
考虑贮箱液体晃动的复杂航天器分离动力学分析
2022-07-14 12:28刘汉武方贤亮
振动与冲击 2022年13期
刘汉武, 张 华, 方贤亮
(1.上海宇航系统工程研究所,上海 201109;2.上海市空间飞行器机构重点实验室,上海 201108)
为了满足多种任务的需求,大型复杂的航天器通常由多个舱段或多器组成,并且需要完成在轨的多次分离,分离的安全性和可靠性直接影响太空任务的成败。 航天器的分离过程涉及分离速度、姿态等众多动力学设计指标问题,由于地面测试方法的局限性,很难在零重力下模拟航天器的分离过程。 仿真分析已成为一种基本方法和必要手段。 目前,为了在大型复杂航天器的在轨分离动力学分析中实现高精度和高可靠性,均会考虑多参数偏差的影响,如张华等[1]在航天器分离仿真过程中引入了多参数,开展了航天器多参数敏感性分析、多参数叠加的分离极限工况分析、随机打靶分析及分离安全包络分析,分析过程包含了航天器分离仿真的全过程;沈晓凤等[2]考虑了小卫星偏心和加工误差等因素进行了蒙特卡罗分析,开展了弹簧分离机构优化设计;赵刚练等[3]分析了不同分离导轨间隙对分离的影响;卢丽颖等[4]研究了弹簧刚度、弹簧初始压缩量、子星质量、弹簧安装位置偏差和姿态角偏差对分离速度的影响;袁瑞[5]考虑太阳帆板的柔性效应对轨道运动的影响和对姿态运动的影响进行了分析;刘汉武等[6]考虑了太阳翼和分离舱的柔性特性对航天器分离的影响;张华等[7]对两对接飞行器的分离过程和地面模拟试验过程进行了理论分析和仿真研究;朱世权等[8-9]采用计算流体力学和计算结构动力学双向流固耦合方法对空空导弹分离动力学进行了数值模拟,同时还研究了不同攻角下空空导弹与载机分离动力学的影响。美国、俄罗斯、法国等国家也已经开展了大量的发射、分离方面的研究[10-12]。
