
基于麦克纳姆轮的全方向移动消防侦查机器人概念设计
2022-07-15 01:46严陈凯杜玉伍智泓
工业设计 2022年6期
关键词:智能化
严陈凯 杜玉 伍智泓

关键词:麦克纳姆轮;消防侦查机器人;全向移动;智能化
中图分类号:TB472 文献标识码:A
文章编码:1672-7053(2022)06-0158-03
服务机器人指从事生产的设备外,能半自主或全自主完成有益于人类服务工作的机器人,智能化是服务机器人的主要发展方向[1]。消防机器人作为特种服务机器人,可在特殊环境下执行灾情侦察、火源扑灭、人员搜救等任务[2]。时下我国经济迅猛发展,城市化日益加速,城市环境和建筑结构愈发复杂,社会生产生活中的火灾隐患增多,危险品泄漏、燃烧、爆炸等事故也时有发生。火灾情况险象环生,消防队员与被困人群同样面临生命危险,为提高救援效率和质量,消防机器人的发展已成为大势所趋。技术驱动创新,目前消防机器人在基本功能和技术实现方面已逐步完善,其在复杂险情中的应用也体现出“以人为本”的价值精神[3]。伴随人工智能和互联网技术的不断深入,消防机器人的未来发展将如何与时俱进,如何从工业设计角度提出更加精准的定位设计,是值得持续探讨的话题。
1消防机器人发展现状与未来发展方向
1.1消防机器人代替人类工作的情况日益普遍
消防机器人属于特种机器人范畴,能够代替消防人员进入高温、浓烟、缺氧、有毒、狭小空间等火灾现场,开展火场侦查任务,完成侦测破拆、灭火排烟、搜寻救人、灭火排烟等工作,既能保护消防人员的人身安全,又能提高事故发生后的消防救援能力和效率[4]。由于其依托日趋完善的机器人研发技术,具有愈发精准的自控制系统,搭载芯片的智能水准飞跃式提升,可以代替消防人员深入爆炸区域及火场,应对高危环境下的特殊紧急险情,近年来越来越受到各国研发人员的重视,得到迅速发展。
相较人工救援,机器人在消防领域具备得天独厚的工作优势,可以辅助消防官兵完成特殊环境下的救援任务,保障公共安全。从实际运用情况来看,消防机器人主要分为火场侦察机器人、灭火机器人、排烟机器人、危险物品泄漏探测机器人以及多功能消防机器人等,可以通过自适应、线控和无线遥控等方式进行操控[5]。
1.2我国消防机器人发展现状
我国消防类特种机器人起步较晚,研发及生产落后于美、日和欧洲较多,且目前国内自主研发机器人,如“JMX-LIT50”履带式机器人等仍有价格高、数图传距短、远传图像不清晰、移动平台体积大、重量沉,无法进入狭小通道等问题[6],智能消防救援装备的研制在我国火灾救援领域仍有较大进步空间。
由于我国当前研究成果较少,成品主要依赖进口,成本较高,目前普及程度十分有限。除受技术和成本限制外,现有消防机器人操控难度较高,功能相对单一,行进受限较多,信号干扰严重,配合较少,未成体系,在真正的消防工作中尚难发挥实践价值,目前在我国仅多用于预防演习和宣传活动。
1.3未来消防机器人的研发方向
消防机器人作为一种非生命的载体,可以代替消防人员深入危险区域,完成探测侦查和灭火施救。其在保证救灾人员的安全下的同时可以安全有效地对现场资料进行收集反馈,帮助消防人员在短时间内掌握火情,制定灭火救援计划,提升救援效率,争取宝贵时间。长远来看,智慧化机器人的数据收集和记录,有助于后續技术人员研究救援技术,优化救援流程,改良救援产品,实现持续良性发展。
