海洋电磁信号超低噪声同步采集系统设计
2022-07-14 13:32刘兰军周亚涛陈家林强嘉晨
现代电子技术 2022年14期
刘兰军,周亚涛,陈家林,黎 明,强嘉晨,谢 鹏
(1.中国海洋大学 工程学院,山东 青岛 266100;2.山东省海洋智能装备技术工程研究中心,山东 青岛 266100)
0 引言

1 LNS-MEM 系统设计
LNS-MEM系统组成如图1所示。LNS-MEM系统主要由传感器模块、前置放大模块、A/D 采集模块、主控模块组成,可同步采集3 个电场通道信号(E,E,E)、2 个磁场通道信号(H,H)。传感器模块包含电场传感器和磁场传感器,电场传感器采用低噪声不极化Ag/AgCl 电极,磁场传感器采用低噪声感应式磁场传感器(内置低噪声放大电路)。前置放大模块包括电场信号前置放大和磁场信号前置放大。因采用的磁场传感器已经内置低噪声放大电路,故磁场信号前置放大只是一个低噪声阻抗匹配放大电路;电场信号前置放大是LNS-MEM 系统的设计重点。电场信号是一个低频微弱信号,电场前置放大采用超低噪声斩波放大原理设计。A/D 采集模块负责将放大后的电场、磁场模拟信号同步转换为数字信号,采用低噪声高精度A/D 转换器实现。主控模块采用“低功耗ARM+FPGA”的设计方案,具体包含低功耗ARM 控制器、FPGA、高精度时钟、数据存储和通信控制接口。低功耗ARM 控制器负责系统任务管理,FPGA 负责多通道信号同步采集控制,高精度时钟为系统提供高精度时钟信号,通信控制接口实现系统配置、GPS 授时和数据读取等功能。
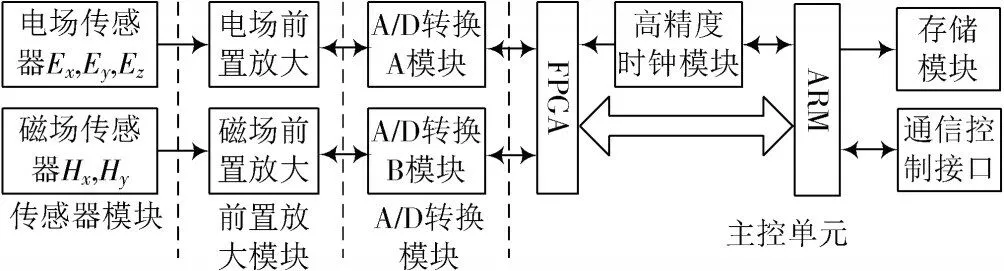
图1 LNS-MEM 系统组成
2 LNS-MEM 系统关键模块设计
2.1 低频微弱电场信号超低噪声放大电路设计


图2 低频微弱电场信号超低噪声斩波放大电路系统组成
超低噪声斩波放大电路的本底噪声主要包括电阻热噪声、放大器电路噪声和电阻接触噪声等。电阻接触噪声与电阻材料工艺相关,理论计算时暂不考虑。电阻热噪声的计算公式为:

式中:为玻尔兹曼常量(1.38×10J/K);为绝对温度(取=300 K);为电阻值(单位为Ω);为带宽(单位为Hz)。
电路噪声分析时,式(1)中的带宽为等效噪声带宽B=。其中,为超低噪声斩波放大通道的上限截止频率,=100 Hz;为噪声带宽系数,取=1.57。根据式(1)的电阻热噪声计算公式可得:

放大器电路噪声主要包括输入端电阻热噪声、反馈电阻热噪声、运放的输入噪声电压、运放输入噪声电流流过放大器之前部分电阻和反馈电阻产生的噪声。
本文设计的低噪声斩波放大电路的原理图如图3所示。

