
无人物流车路径跟踪控制算法研究
2022-07-06 03:57甘鑫覃高峰何静如何逸波林智桂
中国储运 2022年7期
文/甘鑫 覃高峰 何静如 何逸波 林智桂
工厂无人化是智慧工厂事实的重要体现,工厂物流的无人化则是实现工厂无人化的关键技术,而车辆的路径跟踪技术是无人物流车辆驾驶系统的核心技术之一。本文首先介绍车辆路径跟踪算法的研究进展,以物流车辆为载体,阐述无人物流车辆自动驾驶系统的搭建以及路径跟踪算法在车辆中的应用情况。针对无人物流车辆低速、固定场景、低成本的设计特性,本文提出采用纯跟踪控制的综合控制策略,考虑车辆横纵控制,实现对无人物流车辆的稳定跟踪控制。根据实际物流运行验证,车辆所使用的控制逻辑算法能够满足工厂物流系统12小时持续稳定运行工况。
1.引言.
车辆无人驾驶是目前研究的热点领域,目前针对封闭厂区的特殊场景以及可以实现完全无人化的点对点车辆自动驾驶,如厂区物资运送的无人化物流系统。实现厂区物流无人驾驶能够提高厂区自动化、智能化,保障员工工作环境、提高物流效率、减少厂区物流成本。无人物流车辆主要采用具体驱动装置的车辆作为牵引车辆,牵引车后使用托挂钩装置挂载多个物料拖车组成。为了达到灵活转向的目的。相对于一般乘用车,无人物流牵引车由于较短的前后轮轴距,导致车辆对于前轮偏角的变化更为敏感,对车辆的横向控制精度、控制模型的准确性、稳定性要求较高。路径跟踪控制是无人物流车辆实现的核心技术之一,即通过获取车辆实时规划的实时行驶轨迹,使用有效的路径跟踪算法实现对车辆的控制,以达到车辆行驶在正确路线上的目的[1]。传统的跟踪控制算法如滑模控制[2]、模糊PID控制[3]等,随着控制技术的发展,衍生出更为智能的车辆控制方法,如线性二次型调节控制[4]和模型预测控制[5,6]等。本文主要研究厂区物流车辆无人化控制中车辆路径跟踪控制的相关技术。针对无人物流车辆的运行特点,本文提出采用嵌入式车辆控制器作为中央主控系统的方案,在此方案基础之上,需要考虑车辆考虑控制系统的低算力负载消耗,同时保证车辆控制的稳定性以及精确性。
2.无人控制系统设计.
通过充分考虑无人物流车辆无人驾驶系统的较高实时性、较为苛刻的负载分配限制,本文设计的基于嵌入式芯片和LINUX系统的DDS通信框架,实现了各模块之间毫秒级的数据时间同步,满足各模块运行实时性能的要求。无人物流车辆采用的自动控制系统架构如图2-1所示。