上述这些研究均忽视了航天器贮箱液体晃动对分离的影响,当航天器携带大量燃料时,在轨分离时为获得一定的分离速度,航天器承受分离装置的载荷一般较大,此时贮箱燃料液体已经超出了小幅晃动的范畴,液体的大幅晃动对航天器分离姿态的影响将不可忽视,于强等[13]基于光滑粒子流体动力学(SPH)基本理论计算出贮箱液体对航天器的晃动力和晃动力矩,对贮箱内液体的大幅晃动进行了研究;岳宝增等[14]使用任意拉格朗日-欧拉(ALE) 有限元方法对球形贮箱中三维液体大幅晃动问题进行了数值模拟;马超等[15]采用绝对节点坐标列式流体单元实现了对流体系统的建模,并首次将绝对节点坐标列式流体单元应用于液体晃动分析;马亮等[16]采用SPH方法研究了球形贮箱带隔板和不带隔板对液体晃动激励频率的影响;周利剑等[17]针对立式储罐不同地震激励和储液比储液晃动进行了研究;张诗琪等[18]利用SPH方法对制动液罐车液体晃动动力学进行了研究。这些研究说明贮箱液体大幅晃动对航天器在轨姿态影响显著,因此要得到精确的航天器分离动力学分析结果,考虑贮箱液体晃动是必不可少的。
本文采用耦合的欧拉-拉格朗日(CEL)方法,建立了航天器和液体燃料的分离耦合动力学模型,通过航天器分离动力学及流固耦合动力学分析,研究了贮箱燃料液体晃动对航天器分离姿态的影响,给出了液体晃动对航天器产生的干扰力和力矩,并研究了不同贮箱剩余量对航天器分离姿态、干扰力和力矩的影响规律。
1 基础理论
1.1 分离动力学理论模型
航天器分离机构主要通过安装在对接框表面上的四个独立推杆来分离主被动航天器,弹簧推杆提供分离动力,并且每个推杆的推力独立地作用于对接框表面上,且沿x(负)方向(见图1)。
图1 分离推杆作用点及坐标系Fig.1 Action point and coordinate system of separating push rod
(1)
式中:Fi是第i根推杆作用的推力;uxi(≤0)是第i根杆的端面在x方向的位移;F0,k分别为分离推杆的预紧力和弹性常数;s0是弹簧推杆的最大伸出长度。分离推杆作用在O点的力和力矩可简化为
(2)

系统总动能
(3)
式中,v为广义速度。
(4)
式中:u、v、w分别为x,y和z方向位移;φ、θ、ψ分别为x,y和z方向角度。
D为包含飞行器质量惯量特性及运动方向角的矩阵
(5)
通过第二类拉格朗日方程