图3 超低噪声斩波放大电路原理图
超低噪声斩波放大电路的各单元分析如下:
调制单元,桥式开关电路单个场效应管的导通电阻为3 Ω,因此,调制单元可以等效成阻值为6 Ω 的电阻,其电阻热噪声为。

解调单元,由于初级放大增益较大,运算放大器的电路噪声忽略不计。输入端电阻=56.2 kΩ,其电阻热噪声为;反馈电阻==56.2 kΩ,其电阻热噪声为。
低通滤波,=15.6 kΩ,其电阻热噪声为;=233 kΩ,其电阻热噪声为。
次级放大,运算放大器的电路噪声忽略不计,无电阻热噪声。

超低噪声斩波放大电路的输入端换算本底噪声密度的计算公式为:

式中:为噪声电压幅值;B为等效带宽(B=157 Hz);为电路单元对应输入端的放大增益。根据式(3),计算得到的各电路单元对应的输入端换算本底噪声密度,如表1 所示。
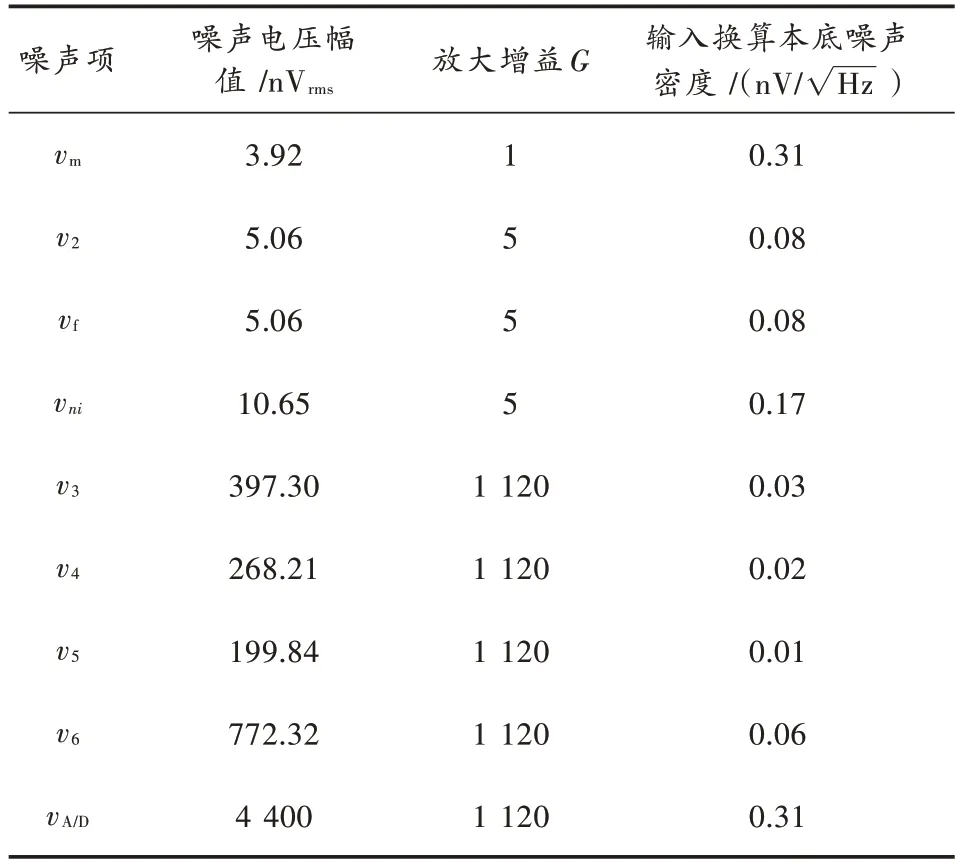
表1 各电路单元的噪声分析结果


