
大功率音圈电机数字闭环控制的温度补偿方法
2022-07-06 07:14:34李学文吕勇刘力双王艳林
北京信息科技大学学报(自然科学版) 2022年3期
李学文,吕勇,刘力双,王艳林
(北京信息科技大学 仪器科学与光电工程学院,北京 100192)
0 引言
音圈电机是一种特殊形式的直流驱动电机,具有高速度、高加速度、快速响应等优良性能,在精确指向、激光通信、像移补偿等领域,常被用作精密电流驱动元件[1]。在航空航天领域,为实现精确的定位指向,对音圈电机驱动电路的控制精度和稳定性提出了更高的要求。为了保证电流控制的准确性,闭环控制系统中的反馈环节至关重要,对电流采集电路的精度要求更高。
国内外学者对精密电流的驱动控制进行了很多研究。郑琦琦等[2]分析了电磁干扰对电机驱动系统的影响,通过实验得出了一种电磁干扰更小的电机驱动控制策略。程涛等[3]对脉冲宽度调制(pulse width modulation,PWM)过程中的死区效应进行了分析,提出一种空间矢量脉宽调制(space vector pulse width modulation,SVPWM)逆变器死区效应的时间补偿方法,进一步提高了电机的电流控制精度。为适应大电流的工作条件,Dudzik[4]提出了一种两级电流源概念,Wang等[5]在此基础上提出了一种基于双闭环的双极性电流源,具有0.1%的高稳定性能以及±2 A的输出范围,然而其负载较小,无法应用于大功率情况。为降低取样电阻在大功率情况下的负载效应,张钟华等[6]提出了一种精密电阻的实现方法,通过多个小型电阻并联的方式,降低其负载系数,使其阻值变化量达到10-9量级。潘仙林[7]对四线制高精密电阻的时间常数测量进行了深入研究,对电阻的相角偏差进行了测量,测试结果表明频率达到200 kHz时,其相角偏差的不确定度小于100 μrad。