(6)
得到动力学方程

(7)
其中
(8)
(9)
(10)
式中:D为广义质量阵;C为阻尼;P为刚度系数。
1.2 液体晃动基本理论
一般运动容器中的液体振动问题无法得到解析解,只有特定的容器形状和简化假设条件下能够得到解析解。假设一刚性容器,其中含无旋无黏均匀不可压缩流体。液面坐标系定义如图2所示。

图2 液面坐标系定义Fig.2 Definition of liquid level coordinate system
坐标系放在液体非扰动平面,x和y轴在液体表面平面内,z轴垂直于液体表面。无旋流体假设确保在任意单连通区域内存在单值的速度势函数,速度场可以通过取梯度得到
V=∇φ
(11)
式中:V为速度梯度;φ为速度势。
在无旋流体中对于一个质点的牛顿第二运动定律的矢量表达式为
(12)
式中:ρ为质量密度;p为垂直压力强度;FB为体力矢量;A为加速度矢量。注意到这个关系
(13)
上述方程可以重新写成
(14)
其中,假设体力仅由加速度场引起,同时流体的连续性必须遵守。因此,
∇·V=0
(15)
式(14)和(15)是充分的,一旦适当的初始和边界条件给定,就可以唯一的确定速度分量u,v,w和压力p。
把式(11)代入式(15),可以看到φ必须满足拉普拉斯方程
(16)
流体是无旋流体,密度为常数,因此运动方程式(14)先积分然后线性化可以得到伯努利方程
(17)
其中,加速度场已经被指定为重力加速度。φ从式(16)确定及适当的边界条件,式(11)可以求得速度矢量,由式(17)可以求得压力分布。作用于容器上的力和力矩可以由压力的适当积分得到。
2 航天器与液体燃料耦合分离动力学建模
航天器贮箱液体大幅晃动过程是一个复杂的流-固耦合问题,基于网格算法,拉格朗日方法和欧拉方法这两种基本数值方法都不能独立且很好地模拟液体晃动问题, 两种算法都有其自身的优缺点,相对而言,拉格朗日方法可以更好地描述结构运动,而欧拉方法可以更好地处理流体的大变形。 因此,耦合欧拉-拉格朗日方法(CEL)被提了出来,该方法能够结合两种算法优势,分别处理结构和流体,并在接触面上进行耦合计算,可以更好的解决复杂的流-固耦合问题和大变形问题。