2.2 高精度分布式时钟同步方法设计
海洋电磁探测的电磁数据处理,需要电磁探测阵列中的各个电磁采集系统具有高精度的时钟同步。针对电磁采集系统的高精度分布式同步需求,本文设计采用“GPS 授时+高精度温度补偿时钟”的时钟同步方案。LNS-MEM 投放前,利用GPS 进行授时,保证各个采集系统启动时刻精准;LNS-MEM 投放后,基于高精度温度补偿时钟模块进行高精度的时钟走时;LNS-MEM 回收后,再利用GPS 进行校时,获得各个采集系统的走时偏差。
为了保证LNS-MEM 系统授时/校时的准确性,设计了基于双秒脉冲的GPS 授时/校时方法,具体授时/校时流程如图4 所示。授时/校时装置收到命令后,等GPS 秒脉冲信号上升沿时,向LNS-MEM 系统发出授时/校时请求,并将时钟信息发送给LNS-MEM 系统,LNS-MEM 系统完成系统时钟信息更新(授时)或时钟信息记录(校时);在下一个秒脉冲信号上升沿时,若授时,LNS-MEM系统启动系统实时时钟RTC 开始走时,若校时,记录RTC 的当前时钟信息。
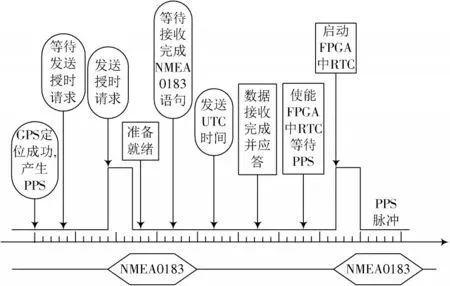
图4 基于双秒脉冲的GPS 授时/校时流程
为了保证LNS-MEM 投放后的高精度时钟同步,设计了基于精度为50 ppb 的低功耗温度补偿型压控晶振的高精度时钟模块,高精度时钟模块组成如图5 所示。ARM 通过A/D 采样获得压控晶振的工作环境温度测量值(A/D 值);根据标定的A/D 值与D/A 值(压控输入值)对应关系表,ARM 控制D/A 产生对应的压控输入值,调整温度补偿型压控晶振的时钟输出信号以提高其时钟精度。
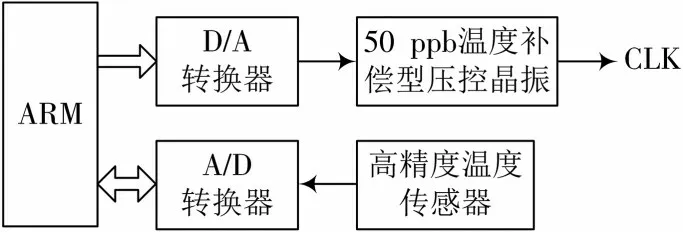
图5 高精度时钟模块
3 LNS-MEM 系统测试结果与分析
基于实验室环境和海洋环境,开展了LNS-MEM 系统性能测试。实验室环境测试场景如图6 所示,测试了LNS-MEM 系统的电场通道本底噪声、电场通道带宽、时钟同步等性能。实验室测试系统主要包括LNS-MEM 系统、锁相放大器、授时/校时装置、PC 监控软件。其中锁相放大器用于电场通道带宽测试;授时/校时装置用于LNS-MEM 系统的授时/校时;PC 监控软件用于系统参数配置和实时波形监控。海洋环境测试场景如图7 所示,主要测试了LNS-MEM 系统在海洋可控源电磁(CSEM)勘探作业中的数据采集性能。
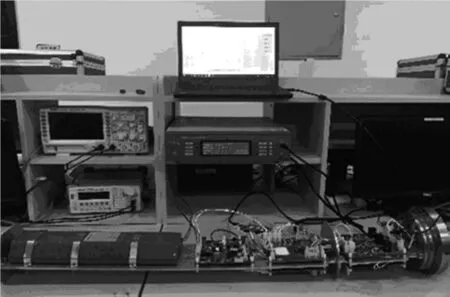
图6 实验室环境测试场景
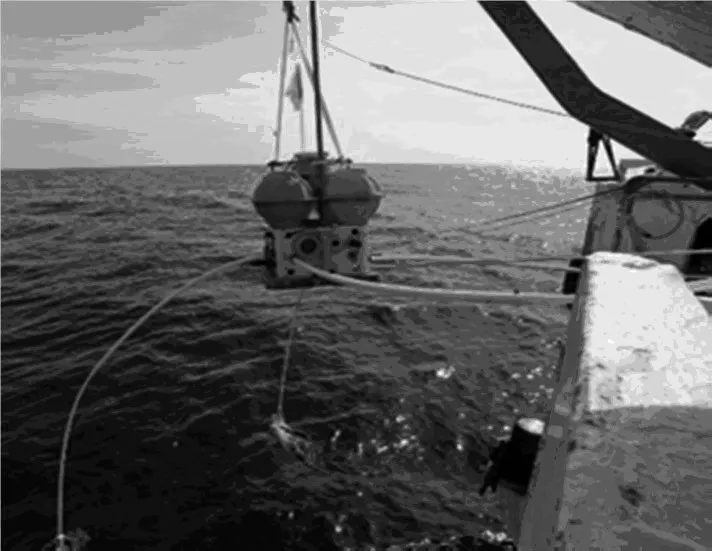
图7 海洋环境测试场景
3.1 电场通道本底噪声