在大功率工作环境下,音圈电机控制系统的电流控制精度受取样电阻的温漂影响较大,目前还没有很好的解决方案。本文研究了大功率音圈电机数字闭环控制的温度补偿方法,用于抑制大功率情况下温度漂移对电流控制精度的影响。通过引入温度补偿电路,实时检测取样电阻的温度变化,对输出电流进行修正补偿,达到输出稳定电流的目的。
1 方法介绍
1.1 音圈电机
音圈电机通常由线圈、磁轭和永磁铁构成,其工作原理为通电线圈在磁场受到电磁力作用沿磁场法线方向运动,电磁力的大小与电流大小成正比,可以通过控制驱动电流的大小和方向,实现电机出力的大小和方向控制。
根据安培定律,音圈电机的电磁力F为
F=BIL=NBILi
(1)
式中:N为线圈匝数;B为永磁体的磁感应强度;I为线圈中电流的大小;L为磁场范围内线圈的总长度;Li为磁场范围内每一匝线圈的长度。可见音圈电机的出力与输入电流的大小成正比。输入电流的精度直接影响到电机出力的稳定性,从而间接影响到控制对象的速度、加速度和位移,影响到其动态性能。目前大功率音圈电机控制要求驱动电路能够输出0~3 A的电流,输出功率达到百瓦级别,同时输出精度达到0.1%。
1.2 闭环驱动控制
音圈电机的高精度电流控制采用位置环、速度环、电流环三环嵌套的闭环控制形式,其结构如图1所示。其中电流环为最内环,速度环为中间环,位置环为最外环,三环共同作用以达到准确可靠的控制效果[8]。
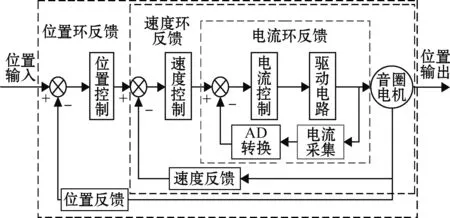
图1 三闭环控制系统结构
电流环反馈的控制效果对系统的控制精度起着至关重要的作用。其原理是利用取样电阻采集输出电流,将电流值反馈回电流处理环节,对输出电流进行实时修正,达到精确稳定输出的目的。
1.3 电流取样检测