航天器和贮箱结构利用拉格朗日方法求解,给定节点位置x=(x,y),节点速度u=(u,v),单元密度ρ,内能e等。单元的质量和拉格朗日形式的动量守恒方程为
m=ρ0V0
(18)
(19)
根据边界条件和耦合作用力得到外力fex,由动量守恒方程得到内力fin,因此,结构运动的控制方程为
(20)
液体燃料采用欧拉单元建模,给定节点位置,单元密度ρ,内能e等,根据边界条件和耦合作用力的外力fex,通过动量守恒方程得到内力,欧拉形式的动量方程可以写成
(21)
根据材料的状态方程和能量方程计算单元的压力、应力和能量得到能量方程为
(22)
式中:x、y为坐标;ρ、v、u、e、p分别为流体介质的密度,径向速度,轴向速度,内能和压力。
航天器在轨分离通过爆炸螺栓解锁后,弹簧力开始作用,使得主被动飞行器分离,分离过程可以看做是一个大范围运动的动力学问题,利用刚体运动学理论可以得到主被动飞行器分离后的姿态,航天器在轨分离示意图如图3所示。
图3 航天器在轨分离示意图Fig.3 On orbit separation diagram of spacecraft
引入贮箱燃料的液体大幅晃动非线性特性,使得航天器分离动力学变得更加复杂,而耦合的欧拉-拉格朗日方法可以有效的解决该问题,航天器主体结构采用拉格朗日网格单元建模,贮箱燃料采用欧拉单元建模,得到含液体晃动的航天器在轨分离耦合动力学模型,如图4所示。
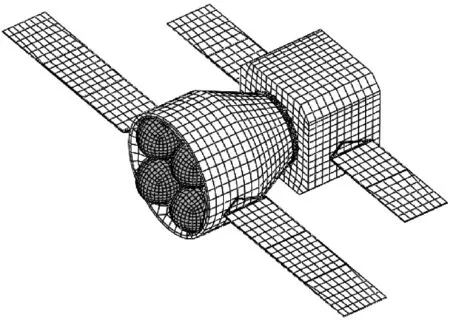
图4 含液体晃动的航天器在轨分离动力学模型Fig.4 Dynamic model of spacecraft separation in orbit with liquid sloshing
3 分离仿真分析
3.1 贮箱液体晃动影响分析