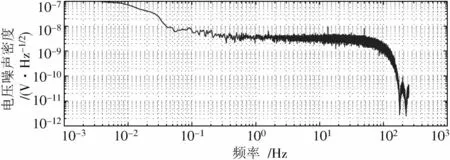
图8 电场通道本底噪声测试结果
3.2 电场通道带宽
基于锁相放大器MODEL 7265 开展了LNS-MEM 系统电场通道的幅频特性测试,以获得电场通道带宽。LNS-MEM 系统采用锂电池组供电,将电场前置放大电路输入端连接MODEL 7265 的信号输出端,电场前置放大电路输出端连接MODEL 7265 的信号输入端;MODEL 7265 依次输出幅值为1 mV、频率范围为0.001~100 Hz 的信号;通过MODEL 7265 测量电场前置放大电路的输出信号幅值;根据信号幅值计算对应频点的增益,获得LNS-MEM 系统电场通道的幅频特性。
测得的LNS-MEM 系统电场通道的幅频特性如图9所示。测试结果可以看出,电场前置放大通道为一个低通滤波通道,通带增益为61 dB,-3 dB 上限截止频率约为100 Hz。
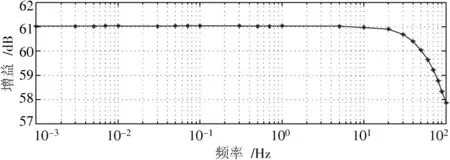
图9 电场通道幅频特性测试结果
3.3 时钟同步
时钟同步测试的过程为:首先通过携带GPS 模块的授时/校时装置对LNS-MEM 系统进行授时,授时之后LNS-MEM 系统连续工作一段时间,最后通过携带GPS模块的授时/校时装置对LNS-MEM 系统进行校时。