
基于MEMS 惯性传感器的助残手控制方法研究*
2022-07-09 07:51崔建伟杜韩李志钢
传感技术学报 2022年4期
崔建伟杜 韩李志钢
(东南大学仪器科学与工程学院,江苏 南京 210000)
据统计,目前我国已有8 500 万残疾人,约占中国总人口比例的6.21%,其中包含不少手部残疾患者。 手部残疾人士由于手部肢体的缺失,难以实现日常生活中如喝水、穿衣等基本动作,缺乏基本的生活自理能力。 如何解决这些人的生存困境,成为目前亟待解决的重大社会问题。
近年来,有不少关于灵巧助残手的研究[1-2],为助残机械手控制提供了充分条件。 抓取操作是助残手的基本功能,但助残手必须与人体的运动意图相协调,在合理的时机执行动作,因此,对上肢运动意图的识别成为机器人学科面临的重要难题之一。 何群、孙会文等[3-4]通过采集人思维活动时的脑电信号并进行分类识别来判断向左或向右的运动意图,虽然实验达到了一定的准确率,但脑电信号信噪比低、特征提取困难,且易受到主观思维影响,要求手残人保持极高精神集中度。 郑长坤等[5]融合脑电信号和肌电信号,并通过模式识别方法对下肢运动意图进行识别,能够有效识别站立、行走、上坡等六种下肢运动。 一些研究通过计算机视觉[6-7]对肢体运动意图进行识别,但摄像设备易受光线、拍摄角度等环境因素的影响。
随着微机电系统(MEMS)的发展[8],大量小尺寸、低功耗、低成本、集成度高的MEMS 传感器出现在人们视野中,并在手势识别、动作识别等领域得到广泛应用[9-11]。 但动作识别是基于一个完整的动作流程,无法实时判断人体上肢运动意图并执行相应动作[12]。 基于此,本文通过MEMS 惯性传感器采集上肢运动过程中的姿态角数据,分析姿态变化与运动意图之间的关系,并设计基于意图识别的助残手控制方法。
1 控制系统框架设计
本文设计了基于MEMS 惯性传感器的助残机械手控制系统,其中数据采集部分由数据手套完成,数据手套由5个触觉传感器、7个弯曲传感器和3个MEMS 惯性传感器组成。 如图1 所示,数据手套的三个MEMS 惯性传感器固定于上肢手背、前臂、上臂三个部分,每个传感器可直接输出姿态角,即横滚角、偏航角、俯仰角。 控制部分由助残机械手和单片机完成,实验时人手握住机械手进行运动,PC 端对数据手套采集的数据进行处理,并通过串口给单片机发送控制指令,然后由单片机输出高低电平控制助残机械手的闭合或张开来实现助残机械手的抓取动作。

图1 传感器佩戴位置与实验设备
2 上肢运动规律研究与意图分析
喝水动作为上肢运动中典型的抓取动作,因此本文以喝水动作为例,对上肢抓取动作的运动规律进行研究。 手臂的姿态角数据不仅能判别手臂的运动或静止状态,而且能反映手臂运动过程中的姿态变化。 由于上臂距离肩关节位置较近,人体做抬臂运动时,上臂的姿态角数据变化不明显,因此选取手背处及前臂处的姿态角数据进行分析,研究上肢的运动意图。
图2 为经过滑动平均滤波后的实验数据,横轴表示采样时间为5 ms 时得到的采样点,纵轴表示手背处及前臂处的姿态角。 其中,带有五角星、圆形、三角形的曲线分别表示横滚角、偏航角、俯仰角。

