具有颜色识别功能的机器人设计与探究
2022-07-11 10:23张洪伟
中国设备工程 2022年13期
张洪伟
(南京师范大学附属中学树人学校,江苏 南京 210001)
机器人主要由机械系统、传感系统以及控制系统三部分构成,设计过程涉及到的知识理论体系涵盖人工智能、传感检测以及机械控制理论等多个层次。随着科技的进步和需求的多样化,机器人的概念和功能变得更为宽泛,具备颜色识别功能的机器人得到了大力的推广和应用,其在应用的过程中视觉技术是关键,通过传感器来实现对周边环境的感知,进而完成智能的定位和路径规划。
1 机器人系统的组成
机器人的基本构成主要为机械、传感以及控制三大部分,这三大部分当中包含有6个子系统,其中,驱动系统和机械系统是机械部分的主要构成;人机交互系统和控制系统是控制部分的主要构成;而感知系统和机器人环境交互系统是传感部分的主要构成。这6个子系统在机器人工作的过程中相互影响、相互促进,通过协同合作实现任务的完成。

图1 机器人系统工作流程示意图
如今机器人的使用逐渐朝向智能化和定向化的方向发展,智能化的应用在于劳动力的解放、在于商业价值的创造,而定向化在于与实际应用的紧密联系,通过特定程序的设定来促使目标的实现。但无论在哪一个方向的应用,实现需求的重点皆在于多传感器、多识别器、多控制器以及先进的控制算法和复杂的机电系统的设计和使用。
2 具有颜色识别功能机器人的设计原理
机器人整个视觉系统的建立以信息获取、信息转换、分析处理、输出显示、指令完成程序的执行来完成工作的处理,其中信息获取是第一步也是关键的一步,该过程通过对颜色、形状等信息的获取来进行环境目标的识别,该过程主要通过摄像头实现,在摄像头获得相应的色彩图像之后通过计算机系统实现模拟信号的转换,使其成为可以被计算机处理的数据序列。当然,在机器人视觉系统工作的过程当中,对视觉信息的处理和分析也是十分关键的。该过程以图像处理为基础,通过对图像的增强、数据的编码以及传输、特征抽取、理解等一系列的流程实现输出图像质量的优化提升,从而更加方便计算机系统对所获取的图像进行深度的分析和处理。所以在这样的过程中实现RGB图像的获取和HSI空间模型的转换才是最基本的设计原理。
3 具有颜色识别功能机器人的设计研究
3.1 整体构架
(1)硬件设计。简而言之,硬件是看得到摸得到的东西。机器人的研究设计过程当中硬件的设计既包含机械部分也包含电气部分。可以说整个硬件设计几乎包含了机器人的所有功能,在设计的过程当中,机械结构要满足机器人的使用功能,其重点在于各类机械尺寸的选择、驱动方式的决定以及电机的选择等,电气部分是机器人的核心,设计的根本在于信息的接收处理以及对机器人所有动作的指挥。在对具有颜色识别功能的机器人进行设计研究时,电气设计的难点和重点皆在于视觉识别系统。而实际上视觉识别系统也是一种感知系统,通过对目标的识别来实现信息的传递,从而达到对外部环境和内部状态的理解,为进一步的智能作业提供决策依据。
(2)软件设计。相比较硬件而言,软件是一种看不见摸不到的东西,但却能够实现具体的运算和控制。整个软件系统既有原生操作系统、也有感知控制系统,当然也包含SLAM(同步定位与地图构建)和路径规划系统,整个软件的设计是以硬件为基础的,设计的核心就在于通过各种程序以及算法的设定和实现,达到对硬件控制的目的,因而在完成机器人的一系列活动同时实现各功能的调试和优化。
3.2 目标识别算法研究
(1)颜色识别算法分析。颜色识别以颜色空间、分量关系为基础,所以在进行识别的时候,首先要进行的就是颜色空间选取。颜色空间包含基色颜色空间和色亮分离的颜色空间。在RGB颜色空间中,直角坐标空间的变量为红、绿、蓝三个变量,但这三种变数彼此独立,且性质对等,是其他颜色空间的基础。

图2 RGB颜色空间模型
色亮分离的色彩空间结构则主要是将色彩分为表色与表光两种属性空间结构,也就是人们常说的HSV(HSB)空间结构,在HSV的空间结构中三种色彩属性彼此独立但特性完全不同,在颜色识别算法中一般采用HSI模式的建立方式来对色相、饱和度以及明度进行描述。在机器人对颜色进行识别的过程当中主要就是通过HSI模型来实现有效判断。

