基于数字孪生的机器人焊接自动编程关键技术研究
2022-07-12 06:42:44张本顺孙凯许燕玲张华军
金属加工(热加工) 2022年6期
张本顺,孙凯,许燕玲,张华军
1.哈尔滨工程大学 黑龙江哈尔滨 150001
2.江苏自动化研究所 江苏连云港 222006
3.上海交通大学材料学院上海市激光制造与材料改性重点实验室 上海 200240
1 序言
机器人焊接因其质量稳定、效率高、重复性好和柔性强的优势而越来越多地被应用在智能制造领域,例如,汽车行业中机器人焊接应用占比约40%。然而在海工装备制造中,传统的示教-再现型机器人却很难大规模直接应用于实际焊接生产中,其应用不足2%。主要是因为在船舶海工焊接制造中存在着大量定制化非标件,加上多品种、小批量的特点(见图1),导致机器人不能应用或者不适用,效率低下,迫切需要机器人焊接具有更高的适应性和柔性。因此,要实现机器人智能化焊接在船舶、海工、钢结构和工程机械中的大规模应用推广,还有很多亟需解决的重要问题[1,2],其中机器人焊接自动编程技术是关键[3,4]。
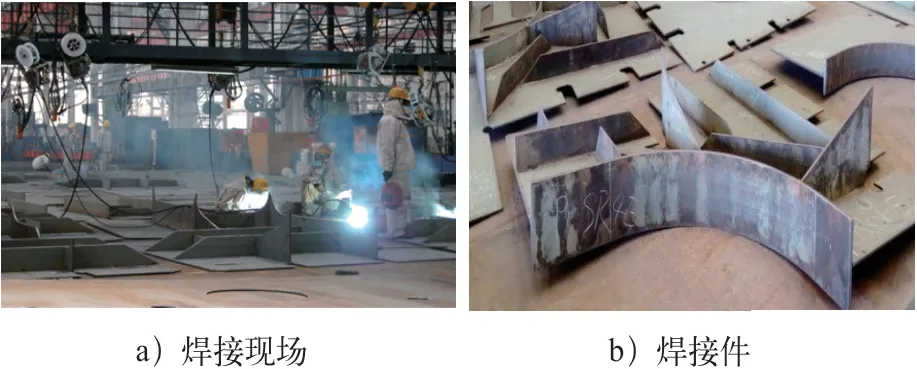
图1 船舶海工装备制造中的多品种、小批量、定制化非标件
2 关键技术
要在多品种、小批量、定制化非标件的船舶海工装备制造中实现大规模使用机器人焊接,需要突破的关键技术如图2所示,包括焊接自动编程技术、机器人焊接控形与控性技术和视觉传感系统等。

图2 基于数字孪生及视觉传感的海工装备机器人智能化焊接关键技术
机器人智能化焊接解决方案如图3所示,其中机器人焊接自动编程是关键,主要包括焊接数字孪生、离线编程、3D视觉等关键技术。利用数字孪生系统快速自动编程,再利用3D视觉自动修正焊接轨迹,可提高焊接效率,实现多品种、小批量、定制化非标件的机器人焊接,解决机器人智能化焊接在船舶海工装备应用中的一些痛点和难点问题,逐步实现智能焊接替代人工,让机器人焊接在这些领域能用、好用。

图3 机器人智能化焊接解决方案
3 机器人焊接自动编程
目前,市场上关于焊接的自动编程软件有很多,如以色列的S m a r t T C P、A B B机器人的RobotStudio、KUKA机器人的Simpro编程软件、发那科机器人的Roboguide、荷兰的RinasWeld、澳大利亚卧龙岗大学的Verbotics及荷兰的Delfoi 机器人离线编程软件等。机器人焊接自动编程流程如图4所示,其实现主要包括以下4步。