针对含液体晃动的航天器在轨分离耦合动力学模型开展动力学分析,其中分离时贮箱燃料剩余1/3,在分离过程中分离弹簧力变化如图5,航天器开始受到分离弹簧推力,0.23 s后弹簧力作用完成,弹簧力对贮箱液体产生了初始扰动,贮箱燃料液面也由于弹簧力的作用而发生了改变,随后航天器与贮箱液体产生耦合效应,其分离后姿态的变化如图6,贮箱内燃料液面形状变化情况如图7。
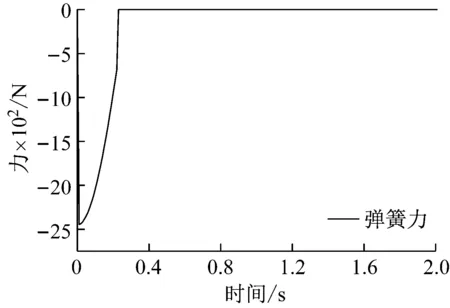
图5 弹簧分离力Fig.5 Spring separation force
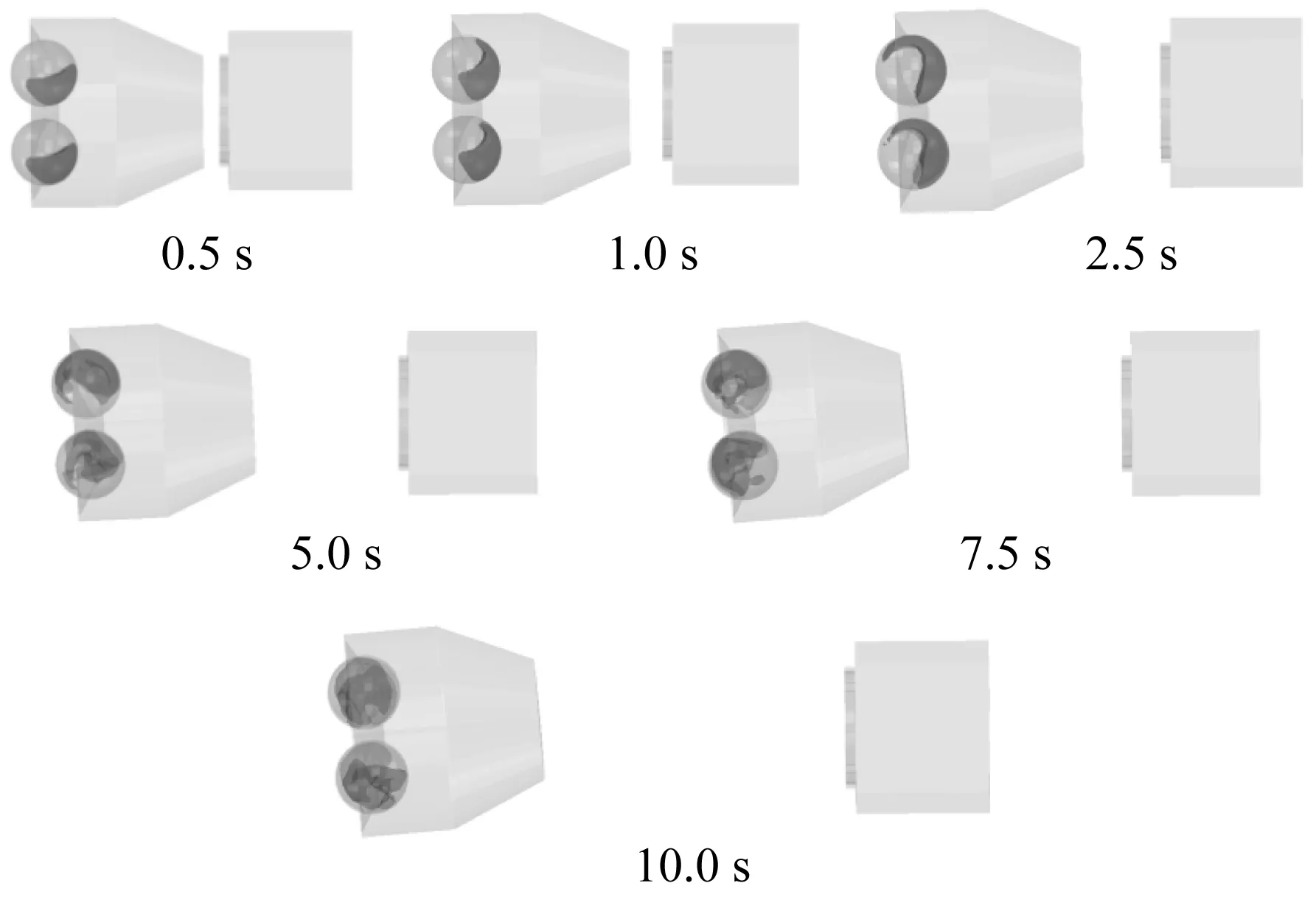
图6 主被动飞行器分离过程姿态Fig.6 Attitude separation of active and passive aircraft
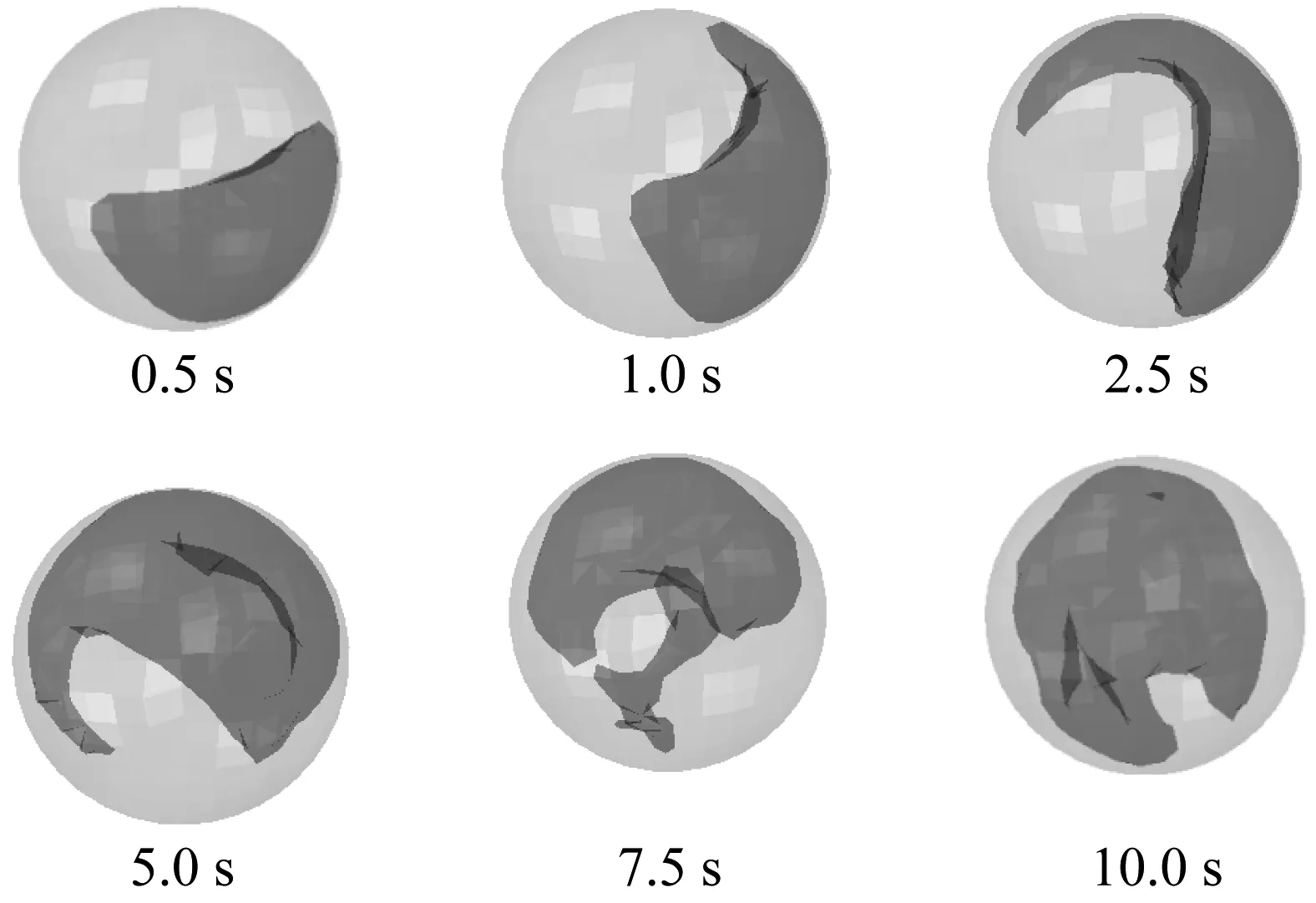
图7 贮箱燃料液面形状Fig.7 Tank fuel level shape
由图6和图7可知,航天器在弹簧力和贮箱液体晃动的耦合作用下,姿态发生了改变,贮箱液体液面在弹簧力的扰动下,引起了大幅的晃动,甚至发生了液面破碎现象,这将使得贮箱液体对航天器的非线性干扰加剧,在控制系统停止控制的这段时间,航天器与贮箱液体将持续耦合作用,航天器姿态的准确预测将极大提高控制系统策略的准确性和可靠性。
为准确预测分离后航天器姿态,同时说明航天器分离引入液体晃动的必要性,分别对贮箱液体刚体假设和液体晃动对航天器分离姿态的影响进行了研究,得到航天器分离后姿态曲线对比如图8、图9。
图8 星体分离速度曲线对比Fig.8 Comparison of star separation velocity curves
图9 星体分离角速度曲线对比Fig.9 Comparison of star separation angular velocity curves
由图8、图9和表1可知,贮箱的液体大幅晃动对航天器分离速度和角速度产生了较大的扰动,呈现较强的非线性特性,考虑贮箱液体晃动的航天器分离速度和分离角速度总体上低于与液体刚体假设结果,这是由于液体刚体假设是一种偏恶劣的极限情况,液体在分离过程中质心不断变化,同时有液体黏性和阻尼的存在,会对航天器姿态改变产生阻力的作用,导致考虑液体晃动的结果偏小。