在电流环反馈回路中,电流采集电路的测量精度直接影响电流环的控制效果。常见的电流测量方法有分流器法、法拉第电感器法、霍尔传感器法和法拉第磁光效应法。分流器法因其体积小、测量带宽高、理论精度上限高等优点,广泛应用于音圈电机高精度电流测量环境[9]。因此,本文采用分流器作为电流采集模块,通过精确测量取样电阻两端的电压U,根据欧姆定律算出流经取样电阻的电流I。
1.4 温度补偿
分流器法的测量精度取决于取样电阻的稳定性,取样电阻阻值随着温度的变化发生漂移,影响电流测量精度[10]。温度的影响主要来自于取样电阻的负载效应,即电阻温度会随着流经电流的大小发生变化,电流越大,电阻的温度越高,电阻的阻值越大。只有测量出阻值的实时变化,才能确保电流测量的准确性。
温度补偿电路的组成结构如图2所示。
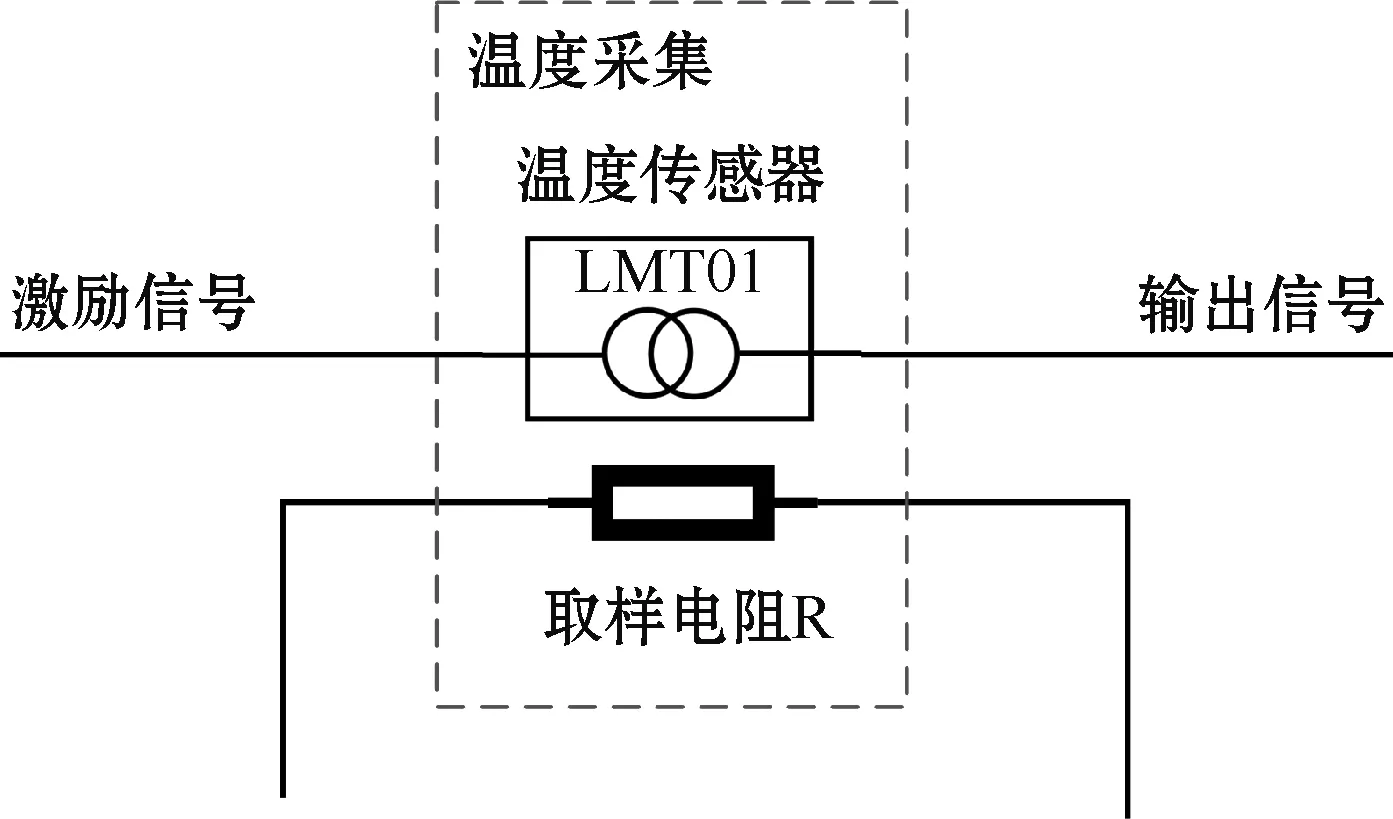
图2 温度补偿电路
选用高精度双引脚温度传感器LMT01-Q1测量取样电阻的温度,为确保温度测量的准确性,将温度传感器用导热性良好的硅胶垫片贴在取样电阻上,最大限度地保证传感器检测的是取样电阻的温度变化。
所选取样电阻为四线制低温漂金属铂电阻,工作温度范围为25~40 ℃,取样电阻的阻值随温度变化的函数关系为R=f(t,As,Bs)。其中:t为取样电阻的温度值,可以通过温度传感器测量获得;As、Bs为温度系数,可以通过标定的方式求得。
引入温度补偿的闭环控制流程如图3所示。首先接收上位机发送的目标电流值Itarget,查表转换为AD值,记为IAD,读取实测电流值Im经过AD转换后的值,记为IAD0,读取温度传感器的温度值t,根据标定方程得出此时的电阻值Rt,Rt与上一次求得的阻值RL的比值即为温度补偿系数,对实测电流值的AD值进行修正,修正后IADt=IAD0×RL/Rt,计算IAD与IADt的偏差,送入PID控制器,输出驱动电压控制音圈电机,完成闭环控制。以目标电流值Itarget=50 mA为例,实测补偿数据如表1所示。
