
一种创意球形飞行器设计
2022-07-08 07:19程恒灏陈真崔延庞轩景泓远
电子技术与软件工程 2022年2期
程恒灏 陈真 崔延 庞轩 景泓远
(中国石油大学(华东)海洋与空间信息学院 山东省青岛市 266580)
微型飞行器(MAV)具有较小的结构尺寸、较低的飞行速度以及较低的雷诺数,并以其结构简单、易于控制、成本低廉等优点逐渐成为各个国家研究的热点。与常规飞行器相比,微型飞行器具有体积小、重量轻、结构简单、灵活度高等特点,可以进入一些狭小地区进行侦察,且操作更加简单、方便,具有很高的军事和民用价值。
但飞行器在侦察过程中,由于障碍物增多,飞行环境复杂,飞行碰撞的概率会增大,易导致飞行器坠落致使任务失败,造成回收困难等问题。
因此,为解决飞行器回收困难这一问题,本文提出了一种创意球形飞行器。该设计增强了飞行器的防撞性能,并且能实现红外避障、海上漂浮、空中定点悬停、地面滚动前进以及坠落后能实现再次起飞等功能。
1 研究背景
随着飞行器技术的不断成熟和飞行器市场的飞速增长,飞行器在人们的生活中已经屡见不鲜。飞行器的应用十分的广泛,可用于电网抢修、消毒、海上救援、勘探、侦察等,可以说飞行器的发展前景十分的广阔。
飞行器在上世纪最早被应用于空中侦察等军事用途。到21世纪初,随着全球卫星定位等新技术的涌现以及成本的降低,民用飞行器开始激增。截至2019年6月底,我国注册的飞行器数量高达33.9万架。统计数据显示,我国消费类飞行器出口数量占全球飞行器出口总量的70%左右,达到120多万架。深圳拥有世界民用小型飞行器70%的市场份额,成为全球飞行器产品的风向标。深圳还拥有大疆、一电、科比特等300多家飞行器企业,年销售总额超过200亿元。
近年来,微型飞行器由于其易于控制、携带方便、结构简单、雷达和可视信号弱等特点,被广泛应用于侦察领域。但微型飞行器在侦察过程中容易因外界碰撞和不利的天气因素造成损坏。
有人曾调查过224起飞行炸机事件,其结果如图1。由图1可看出,飞行器失事大部分原因是飞手自身疏忽。但除去飞手自身疏忽,环境因素导致炸机的概率最大。
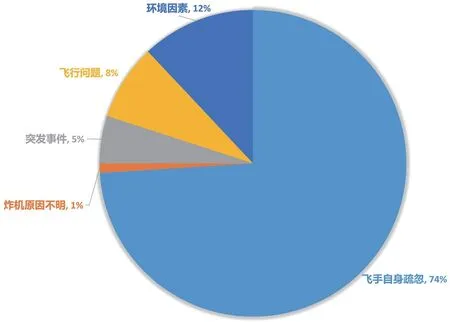
图1:炸机原因分析
通过研究可以发现,微型飞行器具有很多的优点,但回收困难一直是其最大的问题。当面临障碍物增多、天气因素不利、环境复杂等情况时,微型飞行器将会面临严峻的挑战。飞行器在作业过程中,一旦因为外界因素而坠落,不光会造成巨大的经济损失,还会给环境带来污染。因此,针对上述的问题,设计出能适用于障碍物多、天气因素不利、环境复杂等情况的微型飞行器显得很有必要。
2 研究现状
2.1 国内研究现状
相比于其他国家,我国飞行器研究起步较晚,始于上世纪60年代。当前,军用无人机的研究投入正持续性增长;民用无人机也在应用需求的带动下,正在逐步形成工业化的产业链。
2013年9月中航工业杯一第二届国际无人机飞行器创新大奖赛,清华大学单旋翼球形飞行器“Sky-Sphere X”参加创意赛。“Sky-Sphere X”采用轻木、航空层板、碳纤维等材料制作完成,起飞重量为600g。
另外,南京航天航空大学机电学院设计了一多旋翼球形飞行器,如图2。该飞行器小巧轻便,整体以七星瓢虫为设计灵感,具有折叠和使用两种状态。折叠时,该飞行器呈一球形,方便使用者携带;使用时,该飞行器机臂绕机身与机臂的连接轴向上展开,呈一四旋翼形态。该飞行器试飞情况良好,能完成两种状态之间的切换,以及在空中完成悬停、移动等功能,具有很好的创造性以及广阔的应用前景。

图2:多旋翼球形飞行器
2.2 国外研究现状
2011年10月20日,日本防卫省技术研究本部研发了一种球形飞行器(图3)。它能够穿梭于窄巷、在目标物上空定点悬浮、垂直起降和连续触地反弹。该飞行器的推进器有一层大面积镂空的球形外壳保护,那意味着它即使撞到墙上或掉落地面也不会受到损坏。该飞行器目前尚处于试验阶段,研究人员还在不断研究如何改进这款装置,在能够正式投入使用之前还需要克服许多困难。