表1 贮箱液体晃动对航天器分离姿态的影响Tab.1 Influence of liquid sloshing in tank on spacecraft separation attitude
3.2 贮箱液面高度影响分析
航天器在不同时段开展分离对应于贮箱燃料的剩余量不同,不同剩余量燃料的液体晃动对航天器分离产生的扰动是不一致的,故有必要分析贮箱不同液体余量对航天器分离姿态的影响规律,分别进行了1/6、1/3、1/2和2/3的燃料余量含液体晃动的航天器在轨分离耦合动力学分析,分析结果如图10~13所示。
图10 不同液体余量对航天器的分离速度影响Fig.10 Influence of different liquid margin on separation velocity of spacecraft
图11 不同液体余量对航天器的分离角速度影响Fig.11 Influence of different liquid margin on separation angular velocity of spacecraft
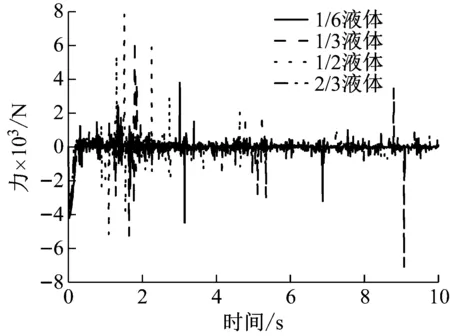
图12 贮箱液体干扰力Fig.12 Interference force of liquid in tank
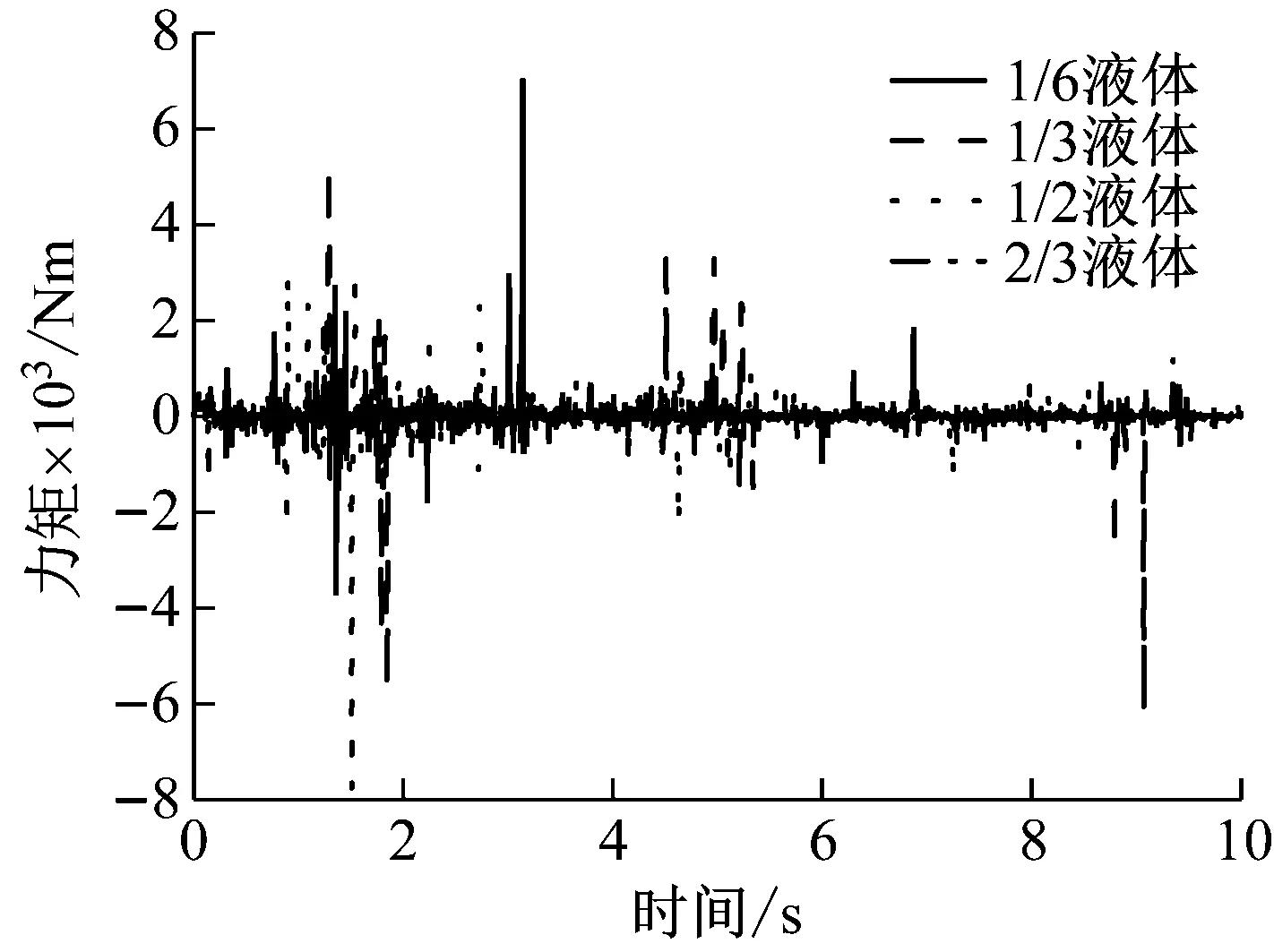
图13 贮箱液体干扰力矩Fig.13 Interference torque of liquid in tank
由图10可知,随着贮箱燃料余量的增加,航天器分离速度越来越小,由于贮箱燃料余量的增加对应航天器的质量增大,从而导致分离速度降低;由图11可知,贮箱燃料余量的不同对航天器分离姿态的影响较为复杂,总体来看,贮箱1/6、2/3液面余量的液体晃动对分离姿态的影响较1/3、1/2液面余量的影响小,较小质量惯量的液体晃动不会对航天器姿态的产生较大影响,同