
国土资源数据整合下无人机低空遥感监测系统设计
2022-07-08 09:21卢征
电子设计工程 2022年13期
卢征
(河南省有色测绘有限公司,河南安阳 455000)
国土资源数据整合的实施必须借助统一的应用标准,从数据与技术的角度出发,为保证不同技术环节、不同来源数据、不同网络结构之间的接口标准化,资源型数据在信息流网络中必须保持畅通与共享的传输状态[1-2]。通常情况下,国土资源数据整合需要同时遵循电子字典、元语言编码、元数据编码等多项执行标准,一方面对各项数据应用信息进行打包处理,另一方面也可以缩小传输信息参量所占据的物理应用空间。
无人机遥感利用先进的飞行器驾驶技术,对国土资源数据进行采集与处理,从而使得核心控制主机能够准确掌握区域环境中的地质资源情况[3]。然而,传统GIS 型遥感监测系统并不能保证国土资源数据的实际集成效果,易造成信息整合速率的不断下降。为了解决上述问题,设计国土资源数据整合下无人机低空遥感监测系统,在遥感监测电路、资源整合服务器等多个硬件结构的支持下,建立国土资源数据仓库树,再通过Oracle 数据库实现对数据信息参量的加密与整合处理。
1 系统硬件设计
无人机低空遥感监测系统的硬件执行结构包括无人机低空监管中心、遥感监测电路、数据资源整合服务器3 个组成部分,具体搭建方法如下。
1.1 无人机低空监管中心
监管中心作为无人机低空遥感监测系统设计的基础硬件执行结构,由资源信息传输、飞行线路部署、遥感现场部署等多个环节组成。随着无人机设备飞行距离的延长,数据链会加速向外传输已采集到的国土资源数据,并可在监测平台主机的作用下,实现对基层遥感客户端的调节与控制[4-5]。在已知飞行线路部署与遥感现场部署的情况下,国土资源信息的传输速率数值会受到外界的影响。若控制数据链传输速率保持不变,则可认为遥感客户端对于国土资源数据信息的需求量越大,无人机设备的低空飞行速度就越快。无人机低空监管中心操作流程示意图如图1 所示。

图1 无人机低空监管中心操作流程示意图
1.2 遥感监测电路
遥感监测电路可提供无人机低空遥感监测系统所需的所有传输电子量,满足监管中心国土资源数据整合需求,同时可确定电量信号在单位时间内的最大输出量条件。遥感监测电路中同时分布着多个消耗电阻,其中一部分电阻的连接阻值可变,可以根据更改接入实值的方式,对国土资源数据的整合应用环境不断进行调试;另一部分电阻的连接阻值不可变,其具体数值量水平只能与无人机设备的遥感监测行为保持相对适当的连接状态[6-7]。供配电设备、给排水设备、高层垂直运输设备、空调系统设备、通风系统设备作为5 类不同的电子量消耗设备,遵循无人机设备在遥感监测过程中的目标选取原则,对国土资源数据信息进行深入的整合与处理。遥感监测电路结构如图2 所示。

图2 遥感监测电路结构图
1.3 数据资源整合服务器
数据资源整合服务器与系统遥感监测电路直接相连,可在无人机低空监管中心的调度下,对核心遥感体系与局域监测网络进行初步维护,再借助监测服务器与交换机设备实现对底层无人机的有效控制[8]。底层无人机控制主机负责协调无人机设备与系统局域监测网络之间的连接关系,一方面可对暂存于交换机结构之中的国土资源信息进行充分调度,另一方面也可在核心遥感体系中实现对这些信息参量的整合与处理。通常情况下,数据资源整合服务器所属的无人机控制数据数量越多,系统最终所收获的国土资源数据信息就越完整[9]。数据资源整合服务器结构如图3 所示。