图4 机器人焊接自动编程流程
第一步,模型导入与焊缝编辑。从三维设计软件里导出焊接工件三维模型,利用数字孪生系统对焊接工件模型进行编辑,设置焊缝,生成坡口并设置焊道焊接顺序。
第二步,运动仿真与焊接仿真。在数字孪生系统中编辑机器人焊接动作,进行运动仿真,确认加工路径正确、没有碰撞,并生成机器人焊接路径。
第三步,3D焊接轨迹校正。修正机器人实际焊接路径,利用3D视觉扫描整个工件,对工件进行识别和空间定位,并校正三维零件模型和实际工件焊缝位置,获得实际焊缝位置数据。
第四步,焊接过程控制。机器人根据焊接指令运动到焊缝起始位置开始焊接,并利用激光视觉传感对焊接过程进行实时焊缝跟踪控制,利用被动视觉传感系统对熔池进行实时监控,最终完成工件的整个焊接。
4 焊接数字孪生系统
“数字孪生”作为一种“改变游戏规则”的颠覆性技术,是传统行业数字化转型的重要驱动力量,可以实现物理空间与数字空间实时双向同步映射及虚实交互,在虚拟信息空间构建一个机器人焊接动态过程的虚拟系统,基于多传感技术在虚拟空间中完成实物的精准映射,实现对机器人焊接成形过程进行动态协同优化控制,是实现机器人智能化焊接技术新的突破点。研究基于工业数字孪生驱动的机器人智能化焊接技术对机器人智能再制造技术的推广具有重大意义。机器人焊接数字孪生的数字系统与实物系统如图5所示。
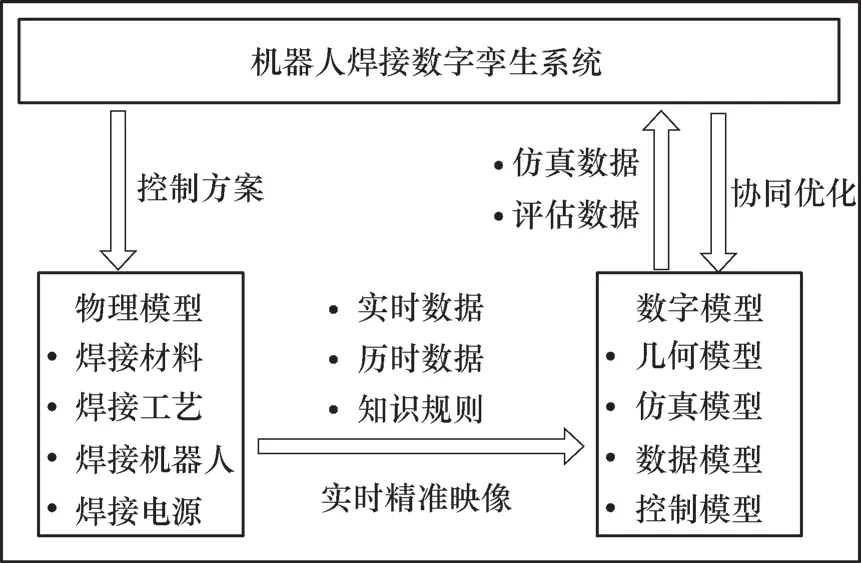
图5 机器人焊接数字孪生系统的数字系统与实物系统
数字孪生是数字世界和物理世界深度融合的共生体,是智能制造应用落地的一个重要手段,具备开放和动态制造场景的识别与适应能力,对制造过程的实时感知与控制能力,以及实现系统的虚实交互与控制优化,是下一代智能制造的关键[5]。
焊接发展历史悠久,焊接过程复杂多变,尤其是船舶海工装备焊接件品种多、批量小、定制化非标件多,装配间隙不一致,以及工艺优化滞后等,阻碍了机器人智能化焊接的发展。基于数字孪生系统的机器人智能化焊接采用离线编程方法,允许终端用户以直观、快速的方式对机器人进行编程,工人能够自动配置焊接参数和编程机器人,生成机器人轨迹并将其自动发送到机器人系统,而无需使用机器人示教器,通过实时控制命令主动将机器人焊接过程保持在界限内。基于数字孪生系统,实现虚实数据交互融合,使焊接生产线物理实体与其数字孪生体实时联动并相互映射,对机器人焊接生产过程进行实时反馈、迭代优化、监督报警等,为焊接过程提供决策建议,从而保证机器人焊接质量的稳定性。
目前,基于数字孪生技术的建模和仿真与以往大不相同,不再是处于离线、独立和特定阶段存在的状态,而是已经实现了与真实的物理世界建立持久、实时、可交互的连接。在焊接中,数字孪生模型和机器人焊接装备实物是相互影响的,是机器人智能化焊接的关键技术。上海柏楚电子科技股份有限公司开发的焊接数字孪生系统建模及仿真软件如图6所示。

图6 焊接数字孪生系统建模及仿真软件
5 视觉传感技术
视觉传感器以非接触特性、信息丰富、精度高、检测速度快及适应性强等优点[6],在数字孪生系统中发挥着重要作用,是修正焊接轨迹、实现焊接自动编程的关键,被广泛用于机器人焊接定位、焊接导引、焊缝跟踪和焊接过程监控中。基于3D视觉的机器人智能化焊接数字孪生系统如图7所示。其中常用的3D视觉厂家有西安知象光电科技有限公司、中科融合感知智能研究院有限公司、浙江汉振智能技术有限公司等。

图7 基于3D视觉的机器人智能化焊接数字孪生系统
在数字孪生系统中,数字世界和物理世界的准确协调联动是关键,利用3D宏观视觉技术,对工件整体形貌进行扫描,与工件模型进行比对后,可自动调节工件在数字孪生系统内的位置,并且由系统再次计算修正焊接轨迹及空移轨迹,以及通过点云配准对工件进行初定位[7](见图8),实现机器人的自动编程焊接。

图8 基于3D视觉的焊接工件路径修正及点云配准初定位
6 结束语
在船舶、海工、钢结构和工程机械等焊接制造中存在着大量定制化非标件,传统的示教-再现型机器人很难直接应用于这些领域的实际焊接生产中。基于数字孪生及视觉传感技术的机器人焊接自动编程是实现智能化焊接在多品种、小批量、定制化非标件领域应用的关键所在。因此,开展焊接数字孪生、离线编程、3D视觉焊接路径修正和焊接定位等关键技术的研究,对于提升我国装备制造焊接水平、提高船舶海工制造工程的自主配套能力,以及满足国家新型船舶战略安全需求均具有重要意义。
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:12
少先队活动(2021年2期)2021-03-29 05:41:04
汽车维修与保养(2021年8期)2021-02-16 00:28:30
学生天地(2020年17期)2020-08-25 09:28:48
数学大王·低年级(2020年3期)2020-03-12 04:48:48
制造技术与机床(2019年7期)2019-07-22 03:42:06
现代机械(2018年1期)2018-04-17 07:29:48
电镀与环保(2017年6期)2018-01-30 08:33:31
焊接(2015年9期)2015-07-18 11:03:52
中国工程咨询(2015年3期)2015-02-14 03:28:28