图3 HSV(左图)和HSI(右图)颜色空间模型
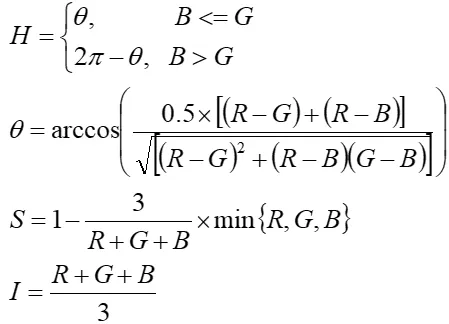
实际上,在颜色空间模型的转换过程实现的就是由RGB实现HSI的转换。常见的转换算法由此几何推导法、坐标转换法、分段定义法以及标准模型法和Bajon近似法,转换思路的不同对整个HSI颜色空间模型的转换会造成不同的结果。其中最为经典最容易理解也最容易计算识别的转换算法就是几何推导法,整个几何算法推导的过程实际上实现的就是亮度信息的分离,最终完成三维空间向二维空间的转换,这样一来通过平面内向量点积公式是使用就能够完成HSI模型色调分量值的计算。RGB转换到HSI的计算公式如下:首先给定RGB颜色空间的值(R0,G0,B0)其中,则转换到HSI空间的(H,S,I)值的计算如下:设将(R0,G0,B0)归一化得(R,G,B)为:
(2)目标定位。机器人通过摄像头进行RGB彩色图像采集,且在采集的过程当中会受到光线变化的影响,因此造成RGB值的分布产生一定的变化,这是不利于机器人进行特定颜色识别的。相比较而言,HSI空间更加吻合人眼识别颜色的方式,展现的是一个主观的颜色识别感觉,所以为了提高识别的稳定性在对颜色识别智能机器人控制系统的设计过程当中需要引入HSI颜色空间。在实现RGB到HSI空间的转化之后,就可以通过不同H值来完成图像的二值化处理,二值化的过程实际上是将图像当中所含有的0~255的二进制像素依照规定的阈值划分为两类,经过二值处理完成后的图像可以实现目标区域外矩形位置的计算,进而实现对图像的标定,完成机器人的颜色识别。

图4 图像处理流程图
3.3 控制系统设计
(1)设计原则。具有颜色识别功能的机器人控制系统设计的宗旨在于完成图像识别后实现功能、控制形式和本体三方面的统一确定,整个控制系统可分为单CPU控制方式、二级CPU控制方式以及多CPU控制方式来实现。其中二级CPU控制方式以一级CPU为主机,实现联机接口和数据的运算,在该过程中一级CPU为两级CPU提供了数据读取,而两级CPU则通过存储器来完成数据的转换、扩展、并完成控制工作。多CPU控制器由多微控制器所构成,在每个控制器中都具有自己单独的CPU来完成设备操作与数据收集。在对系统进行总体设计的过程中,不管采用什么控制系统机构都要坚持简单构造、便于维修、标准化、便于推广的总体设计原则,并且还要提高系统设计的安全性,尽量利用成熟的环境进行开发,以免在设计的过程中遇到不必要的麻烦。
(2)电压电路设计。机器人的工作过程当中需要电源提供动力,但实际上机器人的工作过程当中不同于其他的工作电器,因为机器人的结构构造比较复杂例如说驱动机工作电压为24V,红外传感器的供电为5V,超声传感器电压为12V,所以在电源电压电路设计的时候需要根据不同需求进行不同等级的电压设计配备。
(3)处理器的选择。处理器是整个控制系统的重要构成,在进行选择时既要考虑到数据处理的能力也要考虑到丰富的外设资源,结合软件、硬件的开发难度进行处理器的优化和选择。在该过程当中,需要结合传感器来实现数据的采集和分析。
4 结语
机器人设计是一门复杂且高深的学科,整个设计过程当中,既有智能控制,也有机械控制,既有软件设计,也有硬件设计。但实际上在进行颜色识别功能机器人设计时最主要的设计方向就是通过程控制系统的装置来对机器人进行控制,在这样的过程当中需要通过摄像头进行图像的采集,再由控制系统经过空间转换利用连通域算法实现位置标定。
实际上无论是何种机器人的设计和研究,归根结底都是集信息技术和自动化于一体的高新技术,设计研究的过程都离不开计算机和人工智能的发展。因此,在未来,在人工智能、计算机科学以及传感器的发展基础上,机器人的设计研发水平也会更上一层楼。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
少儿科学周刊·儿童版(2015年11期)2015-12-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
意林(2011年10期)2011-05-14