则点B、C和D相对于全局坐标系{A}的位置向量分别如式(1)所示:
(1)

(a) 以点A为原点对该不共点折痕初始状态建立坐标系
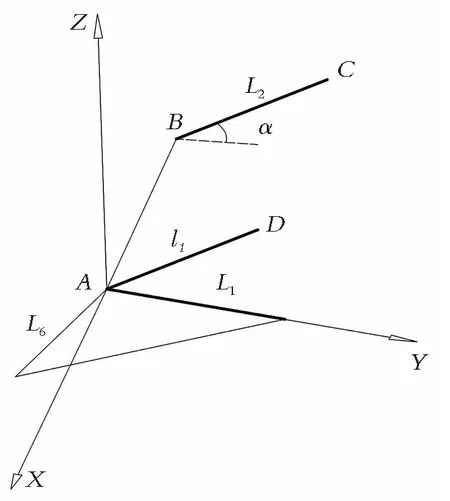
(b) 在初始状态下构造折痕L2的平行折痕l2图2 一对不共点折痕位置分析
1.1 直接旋转
折痕的位置变化可通过折痕上两个点的位置变化来判断,所以可以通过点B、C的位置变化来确定折痕L2在绕折痕L1旋转θ1之后的位置。且折痕L1与Y轴重合,将折痕L2直接绕折痕L1旋转θ1得L2′,其旋转矩阵如下:
(2)
所以折痕L2在绕折痕L1旋转θ1后点B′、C′相对全局坐标系的位置向量如下:
(-l·(1+cα)·cθ1l·sαl·(1+cα)·sθ1)T
(3)
1.2 先旋转后平移
将l2绕折痕L1旋转θ1得l2′,如图3(a)所示。此时l2绕折痕L1旋转的旋转矩阵如下:
(4)
则l2′上点D′的位置向量如下:
(-l·cα·cθ1l·sαl·cα·sθ1)T
(5)
由于点B是L2与线段AB的交点,所以线段AB绕L1旋转θ1后得到的点B″同时也是L2′上的点。如图3(b)所示,线段AB绕L1旋转θ1后得AB″,此时点B″的位置向量如下:
(6)
根据点A和点D′相对全局坐标系的位置向量,可以得到l2′在全局坐标系的位置。
如图3(c)所示,将l2′沿向量AB″方向平移|AB″|得l2″,其平移矩阵如下:
(7)
因此l2″上点A″和D″相对全局坐标系的位置向量如下:
(8)
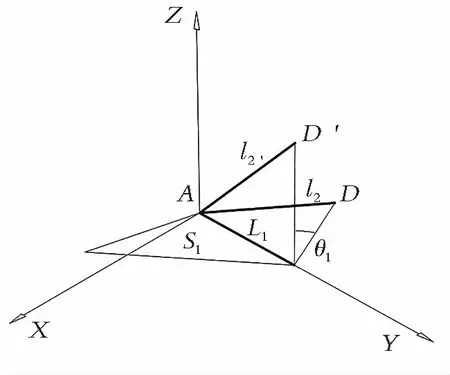
(a) 平行折痕l2绕折痕L1旋转θ1