反复开展多次测试,将测试结果平均得到系统的时钟同步偏差。连续测量3次的LNS-MEM系统时钟同步偏差测试结果如表2所示。由表2可以得出,LNS-MEM系统平均日时钟同步偏差为1.485 ms,时钟同步精度约为17 ppb。
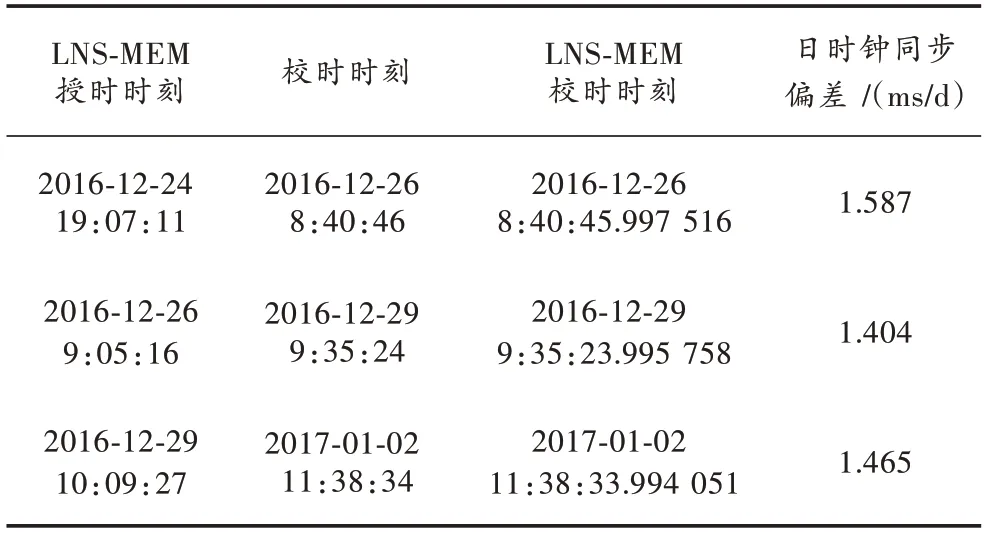
表2 系统时钟同步误差测试结果
3.4 海洋环境测试
为了进一步测试LNS-MEM 系统在实际海洋环境中的数据采集性能,利用研制的LNS-MEM 系统在中国南海某海域开展海洋可控源电磁(CSEM)勘探海上试验。试验中电磁发射源的发射电极极距为150 m,发射电流为725 A,发射源离地高度为70 m。图10 所示是LNSMEM 系统采集的CSEM 时间序列数据。由图10 可知,系统采集到了有效的CSEM 数据。
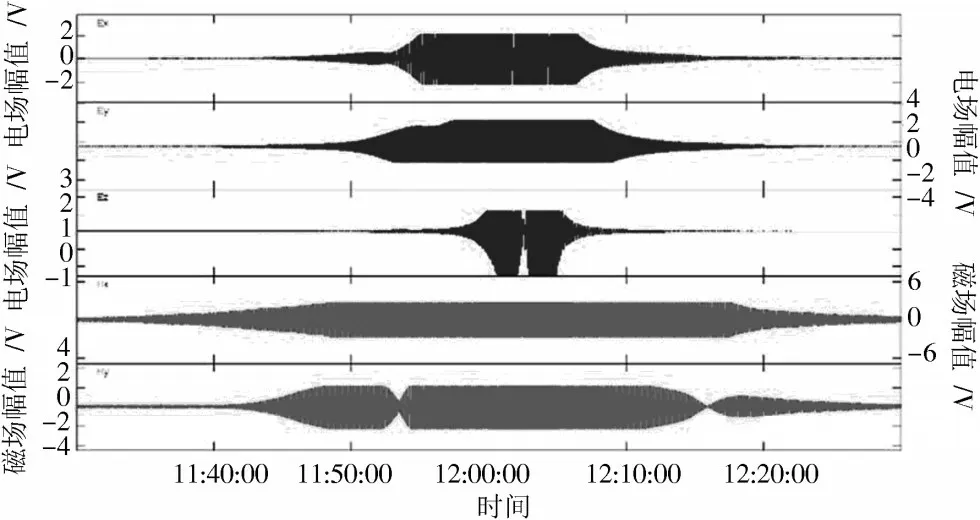
图10 采集的CSEM 时间序列数据
对LNS-MEM 系统电场通道Ex 采集的电磁数据进行时频分析,得到如图11 所示的时频分析结果。从图中可以看出,电场通道采集到了电磁发射源经过LNSMEM 系统时的CSEM 数据。
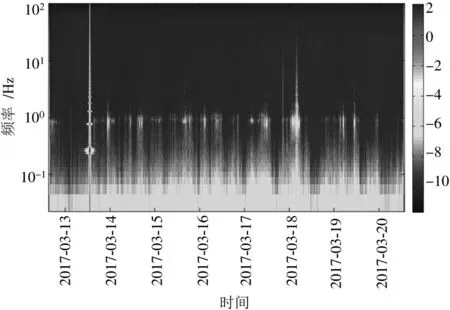
图11 电场通道Ex 的数据时频分析结果