未来消防机器人将朝着功能多样化、设备轻量化、与信息技术相结合、与人机交互技术相结合、与人工智能相结合等方向快速发展。无论未来无论机器人技术如何发展,消防机器人的设计都必须从实际灭火救援的角度出发,满足消防部队的实际需要,这样才能激发其在实际应用中的实力与潜力,逐步取代人力,在救援过程中发挥关键的作用。
具体来说,未来消防机器人的研发方向将会体现在以下几个方面。未来的消防机器人将集多种功能于一身,优化现有技术,使其不只是单一功能型机器人,而可以适配多种火场险情。机器人的轻量化设计将成为趋势,其依托材料科学的发展,一方面减少能源损耗,延长待机时间,另一方面也使其更加灵活于穿梭在狭小火场展开救援。借助5G通信技术,未来的消防机器人将依托远程控制中心,将现代化技术、材料与消防机器人相结合,添加电子技术、传感元件、可视化技术等,实现更为灵活的指挥与操控,提升消防救援的整体作战能力。机器人设计中引入VR等现代技术的人机交互模式,可以为操作者提供火灾现场高度真实的实况模拟,从而提前完成救援预测与研判,减少失误。而发展人工智能,可以在人力无法企及的情况下,引导机器人自主应对非结构化陌生现场,完成地图构建、主动识别障碍物、自主评估风险、实现路径规划、实现自主作战。
2麦克纳姆轮在消防机器人中的应用优势
麦克纳姆轮是一种可全方位移动的全向轮,是瑞典麦克纳姆公司的专利。麦克纳姆轮由轮毂和围绕轮毂的辊子组成,麦轮辊子轴线和轮毂轴线夹角成45°,在轮毂的轮缘上斜向分布着许多小轮子,即辊子,故轮子可以横向滑移。辊子是一种没有动力的小滚子,小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动,由4个这种轮加以组合,可以使机构实现全方位移动功能[7]。
由于麦克纳姆轮结构紧凑、运动灵活,能够实现机器人前行、横移、斜行、旋转及其组合运动方式,并适应多种地形,非常适合在空间有限、作业通道狭窄的火场环境中行进。若将麦克纳姆轮进行履带化设计,可以使其在拥有良好灵活性的同时拥有更好的通过性,适应更为复杂的地表情况。如能搭载双叉臂独立悬架结构的避震系统,更可增加机器人的稳定性与可靠性,拥有更好的越障与运输重载能力。
3基于麦克纳姆轮的消防机器人模块设计分析
3.1麦克纳姆轮与消防模块设计分析
基于麦克纳姆轮结构的消防机器人可具备适应性强、移动便捷的特征,机器人可以良好地适应复杂的工作环境,可搭载多种感应元件与侦查摄像头,识别和测量周围物体,实现现场侦测与人员搜寻。机器人亦可配备机械臂、全方位水枪等装备模块,根据现场情况开展障碍破除和紧急扑救。模块化设计有助于拆卸、维修、原料填充和设备升级,可使机器人适应性更强,灵活度更高,且延长使用寿命,提升工作效率。未来基于互联网技术和人工智能的发展,在成本允许的情况下,还可将研发重点转移到自动化和智能化达成上,为设备添加视觉避障、生命检测、火情评估等功能,使其可以根据工作任务和周围环境的情况,结合已有的机械设备和工作能力,确定自己的工作步骤和工作方式,实现在没有操作人员的情况下自主救援,赢得时间,挽救生命和财产。
3.2消防机器人部分模块概念设计分析
除移动行进机构外,针对消防机器人的工作性质和工作环境,基于现有的技术水平和元件发展,以下从中央控制、机械臂、感应系统、减震装置等几个模块对其进行概念设计分析。
3.2.1中央控制模块概念设计分析