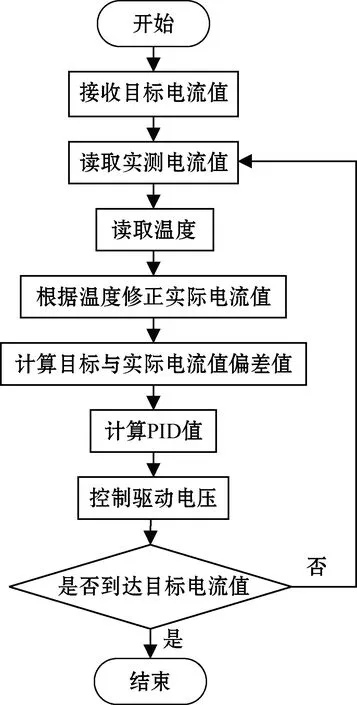
图3 引入温度补偿的闭环控制流程

表1 实测补偿数据(Itarget=50 mA)
2 实验及分析
2.1 电阻温度系数标定
通过测量取样电阻的电流—温度—阻值的对应关系,对取样电阻的温度系数As、Bs进行标定。取样电阻值为0.013 Ω,利用恒压源为电阻提供1 mV的恒定电压,用数字万用表34401A测量取样电阻的电流,用温度传感器测量取样电阻的温度值。根据取样电阻的实际工作温度,将标定温度范围设置为0~80 ℃。利用高低温实验箱进行温度控制,记录下温度传感器数值t,数字万用表电流值Im,通过欧姆定律计算出电阻值R,电阻随温度变化曲线如图4所示。
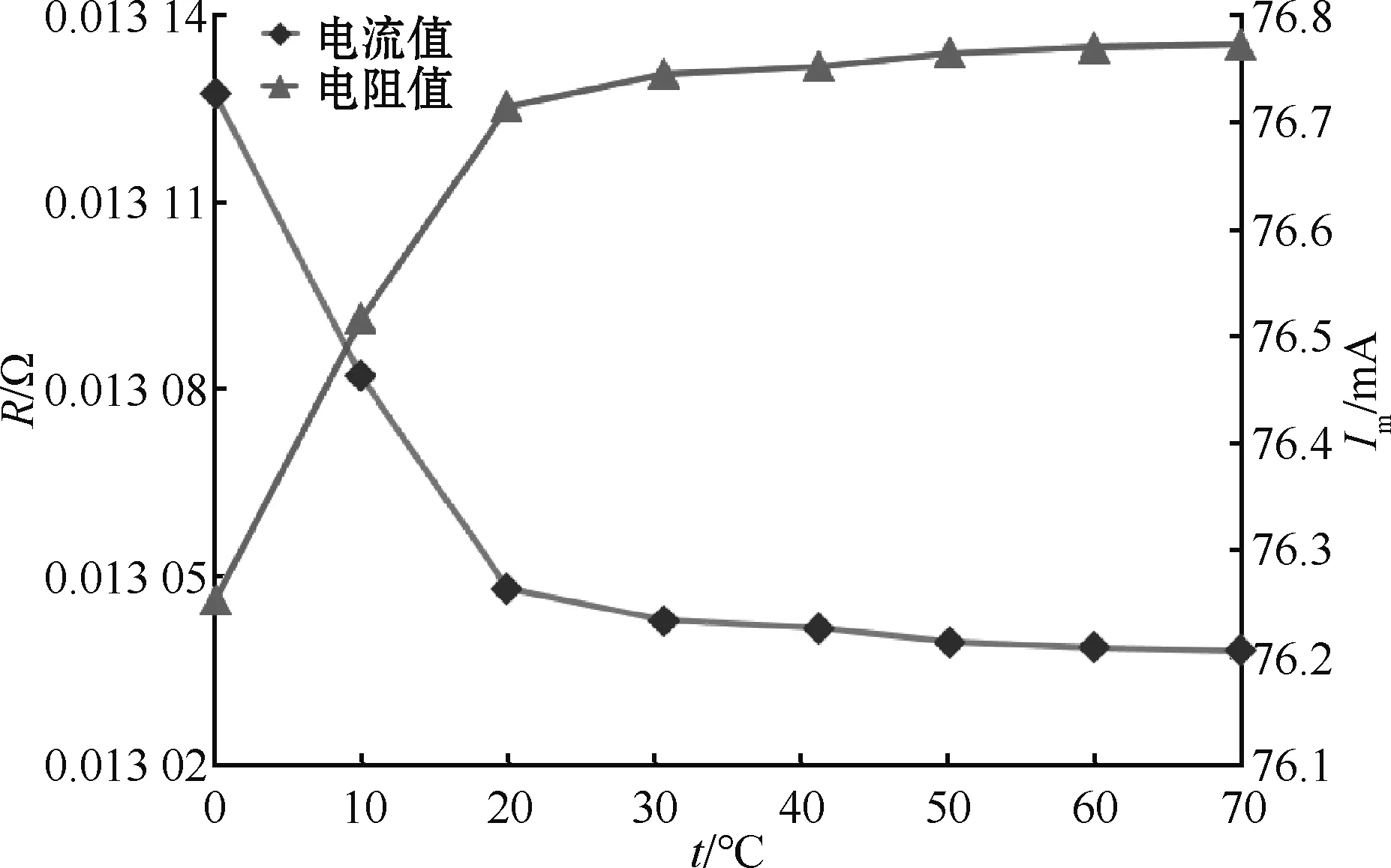
图4 电阻温度-电流-阻值标定曲线(恒压1mV)
其中,三角形标记线为电阻变化曲线,菱形标记线为电流变化曲线。从图中可以看出,随着温度变化,电阻的阻值呈现非线性变化。
采用最小二乘法对数据进行处理分析,得出电阻的温度漂移特性方程:
R=R0(1+Ast+Bst2)
(2)
式中:R0=0.013 06 Ω;As=2.656×10-4;Bs=-2.666×10-6。
在常温条件下,利用恒流源输出0~3 A的恒定电流,利用纳伏表测量取样电阻两端的电压U,用温度传感器记录取样电阻的温度t,用欧姆定律计算出电阻值R,取样电阻与温度变化曲线如图5所示。
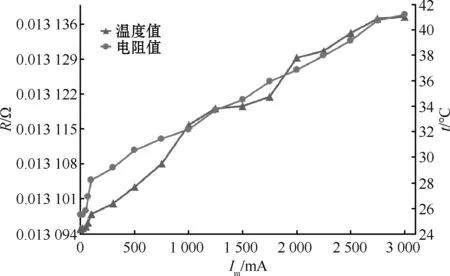
