
车载激光扫描在铁路复测中应用研究*
2022-07-13 09:04张邵华
中国科技纵横 2022年11期
张邵华
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
0.引言
截至2021年底,全国铁路营业里程突破15万km,其中高铁超过4万km。一大批新建高速铁路、城市地铁、重载铁路、高寒(原)铁路等投入运营,需要投入大量人力物力开展病害调查、变形监测、应力测试等,以有效检测病害信息、开展维护保养并确保运输安全。
传统铁路测量工作主要借助全站仪、水准仪、GPS,用于施工测量、超欠挖检测、竣工测量及隧道变形监测等,但具有测量手段功能单一、人工测量工作繁杂效率低、观测时段受限等缺点,不能满足当今高效率的隧道工程施工和高密度的铁路运营维护工作要求[1-3]。相对于传统的散点式测量方式,三维激光扫描技术实现面立体交叉的空间测量模式,并且其外业采集方式为非接触式,可快速全面地获取铁路状态表征信息,使测量方式更加高效可靠,有助于保障测量人员的作业安全,满足铁路大规模运营、建设、规划形势下铁路施工质量和安全运营的高效、经济的技术保证要求[4-5]。
移动测量系统主要由高精度三维激光传感器模块、高精度激光惯导模块、定位导航模块、高清全景影像模块、同步控制模块、电源模块、嵌入式计算机等硬件构成。通过系统集成控制各模块协同工作,共同完成移动测量系统三维地理采集工作[6]。
1.车载移动扫描系统模块
本单位自主搭载集成的铁路移动三维激光扫描系统共分为4个主要单元,如图1所示。

图1 移动扫描系统模块构成
(1)电源与管理模块:对整套系统进行供电及相应的电路保护,从而保证系统的正常工作。
(2)控制与存储模块:通过电路控制将所有传感器进行同步数据采集,并将采集到的相关数据上传至存储系统中。
(3)数据采集传感器:利用各种传感器,获取物体的各种相关信息,主要包括点云数据、全景影像、空间位置和姿态信息等。