图2 喝水动作手掌与小臂的姿态角曲线图
当姿态角数据没有变化趋势或小幅度摆动时表示手臂处于静止状态,姿态角数据有明显变化时表示手臂处于运动状态,以手臂两种状态的转换为界,将整个过程分为9 段。 图2 中AB 段、CD 段、EF段、GH 段、IK 段手臂均为静止状态,AB 段为执行动作前的预备阶段,CD 段对应手掌闭合抓取杯子的动作,EF 段为拿着杯子喝水的状态,GH 段对应手掌松开放下杯子的动作,IK 段为喝水动作结束状态,同时也是下一动作周期的预备阶段。 BC 段、DE段、FG 段、HI 段手臂均处于运动状态,并分别对应伸手拿杯子、将杯子送到嘴边、放回杯子、将手放回原处的运动过程。
实验发现,手掌都在手臂处于静止状态时进行开闭操作,比如在CD 段抓取杯子和在GH 段打开手掌放下杯子。 但手臂的静止状态不能作为手掌进行开闭操作的唯一依据,如在EF 段,手臂虽然处于静止状态,但此阶段上肢处于拿着杯子喝水的状态,手掌不应进行开闭操作。 以及同样为静止状态的IK 段,此时喝水动作已经完成,也无需进行开闭操作。
为了研究手臂静止状态下手掌的开闭运动意图和姿态角的关系,将除了预备阶段AB 段外,手臂处于静止状态的各阶段姿态角的具体数值用柱状图表示。 如图3 所示,横轴为手臂处于静止状态的四个阶段:CD 段、EF 段、GH 段以及IK 段。 每段第一个条柱、第二个条柱、第三个条柱分别表示对应阶段下连续十个采样点的横滚角之和、偏航角之和、俯仰角之和。 CD 段对应手掌闭合抓取杯子的过程,GH 段对应手掌张开松开杯子的过程,从图中可以发现,GH 段手掌及前臂的姿态角与CD 段的姿态角十分相近,而EF 段、IK 段的姿态角与CD 段相差较大。

图3 手臂静止时手背与小臂的姿态角
通过对上肢执行喝水动作的姿态角数据的分析,发现上肢的动静状态以及姿态与手掌的开闭意图存在一定的联系。
(1)为了稳定地抓取或松开物体,手掌的开闭操作通常在手臂处于静止状态时。
(2)手臂经历了一个“静止-运动-静止”的状态变化后,手掌张开抓取物体。 第一个静止状态为预备状态,第二个静止状态为手掌张开进行抓取操作的阶段。
(3)手掌松开物体时,手背及前臂的姿态与手掌抓取物体时的手掌及前臂姿态几乎相同。
3 手臂静止状态与动态状态的区分
手臂处于静止状态时,手臂的姿态角数据保持平稳,手臂运动时,手臂的姿态角数据会产生剧烈变化,因此本文选择对数据变化敏感的移动方差来区分手臂的动静状态。 计算过程如下。
(1)移动方差的计算是基于滑动窗口实现的,设定窗口长度l=20个采样点。 当数据手套完成20次采样后,生成滑动窗口,即滑动窗口的初始数据为第1 到第20个采样数据,随着之后每次采样的完成,滑动窗口向后滑动一个点。
(2)计算当前窗口内姿态角数据的方差综合值:
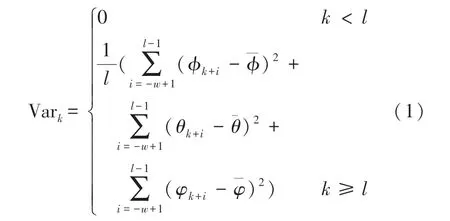
Vark为k时刻窗口的方差综合值,ϕk+i、θk+i、φk+i分别为k时刻窗口中第i+l个点的横滚角、偏航角、俯仰角。分别为k时刻窗口中横滚角、偏航角、俯仰角的平均值。 滑动窗口采用向前窗口是因为,意图预测与助残手控制相关,对实时性要求高,需要消除窗口长度带来的延迟性。
图4 为喝水动作的手臂姿态角和移动方差综合值的对应结果,可以看出喝水动作中手臂每一次的动态过程都能和移动方差综合值的波峰对应,而手臂处于静止状态时,姿态角的方差综合值接近于0值。 因此可取一个阈值thv,当Vark≤thv 时,手臂处于静止状态,否则手臂为动态状态。 由大量实验经验确定阈值thv =0.01。

图4 手臂姿态角与方差综合值对应图
4 基于意图识别的助残手控制方法
抓取动作的意图识别关键在于能否在合理的时刻控制助残机械手的开闭,让助残机械手根据人体意图完成动作。 基于对上肢运动规律的研究与分析,本文设计一种基于意图识别的助残机械手控制方法,步骤如下:
为了稳定地控制助残手,做出如下规定:从预备阶段到将手放回原处为一个动作周期,将手放回原处后的静止阶段为下一动作周期的预备阶段。
①采集手背、前臂、上臂处的姿态角数据,并进行滑动平均滤波。
②计算当前采样点的移动方差综合值Var,并与阈值thv 比较,判断手臂的动静状态。 一开始上肢处于预备状态,移动方差综合值小于阈值,即Var≤thv,当Var>thv 时说明上肢结束预备状态开始动作。
③当检测到移动方差综合值再次小于阈值时,则手臂处于静止状态,记当前时刻为t,此时给单片机发送控制指令,助残手闭合进行抓取操作。 并记录下第t+1 到t+10个采样点手背及前臂处的横滚角之和、偏航角之和、俯仰角之和ϕht、θht、φht、ϕft、θft、φft。
④持续计算当前采样点的移动方差综合值,判断手臂的动静状态,若识别到手臂处于静止状态,记当前时刻为k,并将第k+1 到k+10个采样点手背及前臂处的横滚角之和、偏航角之和、俯仰角之和与ϕht、θht、φht、ϕft、θft、φft做差,计算公式如下:

式中:ϕhk、θhk、φhk、ϕfk、θfk、φfk为第k+1 到k+10个采样点手背及前臂处的横滚角之和、偏航角之和、俯仰角之和。
⑤设定阈值thδ,当δ ⑥控制助残手张开后,继续采集数据,判断手臂的动静状态。 直到检测到手臂下一个静止状态时,至此,一个动作周期完成,此静止状态阶段为下一动作周期预备阶段。 结合助残机械手的研究背景,本文选取上肢运动中常见的5 种抓取动作进行实验,分别是喝水、刷牙、接电话、梳头发、涂唇膏,其中喝水、接电话、涂唇膏三种动作类似,上肢均在EF 段处于静止状态,刷牙与梳头发动作类似,上肢在EF 段有小幅度摆动。因此分别选取两类动作中的一个代表动作:喝水动作和刷牙动作的一组数据进行具体分析。 5 种抓取动作的动作流程如表1 所示。 表1 实验动作流程 实验设备包括数据手套和助残机械手,招募5名健康志愿者进行实验,要求志愿者右臂穿戴数据手套,手握机械手按表中动作流程执行动作,每种动作执行10 次。 鉴于手背处姿态角变化与前臂处姿态角变化趋势相似,因此只需选择其中一种数据进行分析即可,此处选择前臂处姿态角数据进行分析。 图5 为实验中一次喝水动作的前臂姿态角曲线图,带有五角星、圆形、三角形的曲线分别表示横滚角、偏航角、俯仰角变化曲线。 C1D1段为预备阶段后的第一次静止状态,机械手进行抓取动作,E1F1为第二次静止状态,但此阶段的姿态角与C1D1段姿态角之差大于阈值thδ,故机械手不进行开闭操作,G1H1段为第三次静止状态,此阶段的姿态角与C1D1段姿态角之差小于阈值thδ,机械手张开放下杯子。 I1K1段为喝水动作完成后的第一个静止阶段,也是下一动作周期的预备阶段。 图5 喝水动作的小臂姿态角曲线图 图6 为实验中一次刷牙动作的前臂姿态角曲线图。 A2B2段为预备阶段,C2D2段为预备阶段后第一次静止状态,机械手抓取牙刷。 E2F2段机械手抓着牙刷在牙周附件刷动,与喝水动作不同,刷牙动作此阶段的姿态角会发生小幅度波动,故此阶段手臂既可能被判定为静止状态,也可能被判定为动态状态,被判定为静止状态时,其姿态角与C2D2段姿态角之差大于阈值thδ,机械手不进行操作,被判断为动态状态时,机械手也不会进行操作。 G2H2段手臂为静止状态,且此段姿态角与C2D2段姿态角之差小于阈值thδ,机械手张开放下牙刷。 图6 刷牙动作的小臂姿态角曲线图 表2 为五种动作的意图识别结果,喝水、刷牙、接电话、梳头发、涂唇膏的识别率分别为100%、90%、100%、84%、96%,平均识别准确率达到94%。 表2 运动意图识别结果 本文利用MEMS 惯性传感器采集上肢进行喝水动作时的姿态角数据,分析姿态角的变化趋势与机械手抓取意图之间的关系。 通过姿态角的移动方差综合值来区分手臂的动静状态,并根据手臂静止时手背以及前臂处姿态角的数值来判断机械手的开闭意图,设计了一种基于意图识别的助残机械手控制方法。 最后选取上肢运动中常见的5 种抓取动作进行实验,平均识别准确率达到94%,验证了该方法对不同的抓取动作具有一定的普适性。5 实验
5.1 实验设计

5.2 实验结果



6 结语
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
农机使用与维修(2022年7期)2022-07-14
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
海峡姐妹(2019年5期)2019-06-18
黑龙江教育·理论与实践(2018年9期)2018-12-13
科学之谜(2018年5期)2018-07-26
现代职业教育·中职中专(2018年7期)2018-05-14
环球时报(2016-09-27)2016-09-27