图3:日本的球形无人侦察样机
瑞士洛桑联邦理工学院的研究人员近日研制出一款号称不惧怕任何碰撞的球形飞行器,其外形结构如图4所示。GimBall装备有具有保护作用的机械陀螺原理的被动旋转球笼外壳,它可以在碰撞时保持飞行器稳定。GimBall直径37cm,比篮球略大,质量370g,两支螺旋桨使它能够以5Km/h的速度飞行5min。它可以遥控飞行或是自主飞行,自主飞行时可以将航迹反馈给地面操作人员。瑞士洛桑联邦理工学院的研究人员在一片林地对GimBall进行实验,不论是撞到树上,在不平的地面上翻滚,还是飞跃树枝,都没有对飞行器特别是其内部元器件造成任何损坏。

图4:联邦理工学院的球形飞行器
通过上述国内外球形飞行器的研究现状,可以发现世界各国已经深刻意识到微小球型飞行器在军事、民用等方面的重要性,正积极开展该领域的研究。
3 结构设计
该球形飞行器的整体结构如图5所示。该飞行器结构简单,其外部为一个球形圆框,内部结构可分为动力系统、控制系统、避障系统等。

图5:球形飞行器整体结构图
3.1 球壳外形
该球形框借鉴陀螺元素,由八根截面为椭圆形的外形支架框纵向首尾连接而成,最上方的连接点处为一自动展翼装置;同时在机身下部绕机身横向布置一个支撑框,降低了重心,并增强机身的稳定性和刚度。
该球形外壳选用聚苯为材料,该材料密度小,强度大,耐磨性能优良。由于球形飞行器在飞行过程中易与外界发生碰撞,且在地面滚动前行时容易造成磨损,因此选用的材料应具备强度大以及耐磨性能优良的品质;同时,为了能使飞行器在海上漂浮,该球形外壳的密度不宜很大。
这种球形设计结构有很多的好处。首先,该飞行器内部结构完全被包裹在机身内,使得飞行器和障碍物发生碰撞时不易损坏。其次,由于其为一个球形,且体积小,因此在侦察过程中可以更好地避障,并且能很轻易地进入狭小地区,减小了被狭缝卡住的可能。当飞行器掉落至地面后,球形外壳可以滚动,实现地面滚动前进,并且可以通过控制动力实现再次起飞。
3.2 动力装置
该飞行器动力装置采用的是单桨结构,并且在螺旋桨的下面设立了四个相互垂直的舵面,与现在很流行的共轴双桨结构不同,且该飞行器尾部正中间设立了一尾桨。 四片弧形舵面分为两组,一组舵面的展向与飞行器尾部的水平支架的轴线平行(称A舵面),另一组舵面的展向与飞行器尾部的水平支架的轴线垂直(称B舵面),且两个舵面分别由两个舵机驱动偏转。共轴双桨结构的动力装置可以通过双螺旋桨的反向转动产生平衡力距,而该动力装置靠的是舵机驱动B舵面反向偏转,产生的气动力来平衡力矩。A舵面的同向偏转可以为飞行器平飞提供升力。
飞行时,飞行器顶端的螺旋桨旋转产生的反作用扭矩会使飞行器向与螺旋桨旋转的相反方向转动,为了避免机身转动,通常在飞行器的尾部装一尾桨,提供一个附加水平力,其力矩可与主螺旋桨给机身的反作用力矩相抵消。因此,该飞行器的尾桨可以更好地抵消反作用力,使飞行器能够更加稳定作业。
3.3 控制系统
该飞行器的控制系统以STM32单片机为控制芯片,用航空锂电池供电,电压调至输出5V,既可以直接与控制器连接,又可以给舵机供电。并对单片机进行起飞、降落、偏转等飞行算法的编写,实现飞行器的各个功能。
3.4 避障系统
近几年避障已成为各飞行器必不可少的功能。目前市场上的飞行器主要用到了下列几种避障技术:超声波避障技术、红外避障技术、激光避障技术和视觉避障技术。
超声波测距的原理是:从超声波发射器发出的超声波(假设传播介质为气体),经气体介质传播,遇到障碍物之后反射的超声波被超声波接收器所接受,将超声波发射与接收之间的时间与气体介质的声速相乘,就是声波传输距离,声波传输距离的一半是所测距离。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量;红外测距利用红外线传播时不扩散、折射率小的特性,根据红外线从发射模块发出到被物体反射回来被接受模块接受所需要的时间,采用相应的测距公式来实现对物体距离的测量;激光避障的测量方式很多样,有类似红外的三角测量,也有类似于超声波的时间差加速度;视觉避障即通过可见光,利用摄像头采集图像信息,然后分析障碍物信息,再做出决策。
该飞行器避障系统的主体是物体、红外发射器与CCD检测器,其原理如图6。在飞行过程中,红外线发射器会不断向周围发出红外线,当遇到物体时会发生反射,反射光线被CCD检测器接收后,会根据物体和CCD检测器垂直方向上的距离D以及反射角α,利用三角定理来计算出偏移值L,再将其发送给控制终端,由控制终端按照其偏移值按照公式以及对应的程序,计算飞行器与障碍物之间的距离,然后控制舵机