(4)数据采集与融合SDK(含IE软件):包括激光数据、全景图像采集以及GNSS/IMU/DMI数据采集SDK,以及针对采集原始数据进行融合SDK模块。
通过内同步机制,同步采集三维激光扫描数据、全景影像数据、GPS/IMU/DMI原始数据,并进行严格的时间同步和空间同步处理,完成多源数据融合,获得带绝对坐标的高精度点云数据和影像轨迹数据,用于铁路高精度工程测绘作业。
移动测量多源数据融合主要指三维激光扫描的原始点信息经POS系统获取的定位定向参数转换获得三维空间点云的过程。POS系统获取的定位定向数据,主要包含移动测量系统载体上的流动站GNSS数据、IMU惯性测量单元获取的原始三轴加计和陀螺仪数据、DMI里程编码器模块获取的里程累计辅助信息数据以及GNSS基站获取的基准站GNSS数据。POS系统获取的原始定位定向数据,经后差分紧耦合解算(GNSS弱信号段采用航位推算算法)获得POS系统定位定向数据(即POS定位信息及姿态信息),如图2所示。
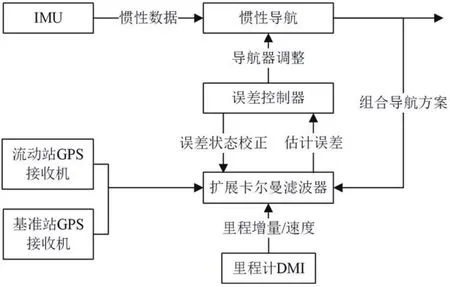
图2 GPS/IMU紧耦合结构及信息流程图
但在峡谷、隧道及树木遮挡区,由于GNSS信号的遮挡等,会导致组合导航定位精度下降,为了保证最终测量的精度,需要在行车轨迹上布置靶标控制网。基于铁路控制网坐标约束进行组合导航系统误差修正,在GNSS信号不良区域采用IMU/DMI为主的航位推算进行定位定姿解算,根据误差传播规律引入控制点坐标进行联合解算,修正定位定姿误差,以提高三维点云的精度[7-8]。
2.铁路复测要素提取
将移动扫描系统集成模块搭载于可乘坐两人的轨道小车上,时速可达到20km/h,以西部某铁路提质改造项目为例,现场数据采集示意图如图3所示,基于铁路移动扫描系统可采集获得铁路场景的三维点云及影像信息。在对多源数据融合处理,获得高精度的三维点云后,可根据点云信息进行线路测量,主要包括里程测量、中线测量、路基横断面测量、隧道横断面测量、站场测量、线路复测要素提取、曲线整正计算、地形图更新测量等内容[9-10]。

