
名优茶采摘末端执行器关键技术研究进展
2022-07-16 06:18张智浩朱立学林桂潮张世昂官金炫
现代农业装备 2022年3期
张智浩,朱立学,林桂潮,张世昂,官金炫
(仲恺农业工程学院机电工程学院,广东 广州 510220)
0 引言
中国是世界上最大的茶叶生产国和消费国[1],茶叶采摘是茶叶生产中的关键环节[2],根据茶叶的采摘标准,可分为大宗茶和名优茶,大宗茶的鲜叶采摘标准是一芽两叶、一芽三叶或者嫩度相近的对夹叶,名优茶对鲜叶的嫩度和完整性要求较高,采摘标准是单芽或者一芽一叶,以及一芽两叶初展的新梢[3-6]。中国现有的茶叶采摘方法有人工采摘和机械采摘[7],人工采摘质量好,但劳动强度高、采摘效率低,机械采摘效率高,但茶叶质量低。国内外学者已经对大宗茶采摘机械进行了大量的研究工作,20 世纪初,日本最先开始研究大宗茶采茶机械。30 年代,前苏联的农学家发明了第一台轮式采茶车,其收获部件以往复式切割机为核心。50 年代,中国才开始大宗茶采摘机械自动化设备的开发,2012 年农业部南京农业机械化研究所肖宏儒等研发了第一台履带乘坐式全自动采茶机[8],到目前为止,大宗茶叶的采摘已经基本脱离人工,大宗茶机械化采摘已逐渐成熟并投入到茶叶生产中。名优茶在中国茶产业中的地位日益突显,虽然这种采茶机的使用与人工采茶相比提高了采茶效率,但往复切割采茶机采用了“一刀切”的采茶方式切掉茶树顶部的叶芽,缺乏对幼叶和老叶的选择性,错采率、漏采率和破损率都很高,不能满足高档名优茶鲜叶标准[1,4,5,9-11]。目前,茶叶嫩芽采摘基本是人工完成,茶农通过观察判断芽叶的大小和成熟度,获得的茶叶具有较高的匀整度。然而,人工采摘有一定的局限性,茶叶嫩芽采摘的黄金周期较短,采摘工作繁重,需要大量劳动力长时间采摘[9,12-14]。由于农业劳动力短缺和新冠病毒的影响,采茶成本一直在上升[15,16],占茶叶生产劳动力成本的60%以上[1],制约了名优茶产业的可持续发展。因此,采茶机器人的研究与开发迫在眉睫,这也是数字农村农业的发展需求。
名优茶的采摘目标是茶叶嫩芽,茶叶嫩芽尺寸较小且个体间存在一定的形状差异,生长环境比较复杂,空间分布密集,易被遮挡,茎叶较柔软,在采摘过程中极易造成损伤,如图1[17]、图2 所示。传统的采茶末端执行器已然不适用,末端执行器在一定程度上影响采茶效率和茶叶嫩芽破损率,对提高采茶机器人整体执行效果起着非常重要的作用。本文对农业采摘末端执行器及名优茶采摘机器人末端执行器的国内外发展现状、应用情况进行阐述,总结出名优茶采摘机器人末端执行器目前存在的问题,提出了名优茶采摘机器人末端执行器的改进措施及未来发展前景。

图1 目前大宗茶普遍采摘情况

图2 茶叶嫩芽空间分布情况
1 农业采摘末端执行器的现状
由于名优茶的采摘要求相对较高,实现难度较大,对智能采茶机器人末端执行器的研究相对较少。末端执行器作为采摘机器人的关键部件,在许多农业领域都有较为成熟的农业采摘机器人末端执行器执行方案,可以为名优茶叶末端执行器的结构设计提供相应的指导[18]。西北农林科技大学Y.CUI 设计了一种草莓采摘末端执行器,用1 个夹持器夹持草莓,然后通过切割器切断水果果梗[19]。殷红梅设计了采花机械手的末端执行器,通过控制末端执行器的开合,闭合时槽抓固定花卉,然后利用弧形刀片切割花梗,实现花卉的夹持和采摘[20]。