图6:红外避障系统
进行机翼的控制,使飞行器发生对应的偏移,由此完成智能避障,在其间需要进行调试,以保证能够正常避障。
4 创意功能实现
该球形飞行器能实现海上漂浮、空中定点悬停、地面滚动前进以及坠落后能通过控制动力实现再次起飞等功能。
借鉴车路体系振动方程建立了盾构隧道-地层振动体系模型。该模型分别将地铁列车及隧道地层系统视为两个子系统,并通过轮轨间的几何相容及力学平衡条件来实现车隧之间的耦合效应,然后将由此得到的运行列车轮轨作用力以外荷载的形式输入到盾构隧道-地层动力子系统中,从而进行振动响应分析。
4.1 海上漂浮
当飞行器在海上作业时,由于海上天气的极其不稳定,飞行器极易因大风等环境因素坠入海中,造成无法回收和环境污染等问题。为解决这一问题,该飞行器的球形外壳最上方的连接点采用一自动展翼装置(如图7)。
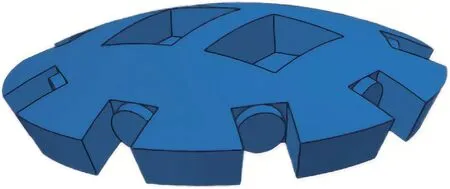
图7:自动展翼装置
该装置由小型电磁锁,电源,单片机(stm32)组成,如图8。当单片机接收到主控芯片发来的信号后,判断是否展开支架框,若需展开支架框,则发出高信号,控制小型电磁锁工作,收起锁舌,相应的6根支架框通过自身重力向外展开,剩下的两根支架框和飞行器尾部的水平支撑框均不动,留给飞行器做支撑点。

图8:自动展翼装置具体结构
展开后的形状如图9所示。该设计借鉴莲花的造型,展开后的球形外壳和底部的圆盘共同构成“莲花”的底座,使飞行器达到在海中漂浮的目的。

图9:展开后飞行器结构图
4.2 空中定点悬停
在理想条件下,即球形飞行器不受外界任何因素的干扰,悬停的关键在于保证飞行器螺旋桨转动所产生的拉力与球形飞行机器人机体所受到的重力平衡。根据牛顿第三定律,空气会给螺旋桨施加以大小相等且方向相反的反作用力矩,简称反扭矩。空气通过螺旋桨,将反扭力矩传递给机体,若不施加力矩加以平衡会使机体沿着螺旋桨的转动方向的反方向发生自旋。
因此,为了使球形飞行器能在空中定点悬停,需要解决反扭距造成的机体自转的问题,即需要产生一个和反作用力矩大小相等且方向相反的气动力矩。实现方式为调节舵机驱动B号舵面差动偏转,其转速和螺旋桨的转速相等,其偏转方向和螺旋桨的转动方向相反,以此来相互抵消产生的力矩,使机体所受到的合外力矩为零,从而实现空中稳定悬停。
4.3 地面滚动前进
当球形无人机在复杂且不利于飞行的空间内时,可以让其在地面滚动前进。当螺旋桨开启后,根据需求的不同,驱动两个舵机,分别调整A号和B号舵面的位置,使其产生不同方向的气动力,实现球形无人机运动和姿态改变。球形无人机可以完成不同的运动和姿态变化,让球型无人机可以沿地面滚动前进或越过障碍物,使该球形无人机具有极高的灵活性和操纵性。
4.4 坠机后再次起飞
当飞行器在空中受到撞击等外界因素导致坠落,该飞行器可以实现再次起飞功能。实现方案是设置后备电源,当飞行器电源出现问题或撞击导致原电源与控制连接出现问题时,使其自动启动,保证飞行器能够在坠机后再次起飞,防止飞行器遗失。
在飞行器启动后,持续检查电源是否正常进行工作,若电源未正常工作时,则自动选择使用备用电源,连通备用电源,再次使飞行器起飞,防止飞行器回收困难。
5 结语
本文以飞行器在侦察过程中容易因外界碰撞和不利的天气因素造成损坏为契机,提出了一种单桨结构的创意球形飞行器,并介绍了飞行器各系统的基本组成,设计了几种富有创意的功能。目前只是对该球形飞行器有了一个创新的设计,但仍然具有很大的优化空间,还需要对球形飞行器的各项结构、功能进一步研究和优化,并且深度研究其控制算法,使其具备优良的环境适应能力。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器装备工程学报(2021年12期)2022-01-11
航空发动机(2020年3期)2020-07-24
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年2期)2018-04-18
兰台世界(2017年10期)2017-06-01
小朋友·快乐手工(2015年5期)2015-06-06
飞行力学(2015年5期)2015-03-15
