
基于双目视觉的标定和立体匹配的研究
2022-07-08 09:21杨记鑫胡伟霞赵杰
电子设计工程 2022年13期
杨记鑫,胡伟霞,赵杰
(成都理工大学工程技术学院,四川乐山 614000)
随着计算机技术和机器视觉技术的不断发展,双目视觉技术的应用越来越广泛。双目测距是采用左右两个相机拍摄的图片,依据双目视差原理计算得到图片的深度信息的一种技术[1]。
双目测距通常由标定、校正、匹配三部分组成。由摄像头标定方法得到摄像头的结构参数,再用这些结构参数对图像进行校正,然后输入到匹配算法中,计算得到视差。其中,相机的光学像差对标定精度有很大影响,像素匹配算法决定测量的准确性。文献[2]提出了两步标定法,该方法中大部分参数是采用线性直接求解,计算速度较快,但是畸变模型较为简单,精度较低;文献[3]提出了一种标定算法,该方法没有考虑相机切向畸变;文献[4]提出了一种改进的张正友方法;文献[5]提出的DLT 方法,计算较大,标定精度相对较高;此外文献[6]提出了基于人工智能的标定算法。匹配部分通常采用基于深度学习的算法。文献[7]采用多个BRIEF 描述子实现立体匹配,效果较好;文献[8]提出的AANet 算法,匹配度较低;文献[9]提出的CTFNet 算法,匹配度较高,但是运算量较大,运算时间长。文中主要研究了相机标定和立体匹配的算法。
1 双目立体测距原理
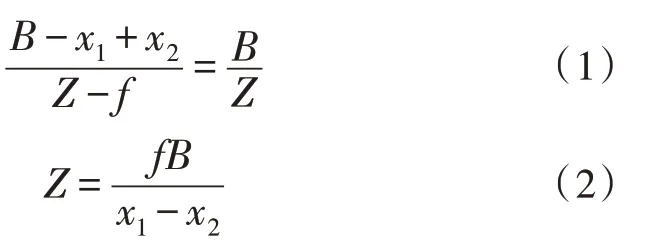
双目立体视觉测距系统主要由两个位于同一水平线的摄像头组成。两摄像头型号、批次完全相同,有公共的可视区域,依据三角相似的数学方法进行距离测量,测距原理如图1 所示[10]。O1和O2为摄像机两个摄像头的光心,距离为B,空间里某物体上点P,在左右两个摄像头成像平面所成的点分别为P1(x1,y1) 和P2(x2,y2)。假设摄像头焦距为f,由三角形相似原理可得:
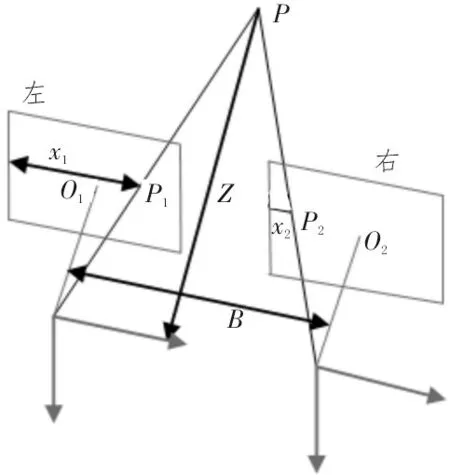
图1 双目测距原理
为了方便模型分析,设某P点在空间坐标系中的坐标为(X,Y,Z),在相机坐标系中的坐标为(X′,Y′,Z′),图像坐标系表示为(x,y),像素坐标系表示为(u,v),从空间坐标系到相机坐标系,需要进行平移和旋转,即:

空间点投影到平面上,满足投影法,可得出相机坐标系到图像坐标系,即:

图像坐标系的原点为相机光轴与成像平面的交点,单位是mm,像素坐标系是以像素阵列中第一个点为原点,单位是pixel,可得图像坐标系到像素坐标系,即:
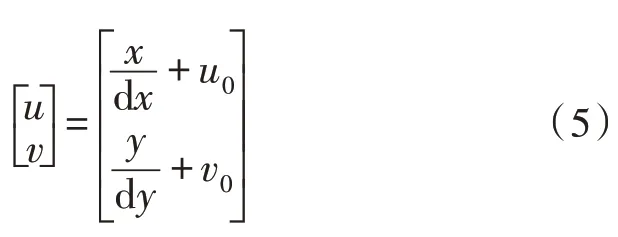
由以上式可得:
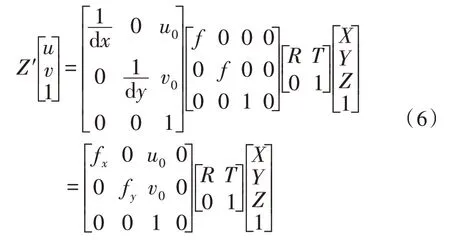
式(6)中的矩阵是由摄像机的参数确定的,可以通过标定方法获取。此外,摄像机还存在径向、横向、波透镜畸变等,对实际测量有很大的影响[11]。
2 相机参数标定算法
常用的张正友标定法主要是拍摄标定板在不同视角下的多幅图像,通过对应特征点的数学算法求出相机参数,该算法忽略切向畸变的影响,有很大的误差。基于BP 神经网络的标定法[12]主要由输入层、隐层以及输出层,通过反向传播不断学习得出输出与输入的关系,有非常强的非线性拟合能力,但是学习效率低,收敛速度慢,在初始权值和阈值的选择上随机性强,网络梯度下降方向上也比较随机,容易陷入局部最优解[13-14]。该文根据相机成像模型提出了一种改进型的BP 网络标定方法,采用遗传算法得到BP 网络的初始权值和阈值,如图2 所示。
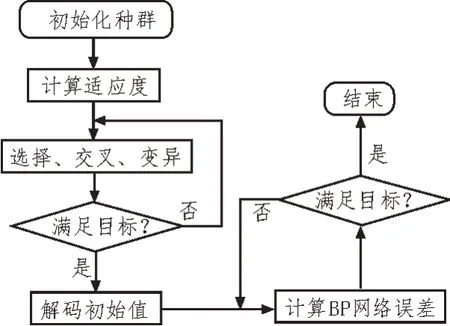
图2 遗传BP算法
1)初始化种群。对种群进行编码操作。编码方式采用实值编码方式,种群规模设置为60。
2)适应度函数。结合BP 网络的算法,需要满足适应度值为非负的要求,也为了后续计算方便,该文采用的适应度函数为:
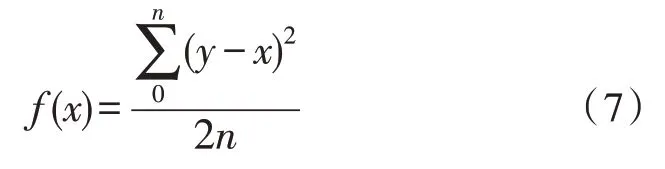
式中,x为样本值,y为对应的期望值,n为样本个数。
3)计算得到种群个体的适应度值,进行选择、交叉和变异操作。个体选择采用适应度比例方法,个体选择的概率为:

采用单点交叉的方式,交叉概率设置为0.8,采用基本位变异的方式,变异概率设置为0.005。迭代次数设置为60 代。
4)从种群中选取最优值,作为BP 神经网络的初始权值和阈值去训练网络。BP 网络为三层结构,输入层、隐含层和输出层神经元的个数分别是20、12和40,为了防止陷入局部最优解,该文采用自适应的学习率η满足:

其中,输入层到隐含层调节系数为0.5,隐含层到输出层调节系数为0.2,计算网络的输出误差,多次训练网络,直到满足要求。
5)采用训练好的遗传BP 神经网络实现相机的参数标定。
3 立体匹配算法
依据双目测距原理分析可知,求出左右摄像头拍摄的每幅图对应点的视差,即可得到图像的深度信息。立体匹配通常包括匹配代价、代价聚合、视差计算,该文提出了一种改进的CNN 结构实现立体匹配算法,如图3 所示。
传统的代价匹配选用局部区域进行计算。首先提取特征角点,对结果进行修正,将小于特定值的数值修改为0,只通过对应两幅图的边缘特征计算实现代价匹配。主要方法如下:左视图保持不动,右视图移动,设置最大的视差,对两幅图进行特征提取计算匹配代价,采用3×3、步长为2 的卷积核进行采样、均值池化、数值修正,连续运行3 次。为了提升运算速度,在卷积网络中加入残差模块,可快捷传递到底层。
为了充分利用左右两图的信息,代价聚合是将两个代价向量叠加成新的向量,特征信息从2D 变为3D,使用3×3×3、步长为2 的卷积核进行采样,该卷积运算量较大[16]。该文结合间接卷积算法对代价聚合进行改进。
按照宽和高将一个大的卷积计算拆分为若干个小的卷积计算,虽然在划分的过程中计算总量不变,但计算小矩阵时访存局部性更好,可以借由计算机存储层次结构获得性能提升。每个小的卷积块再使用Im2col 法将三维张量转换为二维矩阵,计算方法如下:
式中,input 是输入的尺寸,kernel 是卷积核尺寸,stride 是步长,output 是输出的尺寸。
在Caffe 中利用已经优化好的GEMM 库来为各个平台加速卷积计算,最后再采用Col2im 将二维矩阵转换成三维矩阵输出。
最后,采用softmax 函数进行视差预测[9]。