昆明理工大学王彦钧设计了一种仿生食用玫瑰花手指采摘末端执行器,采摘过程中,在抓取手指和套筒作用下,抓取并切割玫瑰花茎,完成玫瑰花采摘动作[21]。西北农林科技大学傅隆生等研究了猕猴桃无损采摘末端执行器,通过手指抓旋转分离相邻的果实,抓取并扭断果梗以采摘果实,结果表明,该方法的成功率达到96.0%,平均单果耗时22 s[22]。华南农业大学叶敏等设计了一种仿真拟人夹指末端执行器,模拟了人体2 指夹持小圆柱体的状态,食指弯曲成一定角度,母指配合完成夹紧。结果表明,采摘成功率可达90% 以上,夹持效果良好,对荔枝果实无损伤[23]。江苏大学尹建军等设计了一种双指葡萄采摘装置,通过双指上的旋转切割部带动圆盘刀切割果梗,实现葡萄的采摘,试验结果表明,该装置的采摘成功率为100%,果实破损率为5.2%,不考虑视觉定位耗时,完成1 次采摘动作的平均耗时为29.4 s[24]。比利时ANDREAS DE PRETER 等设计了一款草莓软体夹持末端执行器,在夹持草莓时,接触面积较大,对草莓的损伤较小,抓取草莓后,它轻轻地拉动草莓并旋转以采收草莓[25]。挪威生命科学大学YA XIONG 和美国明尼苏达大学CHENG PENG 等设计了一种草莓采摘末端执行器,将草莓抓取并包裹在容器里,在容器内用刀片切断水果果梗[26]。
国内外学者的现有研究表明,农业采摘末端执行器大多通过直接接触果实,对果实进行夹持再用切割器切割果梗,完成采摘工作,再通过机械臂复位,将果实放进收纳箱中。水果种类繁多,生长形态各异,现有的果实采摘末端执行器已基本适应各类水果的采摘,因此具有多种样式、结构、形态的采摘末端执行器,基本满足目前农业采摘要求。但仍存在以下不足,一是末端执行器通用性不高,末端执行器结构较为固定,使用时只能针对一种或形状相近的水果进行工作,不能实现对多种水果采摘;二是末端执行器无法确保果实破损率,目前存在的末端执行器仍以刚性为主,在采收过程中存在对果实的破坏,无法保证完整性;三是末端执行器在提高采摘效率方面仍有很大发展空间,需要对采摘末端执行器进一步改善,提高采摘速度。
2 名优茶采摘末端执行器的现状
虽然智能采茶机器人的研究已经进行了多年,但国内外关于名优茶采摘末端执行器的文献数量有限,名优茶的智能采摘机器人末端执行器仍处于萌芽阶段。总体看来,根据采摘—收集方式大致可分为四大类。
2.1 夹持式末端执行器
夹持式末端执行器,由夹持机构来获取和回收果实。南京林业大学高凤等设计了一种名优茶采摘末端执行器,它利用电机提供动力,丝杠带动左右夹子做相向运动,从而完成茶叶嫩叶的采摘[12]。张于学发明了一种名优茶采茶末端执行器,通过夹持机构夹持夹住茶叶嫩芽,然后通过提升机构向上拉断叶柄,实现茶叶嫩芽的采摘动作[27]。四川农业大学许丽佳等设计了一种梯形四杆夹提式末端执行器,通过指型摆杆带动夹持件把嫩芽夹断。试验结果表明,一芽一叶漏采率为2.8%,采摘完整率为91%;一芽两叶缺失率小于3%,采摘完成率为94%[28]。杨化林设计了一种提采式气动名优茶采摘末端执行器,该末端执行器通过气压缸驱动,启动夹持机构仿照人工采摘动作,将茶叶嫩芽的茎夹断,然后将茶叶嫩芽送入收集装置中完成采茶[29]。青岛科技大学范元瑞等设计了一种指型采摘末端执行器,简图如图3所示[30]。通过滑块摆动杆传动,采摘时,两侧指型摆杆配合开启和关闭柔性指尖,实现茶叶的采摘和释放[30]。