图2-1无人驾驶系统框架示意图
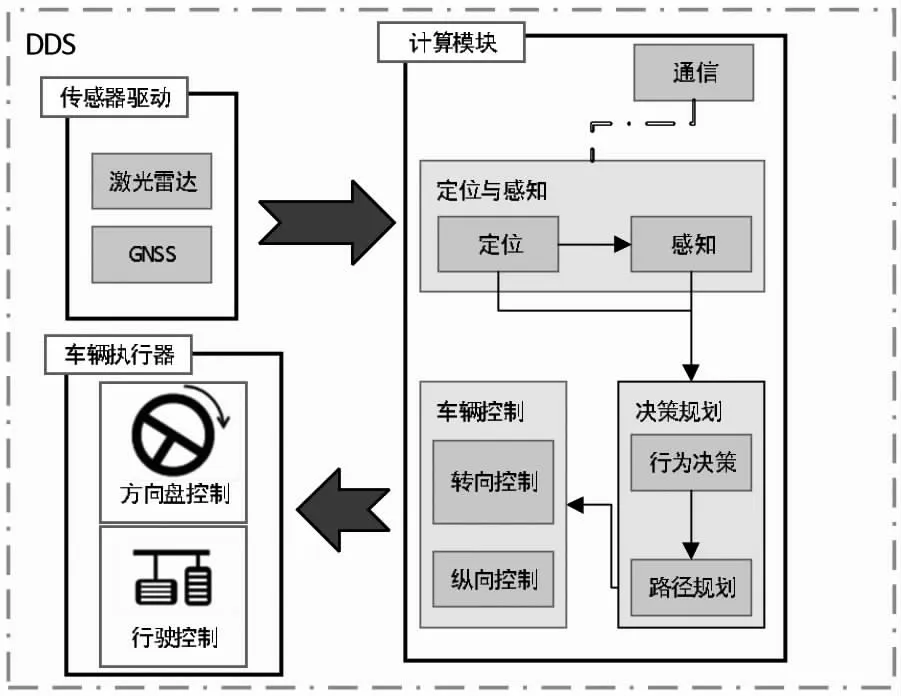
图2-2无人驾驶系统各模块介绍
在无人驾驶系统架构之上,便可以搭建无人驾驶系统的各功能模块。无人驾驶系统各系统模块的工作数据流如图2-2所示。传感器驱动程序将车辆传感器硬件采集到的环境信息数据发送至车辆局域网络内。车辆环境感知可分为自车位置识别以及障碍物识别,通过获取车辆所在位置的3D点云地图以及GNSS-RTK信号,使用SLAM算法匹配融合,计算得到车辆当前的实时位置数据;结合激光雷达的三维点云数据,障碍物感知模块可识别周围动态、静态障碍物轮廓、运动方向、速度等数据信息。通过获取车辆自身的位置数据、周围障碍物数据,车辆决策规划模块可进行车辆运动行为判断以及行驶路线轨迹规划,由跟踪控制模块根据局部行驶路径进行最终车辆执行器执行数据计算,获得最终的车辆执行信号,通过CAN总线端口下发至车辆执行器,完成车辆的实际控制。
3.无人物流车辆跟踪控制算法设计.
无人物流驾驶系统的路径跟踪算法已有较多的研究,针对车辆横向控制精度与控制稳定性能问题。本文提出使用纯跟踪算法进行车辆横向控制。目前主流的横向控制算法分为两大类:基于模型的预测控制方法、基于几何追踪的控制方法。相较于基于模型的控制方法,纯跟踪法只需要构建车辆的单车运行学模型,使用较低的计算算力便能够完成车辆前轮转向角度的计算。本文基于阿克曼转向车辆为研究基础,阐述纯跟踪路径跟踪控制算法的设计与实现过程。纯跟踪算法以车辆后轴的车辆控制参考点,构造车辆自行车模型,如图3-1所示。假设车辆在单一时刻车辆转向行驶轨迹为圆弧轨迹,即车辆可以沿着一条目标点P的圆弧行驶。假设车辆需要跟踪的下一个目标点为P1(Px1-Py1),目标点位于车辆行驶的参考轨迹内。假设ld为车辆当前位置到目标点P的直线距离;α为车辆目前姿态与目标点的夹角;R为车辆转向半径,根据几何计算,能够得到


图3-1车辆自行车模型
4.实车运行情况.
在上汽通用五菱有限公司柳州河西基地,采用本文设计的无人物流车辆控制系统的物流车辆以及实现了常态化运行测试,车辆无人化运行能够满足12小时的稳定运行,如图4-1所示,为车辆实际运行过程图片。目前车辆运行线路单圈总长为2.3公里,车辆无避让运行速度为15km/h,单圈运行时间约为10-20分钟,满足厂区内车间物料运输要求。经过实车单次测试,车辆实际运行5圈物流线路,完成约10km的路线行驶,车辆实际控制一致性较好,横向控制精度达到5cm以内。

图4-1无人物流车辆实际运行
5.结论.
本文针对厂区物流车辆的无人化进行研究与应用,设计并采用嵌入式的车辆主控方案,搭建车辆的无人驾驶系统,使用DDS协议作为无人驾驶系统的底层通信协议,实现的在嵌入式系统中的数据实时性传输、较低算力和负载消耗的自动控制系统搭建。本文提出采用纯跟踪横向控制算法逻辑进行控制算法设计。采用该方法能够有效减少控制模块对系统资源的消耗,同时能够实现车辆长时间稳定运行。经过实车测试,表明该控制方法能够实现车辆12小时的持续运行,同时车辆控制的一致性较好,满足了厂区车间物流的实际使用要求,对厂区物流成本控制、效率提高等均有较大的帮助。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
选煤技术(2022年2期)2022-06-06
昆钢科技(2022年1期)2022-04-19
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
北京航空航天大学学报(2017年1期)2017-11-24
西江月(2017年4期)2017-11-22
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年1期)2014-05-09
海外英语(2013年11期)2014-02-11