控制系统是机器人的核心,其集中管理和控制行进中的机器人,以实现既定的性能指标。考虑到消防机器人是在火灾环境这样的高温条件下工作,其主体控制模块应选择耐高温的机构搭载。目前市面上多种单片机机构已可以实现高温条件下的稳定工作,加之防火耐高温材料的发展,未来的消防机器人控制系统势必确保恶劣火场环境下其自身设备的正常运转。
3.2.2机械臂模块概念设计分析
消防机器人的机械臂是保证灭火供水稳定的关键,机械臂的设计应朝着抗压、强结构、耐腐蚀、灵活便携等方向努力,保证其在供料过程中可以稳定支撑燃料管工作,可以精准喷射灭火材料。机械臂的结构形态应尽可能体现一体化设计,优化内部电机、转轴及电路系统,提升抗环境干扰能力,实现模组化,方便维修和更换。
3.2.3感应系统模块概念设计分析
感应系统是机器人检测火场情况,提供即时反馈,保障操作者人员实施交互作业的媒介。目前电子市场已能找到较多模块传感器组合体,可实现检测温湿度、烟雾程度和火焰光线,亦可检测到由各种燃烧生成物、中间物、高温气体、碳氢物质以及无机物质为主体的高温固体微粒,这些模块组件的使用将会为后期设计提供基础。感应系统应尽可能搭载智能化和精准化检测模块,除提供现场环境监测外,还可提供现场语音交互和逃生路线指引。从设计心理学的角度出发,感应系统可帮助消防机器人第一时间掌握火场受害者情形,辅助声光系统则有利于安抚惊慌失措的人群情绪,扮演“救命稻草”角色,提供科学安全的疏散指导方案。
3.2.4减震模块概念设计分析
机器人的减震装置设计,应确保机器人适应坍塌等恶劣地形,在工作运动过程中避免机身倾覆和剧烈晃动。目前市面上的高弹性减震器已经具备体积小、重量轻、易安装、适配行强的特点,基本可以保证车身在不同探测场合的行进稳定性。介于消防机器人的特殊服务环境,为保护其主体部分不受损坏,造型设计中可增设专用保险杠,在发生碰撞时进一步减少核心元件的损害程度。
4全方向移动消防侦查机器人概念设计
基于上述分析,文章提出了基于麦克纳姆轮机构的全方向移动消防侦查机器人概念设计方案:方案机器人以侦查功能为主,其对于不同环境的适应性强,可利用麦克纳姆轮结构和减震系统实现全地形自主通过;机器人搭载前置摄像头和搜索模块,可识别火情和生命痕迹;配备机械臂和供料管,可引导后方高压水枪实施救援。方案展示如图1所示。
方案中,消防机器人各功能模块设定如下:
控制系统模块选择抗高温的单片机作为主体核心,通过控制各个感应装置的信息传达状态确保消防机器人能高效工作。各传感器能准确感应受灾状况并及时反馈给中央控制系统,结合智慧化操作系统,可自主或半自主地给出及时高效的最佳应对选择。
机械臂模块采用连杆机构,制造容易,传递载荷大,并可以实现急回运动。机械臂前端采用齿轮啮合传动,能够有效地保证传动的精确度和足够的力矩。在机器人遇到障碍物难以通过或救助人员受到重物积压时,机械手臂可以精准抓取重物完成工作目标,清除障碍提高救援速度。机械臂两侧配置高压消防水枪,水通过水泵吸入经压缩后流经水管,最后经水枪射出,水枪通过控制出水嘴的流量来控制水的分散大小,实施灭火。机器人的主水枪选用消防专用的多用途水枪,既可以喷射直流射流,又可喷射雾状射流,并可以喷射干冰、干粉等灭火喷雾,几种模式可以互相交换组合使用,机动性好,对火场适应性好。
弹簧减震模块设置于机器人后轮部分,使得其在遇到障碍物或台阶时,可以有效提升稳定性、增强避震效果,以提升其在复杂地形环境下的越障能力。因机器人的底盘位置较低,底盘架采用连杆机构连接前后轮,保证机器人运动灵活,实现全方位移动通过性。