图3 指型采摘末端执行器简图
2.2 剪切式末端执行器
剪切式末端执行器,利用切割器如剪刀、刀片、锯子等切断果梗。原艳芳设计了一种采茶机械手,用于采摘名优茶,通过气缸驱动刀片开合切断茶叶嫩芽,然后通过负压气吸的方式将采集的茶叶嫩芽输送到收集箱里[31]。申友航发明了一种茶叶单芽采茶机,通过红外线感应控制切割推块驱动切割指运动,用切割刀把茶叶嫩芽切掉,用压力块夹持茶叶嫩芽,然后通过复位把茶叶嫩芽落入收集箱[32]。南通大学汪旭亮等设计一种茶叶单芽采茶机,先通过吹风装置将单芽边上的嫩叶吹折,只留下茶芽,板上设有多个只允许茶叶单芽能通过的底孔,电磁铁运动带动刀片切割,完成采摘工作[33]。沈浩宇设计了一种旋折式茶叶单芽采摘末端执行器,通过气缸驱动、光信号传感器控制末端执行器夹爪的闭合,完成茶叶嫩芽采摘动作,然后通过电机驱动夹爪转动,将茶叶嫩芽放入采收盒里[34]。中国农业大学HENG LI 等设计了一种茶叶采摘夹指,在四杆机构的连续运动下,两侧的手指可以打开和闭合,闭合时,茶叶被最前端的刀片切断[7]。四川职业技术学院牟顺海设计了一种茶叶采摘末端执行器,该采摘末端执行器带有1 个集叶槽,通过连杆驱动左右刀片作相向运动,切割茶梗,再将茶叶放入集叶槽,实现采集茶叶的功能[35]。长春理工大学尚凯歌设计一种轻型收纳装置的末端执行器,能够收纳已完成剪断茶叶,末端采摘执行器简图如图4 所示。当末端手爪剪断所定位茶叶新梢,收纳装置便会随着手爪闭合而收拢,将茶叶捕获,然后将采摘茶叶放置到收集台上,并将其滑到传送带,最后将其运输到相应的茶叶收集箱中[36]。

图4 机器人末端采摘执行器开合示意简图
2.3 气吸式末端执行器
气吸式末端执行器,由吸入器靠吸力获取和回收果实。莫鹏等设计了一种手提电动采茶机,手持釆茶机将梳式导叶板插入茶丛中,使刀片对准茶叶嫩芽进行切割,使茶叶连续流入网袋中,茶农可根据茶叶大小自行选择采摘的芽叶,但釆下的茶叶嫩芽仍存在一定混杂[37]。浙江理工大学研究团队设计了一种在切割刀片上面安装气吸套筒的末端执行器。在切割茶叶嫩芽后,通过负压把茶叶嫩芽通过套筒吸入收集箱中,试验表明,采摘成功率为86.92%,采摘准确率为83.18%,每棵茶叶嫩芽的采摘时间范围在2~5 s[38]。
2.4 仿生式末端执行器
仿生式末端执行器是模仿动植物生态结构和功能特性来实现目标采摘动作。日本庆应大学KURENA MOTOKURA 等设计了一种仿真末端执行器,通过模仿人工采茶动作,用2 个机械手指实现茶叶嫩芽叶茎的采摘[39],如图5 所示。姜兆亮设计了一种腱驱动的仿生茶叶采摘末端执行器,通过电机驱动纤维绳模拟人的肌腱带动机械手指捏合刀片完成切割动作同时捏住茶叶,再通过电机反转将茶叶放入茶叶收集盒里[40]。石元值设计了一种名优茶智能双臂采茶机,采用高速运转的钢丝绳代替原有的刀片往返切割,然后利用风吸的方式将茶叶嫩芽输送到集叶箱[41]。南京林业大学郝淼等设计了一种仿生采摘手抓末端执行器,可以模仿人工“提手采”的动作,初步室内试验结果表明:采摘成功率接近70%[18]。陈勇设计了一种茶叶仿生手抓采摘末端执行器,模仿人工的“提手采”方法,通过控制夹爪的闭合,将茶叶嫩芽的茎拉断,完成茶叶嫩芽的采摘[42]。青岛科技大学马智斌等设计一种鹰嘴式名优茶采摘末端执行器,通过刀片对名优茶进行鲜叶采摘并包裹在容器里,然后将鲜叶经过出茶口进入茶叶收集装置中[43]。张铮设计了一种软辊式仿手工无破损茶叶嫩芽采摘末端执行器,将末端执行器靠近茶叶嫩芽,在采摘软辊作用下,把茶叶嫩芽摘下,并输送到收集箱中[44]。

