
基于图像识别技术的电力调度主站系统信号自动对点系统
2022-07-08 09:21陈东海李鹏周洋吴昱浩张海永
电子设计工程 2022年13期
陈东海,李鹏,周洋,吴昱浩,张海永
(国网宁波供电公司,浙江宁波 315000)
随着电力系统规模的不断扩大,电网调度越来越重要。当前,地区电网调度自动化水平较高,减轻了运行人员的工作量[1]。同时,电网发生故障时会有大量信息涌入,也增加了操作员信息识别和故障处理的难度。电力系统工程师和操作员还需要对大量数据进行校对[2]。随着智能电力调度主站的不断推进和部署,电力调度主站内监控信息也越来越多,大量监控信息需要与调度控制系统相连接,导致工程实施过程集中且费时,容易影响工程的预期调试[3]。为此,对电力调度主站系统信号对点具有重要意义。
现有电力调度主站系统信号对点均采用人工方式,人工对点通过硬接线方式和单通道对点方式进行对点,其工作效率较低。电力调度系统模拟器点多,采用人工方式对各调度主站对点,需要大约一个星期的时间才能完成全部对点工作。全站快速全景扫描系统虽然能够实现遥测信息全站快速全景扫描,但不能实现与调度主站的快速匹配。针对该问题,提出了基于图像识别技术的电力调度主站系统信号自动对点系统设计。
1 硬件结构设计
电力主站系统信号自动对点系统包括后台服务器、远端电网关断、测控及模拟装置[4],利用IEC104协议实现远程电力通信。智能电力调度主站的信息交换机连接测控设备和设备模拟器。通过IEC61850协议,信息交换装置与后台服务器和远程电网实现通信[5-7]。系统硬件结构如图1 所示。

图1 系统硬件结构
系统硬件中包含远程控制信号和背景信号。远程控制信号与背景信号相关联,可以可视化自动对比背景信号和远程控制信号,提高现场工程师的工作效率和速度,在工厂终端实现全自动闭环业务流程,降低调试成本[8-9]。该方法也可用于智能电力调度主站的自动验收,验证调度信号与遥控信号、遥控信号与背景信号是否一致[10-11]。
1.1 远动网关机
IEC61850标准是电力调度主站网络通信标准,必须对该标准中的通信模型进行修改,以便用于电力调度主站和调度中心主站之间的通信。基于IEC61850的电力远动通信网络结构如图2 所示。

图2 电力远动通信网络结构
由图2 可知,IEC61850 协议用于与间隔层IED进行远程电网关断通信,同时用于电力调度数据网络与调度中心主站的通信,电力调度数据网络将远程数据发送到主站[12]。遥控关断是变电所内部IED的通信代理,用于避免调度主站直接与各IED 进行通信,提高系统安全性。IEC61850 协议作为电力调度主站内部及电力调度主站与调度站之间唯一的网络通信协议,消除了协议间转换,实现了不同调度站的无缝集成[13]。
1.2 后台服务器
通过对服务器、前置机和网络结构的设计,提高了系统的容错能力。两台后台服务器对等工作,通过两个网卡连接到调度终端系统局域网。通常情况下,两个后端服务器同时运行,并管理各自独立的区域。通过网络,两台后台服务器相互监控彼此的运行状态,一旦发生故障,另一台服务器立即接管系统[14]。双重后台服务器管辖区域还可通过系统维护工作站的命令进行手动切换。
1.3 测控装置
根据IEC61850 规范要求,将调度主站系统结构划分为3 个部分:调度主站、间隔层和过程层。集中装置需与其他工作层、仪器设备及时进行数据通信和反馈,设在间隔层[15]。电力调度主站系统运行时,调度主站和过程层需要进行信息交换,过程层的网络信号负责与智能终端和并网单元进行通信,有效地完成了向后台服务器传输间隔信号的任务。测控装置结构示意图如图3 所示。

图3 测控装置结构示意图
为提高设备的性能,在改进中央保护设备时,选用高性能CPU 模块、256 MB 内存芯片处理服务器,采用超低电压技术Pentium M,在全双工况下运行。
1.4 装置模拟器
装置模拟器结构中的各模块连接图如图4所示。

图4 装置模拟器结构中的各模块连接图
通过设置人机界面中模拟PMU 子站数目,在一个端口上建立多个并发套接字连接,从而模拟多个PMU 子站的建立。就设备总体设计而言,经过综合比较,选择ARM Cortex-A8 工业控制处理器。
2 软件部分设计
2.1 基于图像识别技术的降噪方法
在线图像监测系统首先对测量图象进行监控,截取一帧图像作为输入样本进行处理。对截取的输入图像进行特征量提取,并以数字形式输出特征[16]。然而,提取到的特征受到电力调度主站系统噪声的干扰,导致特征提取结果中存在较多的噪声散点。因此,需使用图像识别技术进行降噪处理。
当对采集到的图像进行去噪处理时,需要使用线性滤波器。输出像素值计算表达式为:

式(1)中,f(i+β,j+l) 表示输入像素值,h(β,l)表示对图像进行去噪处理时移动的距离。其中,β的计算公式为:

以输出像素值为核心,选取窗口平均值,获取像素处理过程中的平均权重,保持加权系数一致。图像中出现的噪点比周围像素点亮得多,如果将像素按照亮度从小到大排列,那么噪点会被排在两侧,容易区分。
2.2 自动对点流程设计
基于图像识别技术的电力调度主站系统信号自动对点流程如图5 所示。

图5 信号自动对点流程
由图5 可知,信号自动对点步骤包括:
步骤1 比对调度信号与远动信号。后端服务器获取由智能电力调度主站调度终端发送的调度点表,根据调度点表配置远程移动点库,生成远程移动点表,定义远程移动点表索引号,并根据索引号离线对远程移动点表进行一致性验证。
步骤2 远动信号与站内信号关联。若步骤1 通过验证,则导出的长焦表将被导入到后端服务器站库中,创建IED 对象A;MAP 结构用于缓存,IED 设备不包括新创建的IED 对象A;以IED 对象A 中的KTH远程动作点为起点,首先确定IED 设备MAP 结构中是否有信号点和远程信号点关联串,若不存在,则得出错误远程动点表。
步骤3 站内信号与远动信号可视化自动比对。在IED 对象A 中载入远距离移动点,并依次载入相应的关联点;通过IEC61850 协议,由测控设备或设备模拟器直接采集和显示远距离移动点的值。通过IEC61850 协议,测控设备或设备模拟器将关联点的值发送到远程移动网络,远程移动网络将信号点通过IEC104 协议直接发送到后台服务器IED 对象A 中相应的远程移动点,并实时显示[17-18];在远程移动点或关联点的值发生变化时,分别进行比较。如果远程移动点与关联点的值相同,则标记对点匹配成功,不再进行对点匹配。
3 实验分析
以2019 年1 月运用于河北某地区220 kV 主站为例,该主站遥信点数量为250个,遥测点数量为220个,遥控点数量为216个,通过6 次实验完成远动通信网络关机扫描和通信检测及调度信息表站内核对工作。在该环境下,对基于图像识别技术的电力调度主站系统信号自动对点系统进行实验验证分析。工程实例如表1 所示。
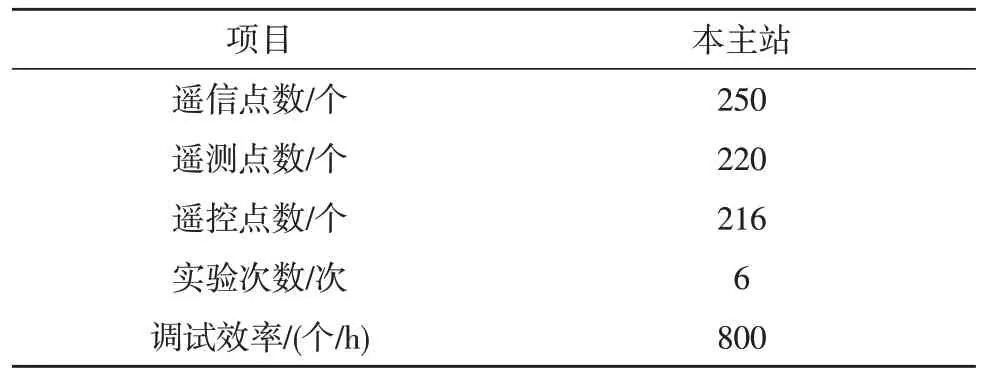
表1 工程实例
分别使用人工对点方法、全站快速全景扫描系统和基于图像识别技术的自动对点系统对上述工程实例项目中的点数进行对比分析,结果如图6 所示。

图6 3种方法自动对点数对比分析
由图6 可知,使用人工对点方法遥信点数对点结果与实际点数存在较大偏差,最多点数为242个,最少点数为238 个;使用全站快速全景扫描系统遥信点数对点结果与实际点数存在一定偏差,最多点数为243个,最少点数为241 个;使用基于图像识别技术自动对点系统遥信点数对点结果与实际点数偏差较小,最多点数为244个,最少点数为243 个。使用人工对点方法遥测点数对点结果与实际点数存在较大偏差,最多点数为220个,最少点数为218 个;使用全站快速全景扫描系统遥测点数对点结果与实际点数存在一定偏差,最多点数为220个,最少点数为216 个;使用基于图像识别技术自动对点系统遥测点数对点结果与实际点数一致,为220 个。使用人工对点方法遥控点数对点结果与实际点数存在较大偏差,最多点数为211个,最少点数为205 个;使用全站快速全景扫描系统遥控点数对点结果与实际点数存在一定偏差,最多点数为213个,最少点数为206 个;使用基于图像识别技术自动对点系统遥控点数对点结果与实际点数偏差较小,最多点数为216个,最少点数为214 个。
4 结束语
针对传统对点方法存在的缺陷,设计了基于图像识别技术的电力调度主站系统信号自动对点系统。使用图像识别技术优化调度主站,实现系统精准自动对点。由实验验证结果可知,该系统有效分离了噪点和正常点,缩短了调试周期,推进电力调度主站系统进一步实现自动化发展,使电力调度主站系统实现智能化和自动化。
猜你喜欢
中国水能及电气化(2019年10期)2019-11-07
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
电子制作(2017年23期)2017-02-02
中国新技术新产品(2016年23期)2016-12-26
小学生导刊(低年级)(2016年11期)2016-11-14
火控雷达技术(2016年1期)2016-02-06
科技与创新(2015年18期)2015-09-11