图3 数据资源整合服务器结构
2 系统软件设计
在相关硬件执行结构的支持下,按照国土资源数据仓库树设置、Oracle 数据库连接、数据加密整合的处理流程,实现系统软件执行环境的搭建,两相结合,完成国土资源数据整合下无人机低空遥感监测系统的软件设计。
2.1 国土资源数据仓库树
国土资源数据仓库树具有本地连接、SDE 连接两种应用形式。其中,本地连接通过无人机设备在低空监测环境下获得遥感信息,可直接存储于Oracle 数据库主机之中,而在此过程中,已采集的信息参量始终维持着原始的连接与传输形式,即国土资源数据的仓库树存储结构[10-11]。SDE 连接通过主机独立处理国土资源获得的数据信息,且由于无人机低空飞行距离的延长,这些信息参量在存储过程中所属的遥感节点位置也会随之改变,直至能够将所有数据信息完全存储于Oracle 数据库中。
2.2 Oracle数据库
Oracle 数据库负责存储无人机低空遥感监测系统所采集到的国土资源数据,并可借助输出信道,将这些信息参量调配至相关硬件整合结构中[12-13]。整个数据库环境由数据整合空间、遥感监控空间两部分组成。其中,国土资源数据整合空间能够直接获取仓库树体系中生成的数据信息处理方案,并可为数据库用户分配执行任务,同时将待整合信息反馈给数据库对象[14]。遥感监控空间主要负责制定基础地形与无人机飞行方案,并将已生成的数据信息指令直接存储在相关数据库用户节点之中。Oracle 数据库连接结构如图4 所示。
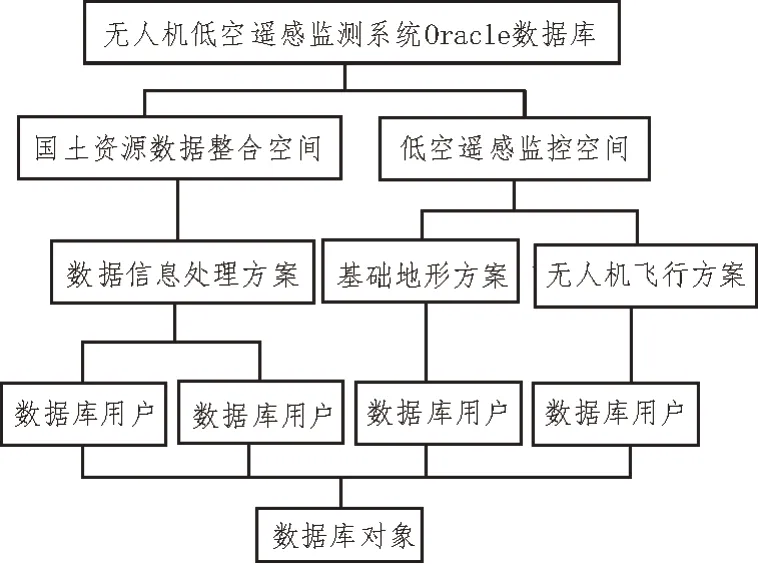
图4 Oracle数据库连接结构
2.3 数据加密整合
数据加密整合处理可在已知国土资源数据传输量条件的基础上,按照数据仓库树体系的连接需求,对无人机低空遥感监测节点进行妥善安排,从而使系统主机具备更强的数据信息处理能力。在不考虑其他干扰条件的情况下,系统数据加密整合处理结果同时受到遥感监测系数、无人机飞行速度量两项物理指标的影响[15-16]。其中,遥感监测系数可表示为y,由于单位时间内系统可监测到的国土资源数据量相对有限,因此该项物理指标的数值水平不宜过大。无人机飞行速度量可表示为vˉ,一般情况下,为获得更为稳定的国土资源数据整合结果,该项物理量的数值表现水平基本能够保持相对稳定的存在状态。联立上述物理量,可将无人机低空遥感监测系统的数据加密整合结果表示为:

式中,β表示国土资源数据在单位时间内的传输整合量,e表示数据信息量的幂次项整合系数,u1、u2分别表示两个不同的国土资源数据特征监测量。完成各项物理系数指标的计算与处理[17-18],在确保运行环境相对稳定的情况下,实现国土资源数据整合下无人机低空遥感监测系统的顺利应用。
3 对比实验分析
选取图5 所示农田环境作为实验背景,在固定位置处设置一个地面基站作为系统监测主机的放置节点,调试GPS 定位网络,使无人机设备置于低空飞行环境中。当无人机飞行状态趋于稳定后,将所获数据平均分成两等份,其中一份输入至实验组监测主机中(实验组以国土资源数据整合下无人机低空遥感监测系统作为主机驱动方式),一份输入至对照组监测主机中(对照组以GIS 型遥感监测系统作为主机驱动方式)。

图5 目标实验环境
单位时间内的国土资源数据整合速率能够反映系统主机对于国土资源数据的实际集成效果,一般情况下,整合速率越快,系统主机对于国土资源数据的实际集成效果也就越好,反之则越差。
表1 记录了无人机飞行速度为72 km/h时,实验组、对照组国土资源数据整合速率的具体变化情况。