图3 现场数据采集示意图
2.1 精度验证
利用铁路沿线布设的高精度CPIII控制网标靶,进行POS优化,对靶标纠正前后的三维点云精度进行统计,结果如表1所示,在靶标纠正前,平面平均精度7.9cm,高程5.1cm;点云经靶标纠正后,点云平面平均精度1.8cm,高程1.1cm,满足了铁路复测中精度要求。
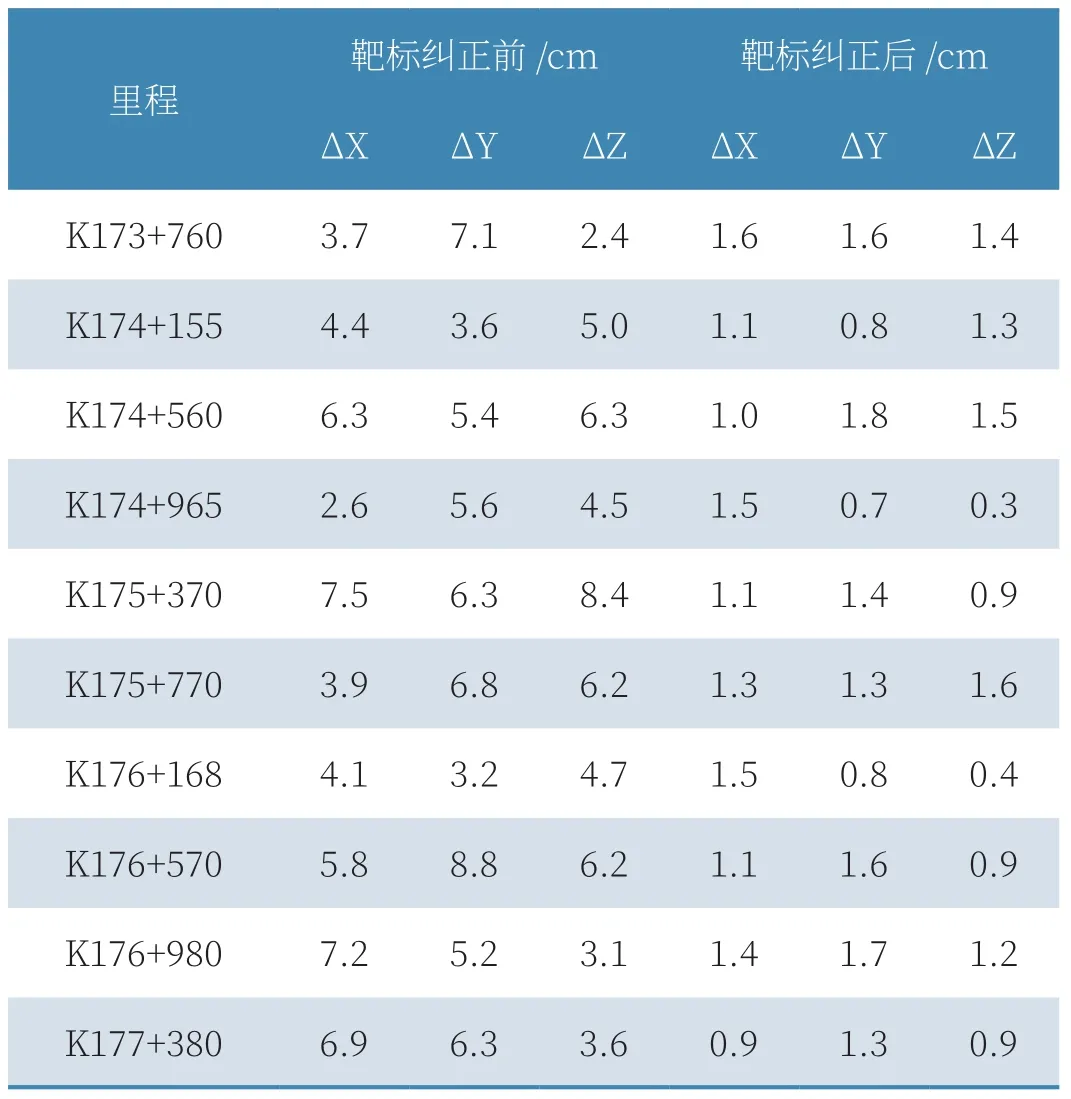
表1 靶标纠正前后三维点云精度
2.2 轨道中心线提取
利用车载激光雷达扫描系统融合生成的POS位置姿态信息数据,结合设备自身标定好的结构信息参数通过算法自动分类出轨道面点云。利用分类的轨面激光点云,构建任意里程处横断面轨面中心坐标系,将该轨面坐标系下轨顶处点云按平面3cm,高程3cm空间进行滤波处理,最终得到任意断面轨顶点数据。根据模板匹配提取轨顶中心,并制定间距对轨顶点数据进行拟合,形成最终的精确轨面线,完成轨道中心线的自动化提取,如图4所示。
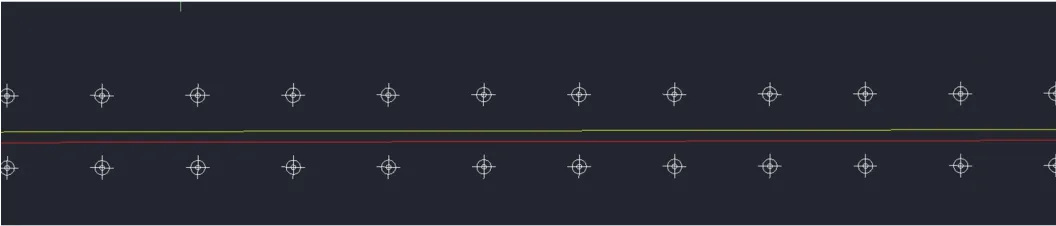
图4 中心线提取示意图
2.3 路基断面提取
横断面图是线路维修、技术改造时的设计、施工的重要依据。在既有线百米标、地形变化处的加标、挡土墙、护坡、路基病害处、平交道口、隧道洞口、涵管中心及桥台等处均应测绘横断面图。测绘横断面时在轨顶、砟脚、砟肩、路肩、侧沟、平台和围墙等处均应测点。传统的既有铁路主要依靠人工方式进行测量,这种测量方法对既有线干扰大,作业危险系数低。采用车载激光雷达技术获取到既有线数据后,相当于获取了既有线上的全息信息,采用道格拉斯-皮克法算法,即完成横断面的提取,如图5所示。

图5 路基断面提取示意图
2.4 隧道断面提取