选取电磁发射源经过LNS-MEM 系统上方的时刻附近时长为3 min 的数据处理,得到海洋CSEM 探测的MVO 曲线和PVO 曲线,如图12 所示。
从图12 中可以看出,研制的LNS-MEM 系统的有效探测范围可达7.5 km,可以满足海洋电磁探测的需求。
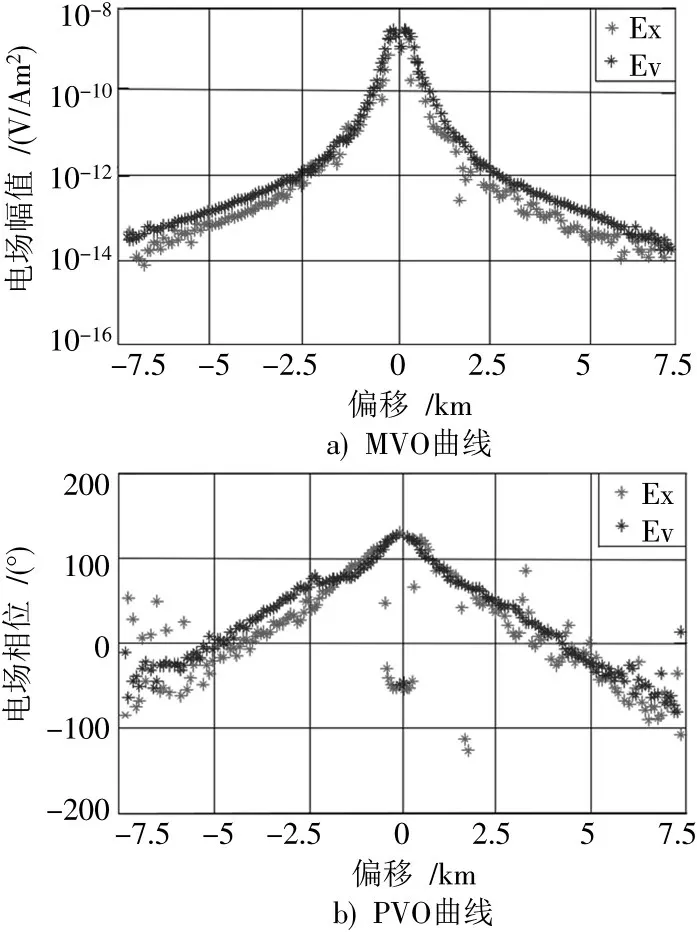
图12 海洋CSEM 探测的MVO 曲线和PVO 曲线
4 结论
海洋微弱电磁信号采集技术是海洋电磁探测的关键核心技术之一。本文针对海洋电磁采集系统的低频超低噪声信号采集和高精度时钟同步需求,设计了一种海洋电磁信号超低噪声同步采集系统LNS-MEM。系统主控采用“低功耗ARM+FPGA”方案,低功耗ARM 负责系统任务管理,FPGA 实现多通道信号同步采集。

猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
北京航空航天大学学报(2017年9期)2017-12-18
数学大王·中高年级(2017年2期)2017-02-08
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
学苑创造·A版(2016年4期)2016-04-16
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年3期)2016-03-26