表1 无人机飞行速度为72 km/h时国土资源数据整合速率
已知实验以15 min作为一个单位时长。分析表1可知,对照组国土资源数据整合速率在整个实验过程中始终保持绝对稳定的数字表现状态,且其均值水平只能达到0.8 Gb/s。实验组国土资源数据整合速率始终保持小幅波动的数值变化状态,整个实验过程中的平均数值为1.56 Gb/s,高于对照组均值水平,而最大值达到了1.7 Gb/s,更是远高于对照组数值水平。
表2 记录了无人机飞行速度为50 km/h时,实验组、对照组国土资源数据整合速率的具体变化情况。
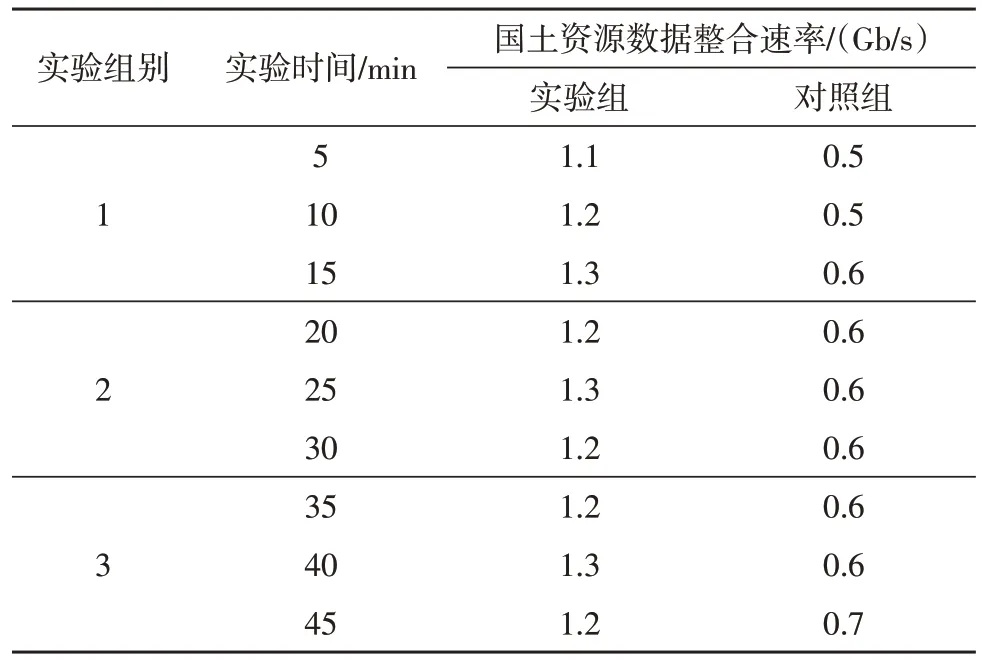
表2 无人机飞行速度为50 km/h时国土资源数据整合速率
分析表2 可知,对照组国土资源数据整合速率在实验过程中保持缓慢上升的变化形式,整个实验过程中的平均数值仅为0.66 Gb/s。实验组国土资源数据整合速率依然保持小幅波动的数值变化趋势,整个实验过程中的平均数值达到了1.22 Gb/s,高于对照组数值水平。
综上可知,国土资源数据整合下无人机低空遥感监测系统在无人机飞行速度为72 km/h和50 km/h时,均能够实现对国土资源数据整合速率均值的提升,符合增强数据信息实际集成效果的应用处理需求。
4 结束语
与GIS 型遥感监测系统相比,无人机低空遥感监测系统在遥感监测电路、数据资源整合服务器等多个硬件应用结构的支持下,借助数据仓库树体系,对Oracle 数据库进行连接处理,从而使国土资源数据加密整合效果不断趋于完善。从实用性角度来看,国土资源数据整合速率值的增大,能够较好保证国土资源数据的集成效果,在无人机遥感技术创新方面具有较强的应用可行性。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
昆明理工大学学报(自然科学版)(2022年4期)2022-09-07
煤气与热力(2022年2期)2022-03-09
中学生数理化·高一版(2021年11期)2021-09-05
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
河北地质(2020年1期)2020-09-16
北京航空航天大学学报(2017年9期)2017-12-18
长江丛刊(2017年34期)2017-11-15