图5 电阻温度-阻值变化曲线
从图5中可以看出,随着电流的增加,电阻的温度从室温24 ℃增长至41 ℃,电阻的阻值也随之增加,且电阻值增量与图4中20~40 ℃阻值增量一致,因此可以利用式(2)对电阻阻值进行实时修正,利用补偿算法确保电流输出稳定。
2.2 温度补偿测试
为验证温度补偿效果,采用32 位浮点微控制器单元TMS320F28377S作为系统的主控芯片,选用大功率运算放大器OPA549为电机提供驱动电压。电流采集部分采用内部增益较大的芯片,以提高采样精度。采用高精度温度传感器,对取样电阻的温度进行测量。用LabVIEW编写上位机控制软件,通过串口实现与驱动模块的通信,选用34401A数字万用表作为实际电流采集设备,在实验室条件下,搭建测试平台。由于环境温度对阻值的影响缓慢,温度影响主要来源于电阻自身的发热,可以忽略环境温度的影响。在0~3 A电流输出范围内选取10个典型电流值进行实验验证,对比温度补偿前后电流的绝对误差ΔI。其中绝对误差为多次测量取平均后的电流值与电流指令值的差值。
图6为温度补偿前后电流输出的对比图,图(a)左上角为1∶1 000局部放大图,图中方形标记线为温度补偿前的电流输出曲线,三角形标记线为温度补偿后的电流输出曲线。由于补偿前后绝对误差偏差较大,为便于观察变化趋势,在图(b)中将补偿前的绝对误差数据统一缩小10倍,和补偿后的数据设置在同一量程内。可以看出,经过温度补偿后,系统整体输出电流的精度得到了明显的提升,误差从最大20.1 mA降到1.65 mA,全工作范围内误差均保持在0.1%以内,实现了系统的高精度电流输出。
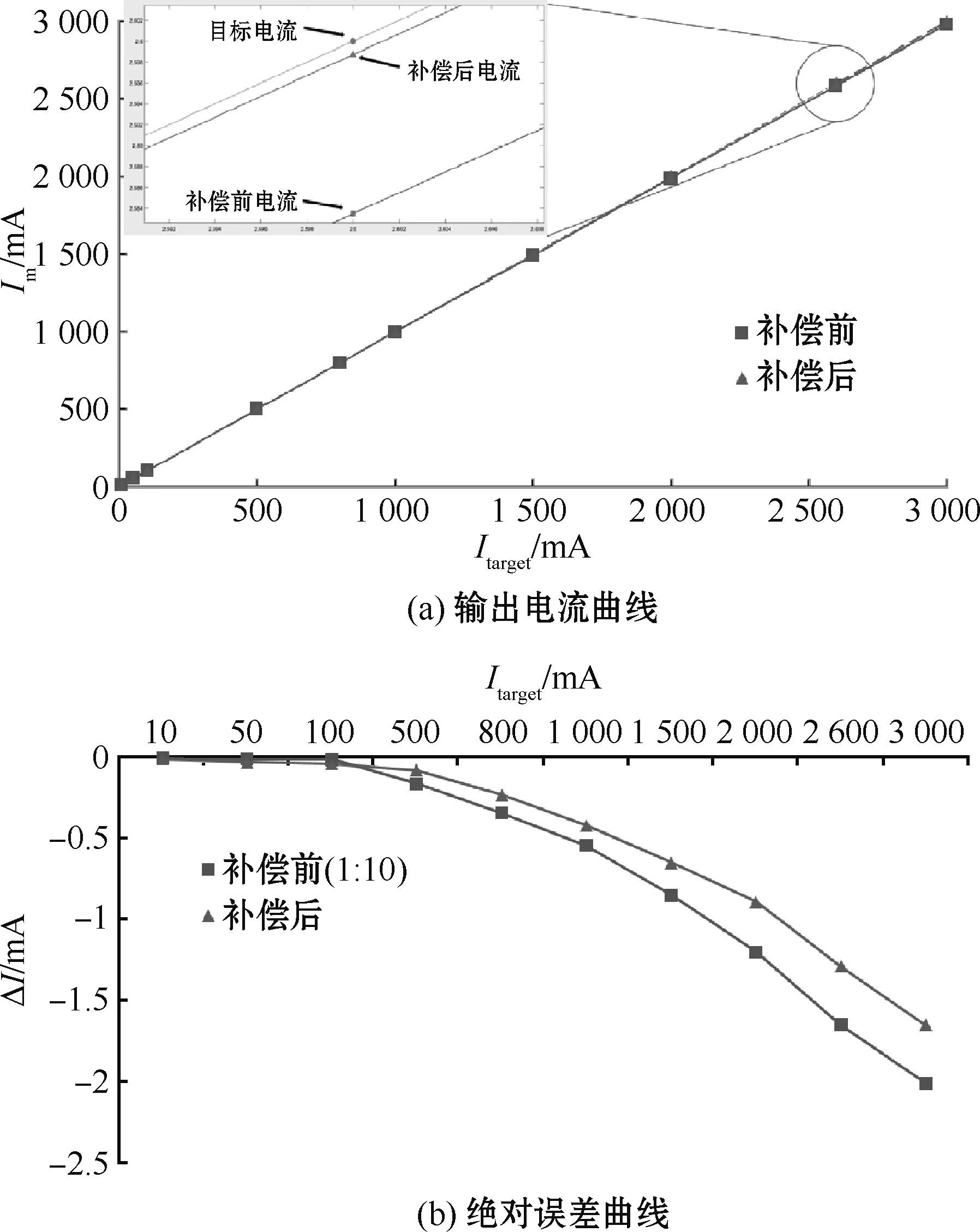
图6 温度补偿前后电流输出对比