4 实验与结果分析
4.1 标定算法实验
实验所采用的标定板是9×6 的棋盘格,棋盘方格为40 mm×40 mm,使用两个USB 工业相机采集20组不同角度的标定图片,采用Harris 法进行特征点提取,然后进行标定。
另取一部分点进行测试,并与张正友标定法和BP 网络标定法对比,测试结果如表1 所示。与BP 算法[13]相比,该文提出的基于遗传BP 网络算法的标定精度有所提升。
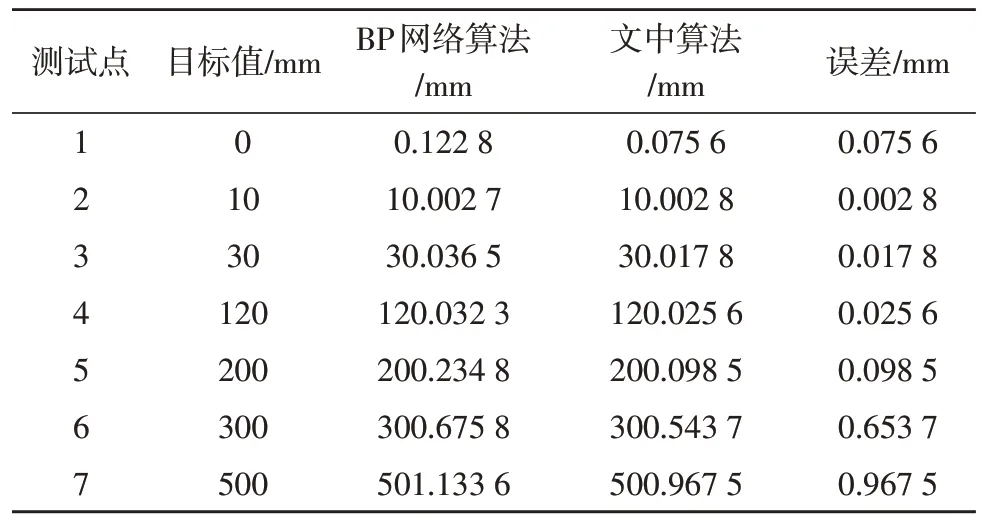
表1 标定方法测试对比
4.2 匹配算法实验
选取Middlebury 数据集的数据进行测试,将文中的算法与CNN 算法[15]、CTFNet 算法[16]进行对比,如图4 和表2 所示。
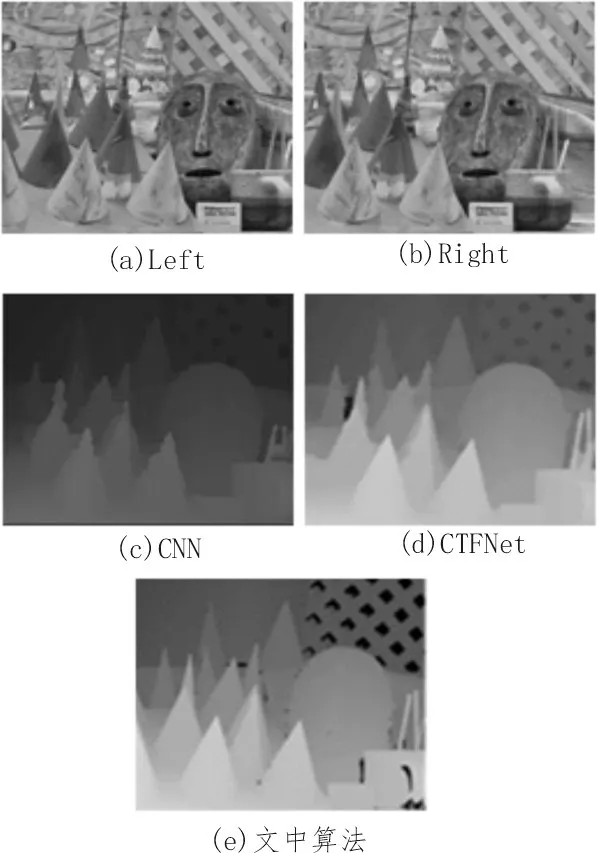
图4 匹配效果对比

表2 立体匹配算法测试对比
从图4 可以观察到,CNN 算法相对模糊,立体匹配效果较差;CTFNet 算法匹配效果较好,但图中出现无纹理和弱纹理区域。该文提出的算法,细节处理更加精确。由表2 可知,该文的算法在平均误差方面比参考的CNN 算法和CTFNet小,并且运行时间短,该算法可以很好地处理立体匹配。
5 结论
该文针对传统的标定算法进行改进,提出遗传BP 的标定算法,该算法主要利用遗传BP 网络的动态学习和不断修正的优点实现摄像头参数的标定,与传统的张正友标定和参考的BP 网络标定相比,精确度都有所提升。该文还对立体匹配算法进行改进,残差网络和数据修正可使运算时间减少,间接卷积的方式可使3D 卷积过程运算量减小,该算法可在保证精确度的前提下,缩短运行时间。
猜你喜欢
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
小型微型计算机系统(2022年1期)2022-01-21
计算机与数字工程(2020年11期)2020-12-23
疯狂英语·新悦读(2020年6期)2020-06-28
电子制作(2019年20期)2019-12-04
科教导刊·电子版(2016年23期)2016-10-31
现代计算机(2016年3期)2016-09-23
电脑知识与技术(2016年15期)2016-07-04
哈尔滨理工大学学报(2016年1期)2016-05-31