随着运营线路的老龄化以及周边建筑、土体等挤压导致隧道出现不同程度的变形,对隧道横断面进行提取,分析隧道结构、变形、接触网、限界、超欠挖、衬砌厚度、拱顶下沉等测量成果,作为铁路隧道建设红线和风险管理的重要信息,可为施工期的质量安全和运营期的维护提供决策辅助。对隧道横断面的提取,常采用等间隔断面、指定里程断面或指定坐标3种方式提取,根据点云四叉树、K-D树等快速搜索算法定位到断面范围内的点云,由指定的断面间距、断面厚度、角度间隔等完成三维断面的提取,如图6所示。
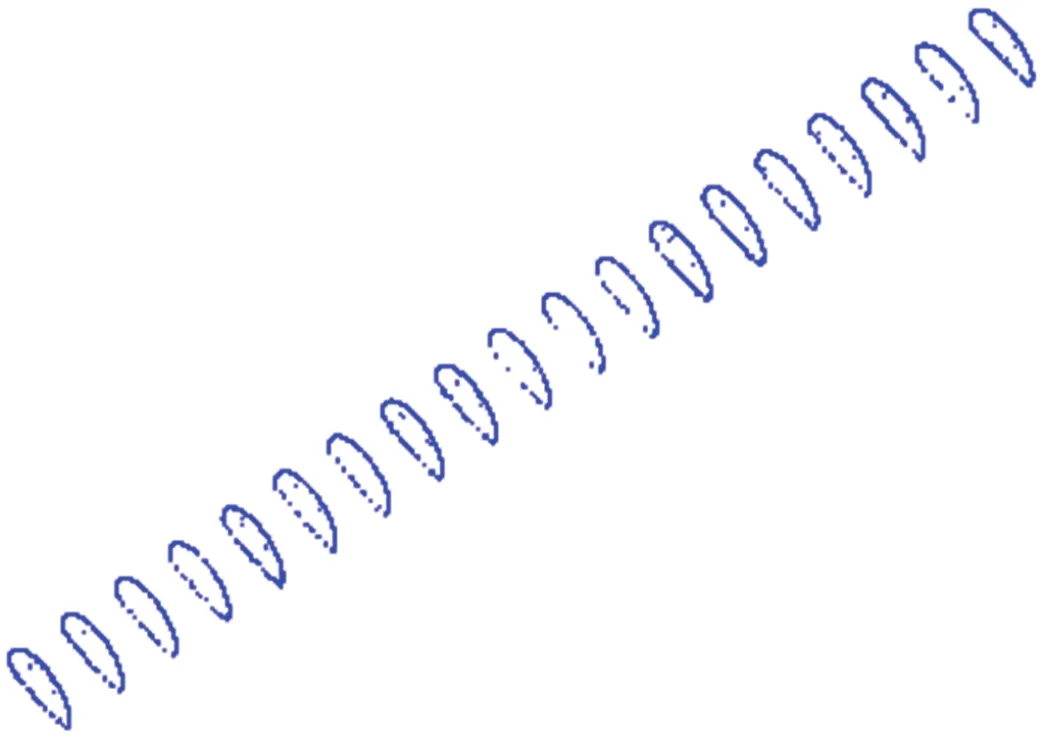
图6 隧道断面提取示意图
3.结语
本文提出了基于移动三维激光技术的铁路复测方法,并通过在铁路轨道车上架设高精度移动三维激光扫描系统对铁路进行连续扫描,实现铁路全断面数据采集,获取的三维点云及数码影像成果真实记录了现场铁路状况以及公务设备情况;研究了融合GNSS、IMU和DMI的多源信息动态定位和定姿方法,达到检测载体厘米级绝对定位精度;完成了基于激光点云进行轨道几何要素的自动提取,实现了轨道中心线、轨道轨顶点、路基横断面、隧道断面数据的快速提取与成图;减少了外业人工数据,提高了整体作业效率,为线路维护、提速改造等提供了可靠数据支撑。
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
昆明医科大学学报(2021年6期)2021-07-31
工程建设与设计(2021年11期)2021-07-28
科学(2020年5期)2020-11-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
中华老年口腔医学杂志(2016年6期)2017-01-15
中国感染控制杂志(2015年7期)2015-12-13
电力自动化设备(2015年4期)2015-09-28
中国当代医药(2015年17期)2015-03-01
发明与创新(2015年30期)2015-02-27