(b) 线段AB绕折痕L1旋转θ1
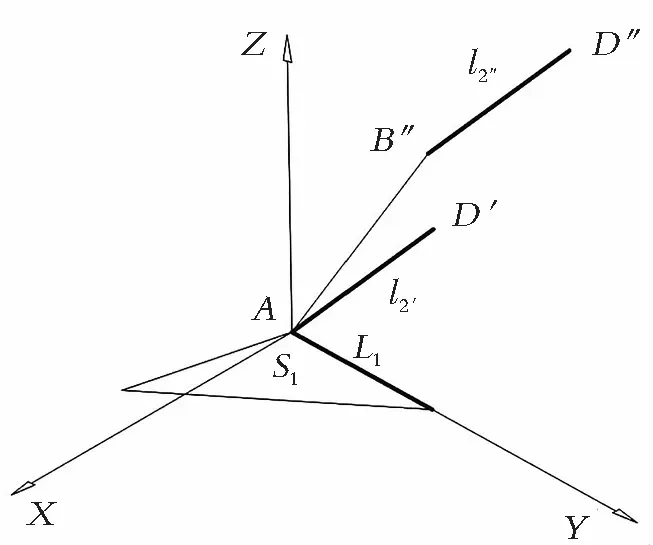
(c) l2′沿向量AB″平移图3 不共点折痕运动分解
通过点A″和D″相对全局坐标系的位置向量,可以得到l2″在全局坐标系的位置,且根据式(3)和式(8)可知l2″与L2′重合。综上所述,折痕L2直接绕折痕L1旋转θ1所得折痕空间位置与l2先绕折痕L1旋转θ1再沿向量AB″方向平移|AB″|所得折痕空间位置一致。因此,在计算不共点折痕折叠过程空间位置时,可以将折痕运动分解为旋转和平移两部分。
2 多条不共点折痕位置分析
2.1 3条不共点折痕折叠过程位置变换
前文中叙述了折纸机构的一对不共点折痕在折叠过程中的位置分析,但是对于一个完整的首尾相连的多顶点折纸机构需要判断的是给定折叠平面绕折痕旋转一定角度后各条折痕的空间位置变化。这一节利用前文不共点折痕的运动分析方法,通过给定几何参数验证3条不共点折痕中末端折痕的位置变化,并利用AutoCAD软件进行空间坐标验证。
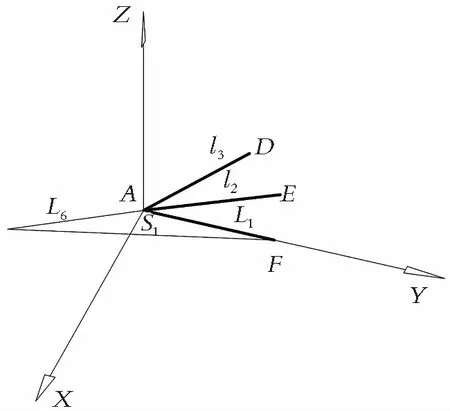
如图4(a)所示,三顶点折纸的3条相邻折痕L1、L2和L3分别交于中心三角形的3个顶点A、B和C。在折叠过程折痕L3的空间位置由绕折痕L1转动的旋转角θ1和绕折痕L2转动的旋转角θ2共同决定。以点A为原点,向量AF方向为Y轴正方向,Y轴正方向顺时针旋转90°为X轴正方向,建立全局坐标系{A},如图4(b)所示,其中Z轴正方向满足右手定则。点A和F为折痕L1上两点,点B和E为折痕L2上两点,而点C和D则为折痕L3上两个点。将折叠平面S1在XY平面上固定为基座,取lAF=lBE=lCD=lAB=lCD=100,AB和折痕L2与Y轴正方向夹角都为30°,AC和折痕L3与Y轴正方向夹角都为60°。点B、C、D和E在旋转角为0的初始状态下相对全局坐标系的位置向量如下:
(9)

(a) 三顶点折纸初始状态各折痕分布

(b) 以点A为原点对该3条不共点折痕初始状态建立坐标系

(10)
l3绕l2旋转θ2的旋转矩阵如下:
(11)

(12)
又因为点B是L2与线段AB的交点,所以线段AB绕L1旋转θ1后得到的点B′同时也是L2′上的点,同理可得点线段AC绕AB旋转θ2后得到的点C′同时也是L3′上的点。线段AC绕AB旋转θ2的旋转矩阵如下:
(13)
将线段AB绕L1旋转θ1,且线段AC绕AB旋转θ2后得AC′,此时点C′的位置向量如下:
(14)
如图5(b)所示,将l3′沿向量AC′方向平移|AC′|得l3″,其平移矩阵如下:
(15)
因此l3″上点A″和D‴相对全局坐标系的位置向量如下:

(16)
当θ1=θ2=30°时,根据式(9)—式(16)可得此时点A″和D‴在全局坐标系下的位置向量为
通过点A″和D‴在全局坐标系下的位置向量,可以得到点A″和D‴在全局坐标系下的三维坐标为A″(-99.551 3 92.403 8 107.476 0)和D″(-157.027 2 145.753 2 169.527 2),所以确定了l3″在全局坐标系的位置。
因为折痕L3在折叠平面S3内,折痕L2在折叠平面S2内。若折叠平面S3直接绕折痕L2旋转θ2,然后折叠平面S2直接绕折痕L1旋转θ1。当θ1=θ2=30°时,利用AutoCAD测得旋转之后L3上点C‴L3′和点D‴L3′三维坐标为C‴L3′(-99.551 3 92.403 8 107.476 0)和D‴L3′(-157.027 2 145.753 2 169.527 2)。
综上所述,折叠平面S3直接绕折痕L2旋转θ2,然后折叠平面S2直接绕折痕L1旋转θ1所得折痕L3的空间位置,与l2绕折痕L1旋转θ1且l3绕l2旋转θ2再沿向量AC′方向平移|AC′|所得折痕空间位置一致。
(a) 构造折痕L2和L3的平行折痕l2和l3
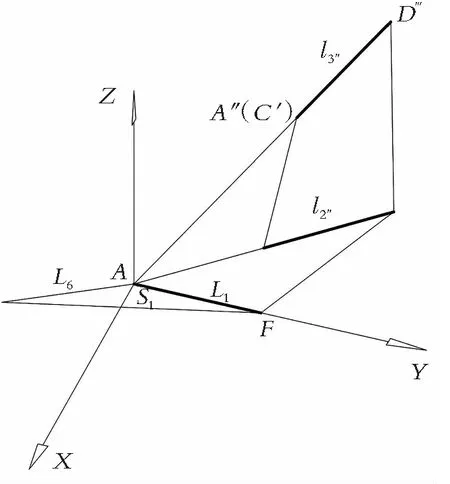
(b) 平行折痕l3旋转后沿向量AC′平移
2.2 三顶点折纸不共点折痕位置分析及刚性折叠 特性判断
分析不共点折痕位置的主要目的是为了方便判定并确定折纸机构是否具有刚性折叠特性,下文以具有一对平行折痕的三顶点六折痕折纸机构进行分析。如图6(a)所示,令6条折痕为等长折痕,顶点A、B和C处各扇形角均满足对角互补条件,且折痕L1与L6平行,机构逆时针运动。
固定折痕L1为X轴,取LAB=LAC=Lith=1,i=1,2,…,6,且α=110°,β=35°,γ=90°,ε=55°,γ=δ=125°。各折叠平面厚度取为10,折痕在折叠平面边缘中心线处。利用前文所述方法计算在旋转角θith从0到π之间变化的折叠过程中折痕L6的空间位置变化,其中相邻折痕L1与L6之间相对位置变化如图6(b)所示。在旋转角θith从0到π之间变化的折叠过程中BD长度始终保持不变,然而DE和AE长度先增大后减小。利用ADAMS刚柔耦合模块进行运动仿真和有限元分析,折痕L6与L1所夹折叠平面S6变形情况如图7所示,其结果与图6(b)分析相符合,所以折叠平面发生变形,该折纸机构不具有刚性折叠特性。
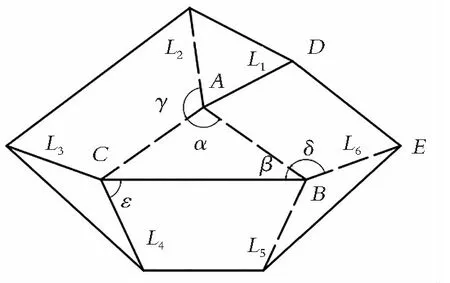
(a) 三顶点六折痕折纸机构

(b) 折痕L1与L6之间相对位置变化图6 折纸机构刚性可折叠性判断

(a) 旋转角为30°时折叠平面S6变形情况
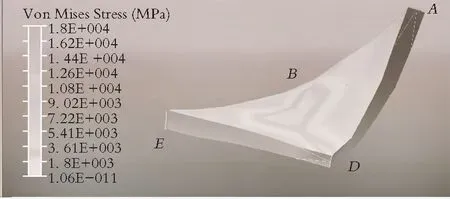
(b) 旋转角为90°时折叠平面S6变形情况图7 ADAMS刚柔耦合分析
3 结 论
为研究折纸机构在折叠过程中不共点折痕的空间位置变化,提出通过构造不共点折痕的平行折痕将各不共点折痕汇交于同一顶点的方法将不共点折痕的空间位置变化分解进行分析,并根据折痕空间位置变化对折叠平面变形的影响确定折纸机构的刚性折叠特性。
通过对一对不共点折痕和3条不共点折痕的运动分解和具体参数下的验证分析,结果表明:将不共点折痕的空间运动分解为旋转运动和平移运动两部分进行计算,这种方法简化了折叠过程中多条不共点空间位置的计算过程,并且计算所得折痕位置与折痕绕既定折痕直接旋转所得折痕的空间位置一致。通过判断相邻不共点折痕之间相对空间位置变化可以更直观地确定折叠平面是否发生变形以及该折纸机构是否具有刚性折叠特性。
猜你喜欢
当代陕西(2022年5期)2022-04-19 12:10:46
纺织科学研究(2021年7期)2021-12-02 02:56:27
河南科学(2020年3期)2020-06-02 08:30:10
金融法苑(2018年2期)2018-12-07 00:59:52
青春(2017年5期)2017-05-22 11:57:33
娃娃画报(2016年9期)2016-11-12 11:19:24
小学阅读指南·低年级版(2016年2期)2016-09-10 07:22:44
小学阅读指南·低年级版(2016年4期)2016-05-14 22:36:19
小学生导刊(2016年16期)2016-04-11 07:14:10
读写算(下)(2015年6期)2015-08-22 05:57:56