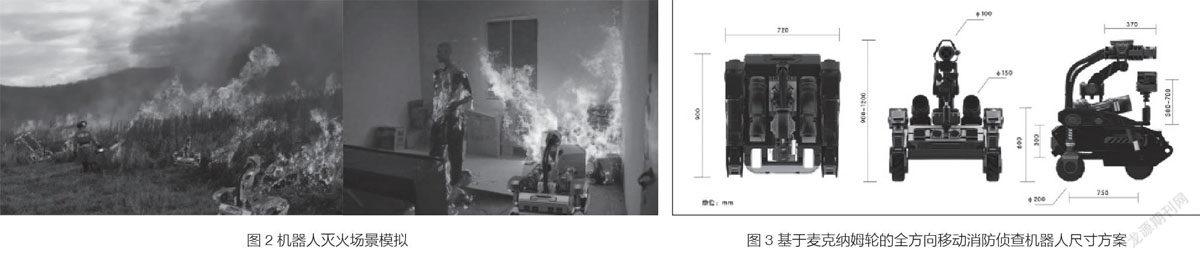
综合来看,理想状态下的消防机器人可匹配智慧化交互模式,实现远程操控和自主行动。其主要操控方式为操作员通过VR眼镜实施观察,利用操作台实施控制:麦克纳姆轮可使机器人进行全方向灵活移动,前LED大灯照明前方道路,便于观察及行进;多传感器实时对火场情况进行测绘,将火场情况、数据信息通过5G传输到控制中心;机器人亦可自主搜寻待救人员,研判火场温度、火焰强度及烟尘情况,可自主选择行进方向并主动避障;如遇障碍物需要暴力破除,可使用上方机械臂配合摄像头观测完成快速拆除;如需救火,其搭载的高压水枪可在指挥台控制下完成精准喷射。部分灭火作业场景模拟如图2所示。
在尺寸设定方面,消防机器人整体长900mm,宽720mm,高900mm—1200mm可伸缩调节。配备的可替换机械臂能够实现水平方向360°旋转垂直方向120°转动,确保消防机器人四周火情能及时控制,工作范围全面。侦查模块位于主体前上方,可实现360°全方位转动与上下50mm范围移动,具备良好的观测视野,确保工作人员在后台对探查范围及时做出反应,如图3所示。机器人可搭载φ150mm直径高压水枪,匹配多种灭火材料以适应不同火场环境。机器人底盘自重约800kg,设计载重为350kg。
材质选择上,因消防机器人一般会在石化场所、煤气泄漏现场或其他火灾状况恶劣的高危环境中工作,需要保障其具备一定防爆能力,该消防机器人的主体材料选用304不锈钢、合金钢板、镀锌管等,防爆强度高且耐腐蚀性强。表面采用喷塑处理,为红加黑磨砂质感,符合消防装备的整体色调。麦克纳姆轮机构采用内嵌凯夫拉纤维材质的优质橡胶,具有良好的柔韧性,更加灵活机动。
产品语意表达方面,此機器人设计以中国红为主色调,黑色作为底色,取名为“碧血丹心”,体现其为消防事业奋斗到底的进取精神。色彩表达中,黑色代表质地坚硬,稳固可靠,并体现高科技感。而红色醒目张扬,饱含热情,匹配传统消防认知,融入人文考量,赋予该机器人明确的功能定位。机器人整体色彩鲜明大气,彰显出现代感和设计感。
5结语
火灾的发生对社会危害巨大,火灾救援亦是对消防系统设备配置、人员素质、政策意识等的重大考验,是对遇险人员和消防官兵人身安全的重大威胁。时下城市建筑结构日益复杂,灭火救援难度增大,随着机器人技术的完善和普及,智能化消防设备发展已成为趋势,将会愈加拥有其实用价值。文章是对智慧化消防设备的设计探讨,旨在探索科技化背景下消防机器人的研发走向和功能特征,力求运用科技成果保障社会财产和人身安全。文中所给出的设计方案还属于概念化探索阶段,仅提供一个可行的设计思路,长期的规划和研发还有很多具体内容有待进一步研讨。
猜你喜欢
军事文摘(2022年19期)2022-10-18
纺织科学研究(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年10期)2021-07-16
印刷工业(2020年4期)2020-10-27
印刷工业(2020年4期)2020-10-27
中国储运(2019年5期)2019-05-15
能源(2018年10期)2018-12-08
中国交通信息化(2017年4期)2017-06-06
中国公路(2017年12期)2017-02-06