样贮箱燃料余量较多,难以激振起液面的大幅晃动,也不会对航天器姿态产生较大的耦合作用;由图12和图13可知,不同液体余量的液体晃动对航天器的干扰力和干扰力矩影响非线性较大,这是由于贮箱液体晃动在航天器分离过程中属于大幅晃动,具有较强的非线性特性,从而体现在液体和航天器耦合的干扰力和力矩也具有较大的非线性特性。由此看来,航天器贮箱液体晃动为航天器的姿态控制增加了难度,只有使用精确的航天器分离动力学模型,才能编写出有效的控制程序,在航天器分离后快速控制姿态稳定。
4 结 论
引入了航天器贮箱燃料液体晃动特征,建立了航天器和液体燃料的分离动力学模型,开展了航天器分离动力学及流固耦合动力学分析,分析结果表明:
(1) 航天器贮箱燃料液体大幅晃动特征对航天器分离姿态具有显著影响,其液体晃动特征对分离动力学分析是不可忽视的,刚体假设不再适用;
(2) 不同贮箱燃料余量对航天器分离姿态、干扰力和力矩的影响是不同的,1/6、2/3燃料余量的液体晃动对分离姿态的影响较1/3、1/2燃料余量的影响小,较小质量惯量的液体晃动不会对航天器姿态的产生较大影响,同样贮箱燃料余量较多,难以激振起液面的大幅晃动,也不会对航天器姿态产生较大的耦合作用;
完善了航天器在轨分离动力学,提高了航天器在轨分离动力学模型的准确性和可靠性,为航天器在轨分离优化设计提供了数据参考,同时为航天器分离后姿态控制提供支撑,对我国深空探测的重大工程项目开展奠定了技术基础。
猜你喜欢
国际太空(2022年7期)2022-08-16
导弹与航天运载技术(2022年2期)2022-05-09
一重技术(2021年5期)2022-01-18
卫星与网络(2019年5期)2019-12-24
北京航空航天大学学报(2019年9期)2019-10-26
国际太空(2019年9期)2019-10-23
阅读(科学探秘)(2019年4期)2019-06-19
国际太空(2018年12期)2019-01-28
军事文摘·科学少年(2018年9期)2018-10-29
国际太空(2018年9期)2018-10-18