为验证控制系统的稳定性,选取最大输出电流3 A作为验证对象,让系统长时间工作并记录下输出的电流值,观察电流稳定性。图7为实验测试结果,其中虚线为电流指令值3 000 mA,实线为±2 mA的偏差界限。经过温度补偿后,在输出3 A的情况下,经过90 min的测量,输出电流误差保持在±2 mA以内,且可以长时间保持很好的输出精度,确保了系统的稳定性。
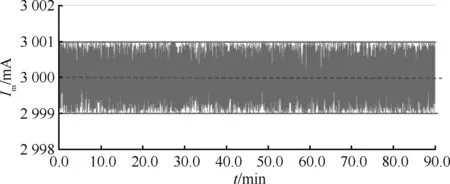
图7 电流稳定性测试结果
3 结束语
为了解决大功率音圈电机驱动控制过程中,取样电阻温漂对电流控制精度的影响,研究了一种数字闭环控制的温度补偿方法。将此温度补偿方法应用于大功率音圈电机驱动控制系统当中。温度补偿前后,在输出电流为3A的情况下其最大输出误差从0.67%降到0.06%,全输出范围内误差均保持在0.1%以内,大幅度降低了电阻温漂对输出电流精度的影响,对于大功率音圈电机高精度电流控制具有一定的参考价值。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
日用电器(2022年4期)2022-05-26 03:51:28
现代仪器与医疗(2021年6期)2022-01-18 03:22:48
现代仪器与医疗(2021年1期)2021-06-09 05:53:58
大众科学·上旬(2020年2期)2020-03-30 03:51:17
测控技术(2018年1期)2018-11-25 09:43:30
测控技术(2018年1期)2018-11-25 09:43:24
电子测试(2018年18期)2018-11-14 02:30:32
传感器与微系统(2018年7期)2018-08-29 00:44:36
电子制作(2018年11期)2018-08-04 03:25:58