图5 仿生双指末端执行器工作示意图
2.5 小结
名优茶采摘末端执行器的采摘方式包括气吸式末端执行器、夹持式末端执行器、仿生式末端执行器和剪切式末端执行器。以上几种采摘方式的比较如表 1 所示。
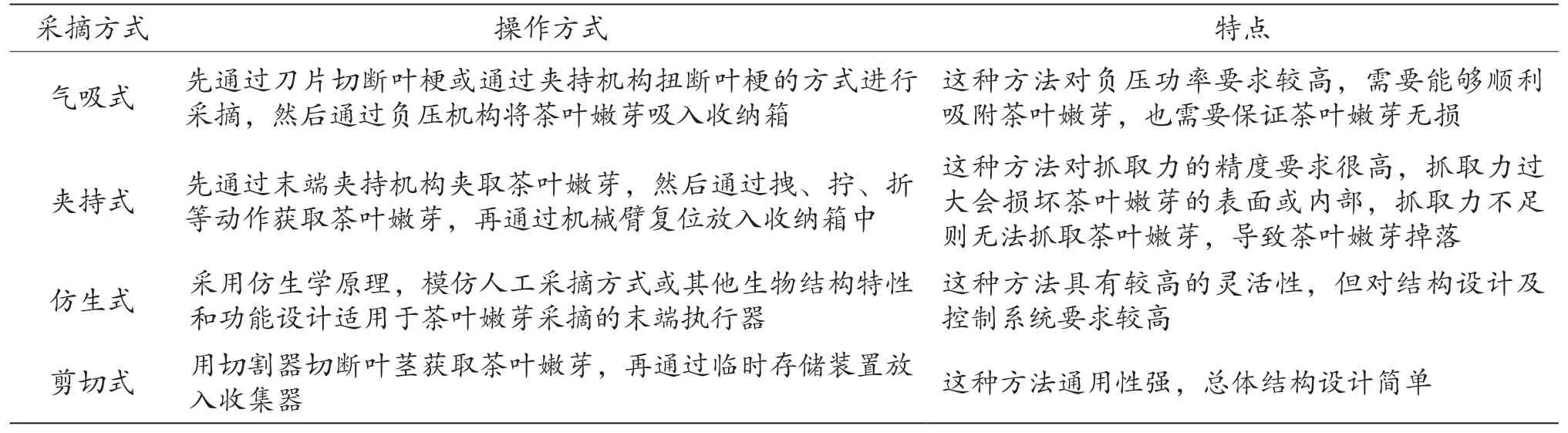
表1 采摘方式的比较
3 存在主要技术问题
现有研究工作在茶叶嫩芽视觉识别、检测定位环节已有较多成果,对名优茶采摘末端执行器的结构设计、采收方式探究有较大参考价值。名优茶采摘机器人目前尚缺乏商业化的成熟产品,大部分仍处于研究和样机阶段,距离实际应用还有很长的路。现有工作主要存在以下不足:首先,工作效率较低。人工采收茶叶嫩芽的平均时间在3~4 s,但是采用茶叶嫩芽采摘机器人,需要经过目标的视觉检测、机械臂运动定位,边缘设备计算再到达采摘点进行采摘,然后通过复位将茶叶嫩芽放入收集箱中,整个流程用时远大于人工采摘时间,采摘效率较为低下。其次,无法确保茶叶嫩芽完整性。大部分名优茶采摘机器人末端执行器依然采用传统的刚性末端执行器,在采摘过程中,不能有效地实现对多种茶叶嫩芽的无损采摘。
4 结语
名优茶采摘末端执行器在我国有着巨大的应用空间,名优茶产业在农业生产中的实际应用具有重要的意义,需要大力开展采摘技术的研究,提高采摘精度。本文通过对几类常见末端执行器的采摘方式特点对比分析,结合茶叶嫩芽的生长、形状特点和人工采摘的经验,考虑末端执行器的采摘效率和采摘成功率,采收一体式的末端执行器在克服茶叶嫩芽采摘的难题方面可能存在优势。在末端执行器尾部可以设置收纳箱,在末端执行器完成采摘工作后,将茶叶嫩芽包裹在临时存储箱中,通过简单的电机控制末端执行器的转动,使茶叶嫩芽更好的落入收纳箱中,再继续下一个采摘作业。这种方法符合理想名优茶采摘末端执行器的要求,以实现对茶叶嫩芽的高效率回收,并在较短的工作时间内完成茶叶嫩芽的采摘工作。同时,考虑使用简单、轻巧的低自由度机械臂,减少机械臂运动路径冗余,缩短作业时间,提高作业效率。在茶叶嫩芽采摘过程中,如何降低茶叶嫩芽破损率是采摘末端执行器研究与开发中的一个重点和难点问题,可结合柔性末端执行器对茶叶嫩芽进行采摘,尽量减少对茶叶嫩芽的损害。
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
电动工具(2022年4期)2022-08-22
汽车实用技术(2022年15期)2022-08-19
科学与财富(2022年3期)2022-06-01
红蜻蜓(2021年2期)2021-07-20
汽车维修技师(2019年2期)2019-08-23
阅读(中年级)(2019年3期)2019-04-24
作文与考试·小学低年级版(2017年13期)2017-07-06
科学种养(2015年11期)2015-11-10
