民用飞机湍流边界层噪声分离技术的应用
2022-07-05 08:22李才华张绍云杨振超
航空发动机 2022年2期
李才华,张绍云,杨振超,刘 鹏
(中国商飞民用飞机试飞中心,上海 201323)
0 引言
在飞行状态下,湍流边界层脉动压力是飞机舱内噪声的主要来源之一,其激励飞机蒙皮结构,并通过机体结构复杂的传递路径引起结构振动和舱内噪声,研究其特性对舱内噪声优化设计以及声载荷预测有着重要作用。
在民用飞机领域,国外对湍流边界层噪声的研究较多。Bhat对波音737飞机进行表面声载荷飞行测试,获取了脉动压力功率谱密度;空客公司在A320飞机上进行了一系列噪声相关的飞行测试,获取了不同声源特性及其传递路径,用以修正舱内噪声预测模型。
机体外表面声载荷包含湍流边界层噪声和发动机噪声。采用相干函数方法可分离出湍流边界层噪声。这种信号处理技术首先由Chung提出,在实验室使用3个布置成三角形的麦克风测量同一声源信号,并对每个麦克风加载独立的气流用于模拟风噪,采用相干函数方法将风噪信号从总声压值中分离出来。Cyrille在波音777飞机上进行了表面声载荷飞行测试,并识别出发动机噪声;许坤波等在管道内布置2圈环形麦克风阵列,利用互相关方法得到单音及宽频噪声结果。
湍流边界层预测模型主要分为2大类:一类是壁面压力谱模型,将边界层附近脉动压力的能量按频率分解,得到用于估算脉动压力的功率谱密度,其主要研究者有Robertson、Efimtsov、Rackl等、Goody;另一类是波数-频谱模型,将能量按波长分解,通过大量的试验拟合出经验表达式,其主要研究者有Corcos、Chase、Mellen等。Teresa对 以上 不同的模型进行介绍和对比。对于壁面压力谱模型,在同种工况下,采用Efimtsov和Rackl-Weston模型计算得到的均方压力最大,Goody模型次之,Robertson模型最小;对于波数-频谱模型,采用Corcos和Mellen Elliptical模型在低波数段得到边界层噪声过大的类似预测结果,根据试验结果对Chase模型进行了大量修正,准确性较好。
目前,中国在民用飞机上进行机体表面声载荷测量的飞行试验不多,湍流边界层噪声分离技术的研究也相应较少。本文在飞行试验中获得机体外表面声压数据,采用相干函数方法分离湍流边界层激励,并与Robertson模型计算结果进行对比。
1 相干函数方法
以1个单输入和单输出组成的简单线性系统(如图1所示)为例,对相干函数进行描述。

图1 简单线性系统
假设输入信号为(),输出信号为(),()为频响函数。()和()对应的自谱分别为G()和G (),二者的互功率谱为G()。则相干函数为
在式(1)中,对于所有的频率都有

如果()与()完全不相关,那么相干函数等于零;如果在0~1之间,那么计算出()信号里与()相关的部分,用G()表示

如果1个测试系统有2个麦克风传感器(如图2所示),定义传感器1的信号为(),由相关信号()和不相关信号()组成;同样对于传感器2的信号(),由相关信号()和不相关信号()组成。
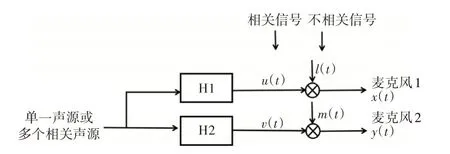
图2 2个传感器组成的系统
()与()间的相关函数表示为

式(5)中有2个未知数和,其求解需引入第3个传感器信号。3个传感器组成的系统如图3所示。
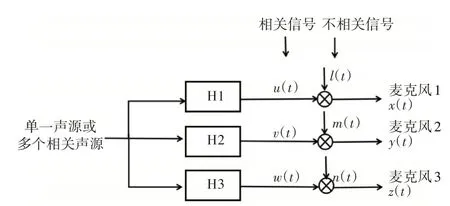
图3 3个传感器组成的系统

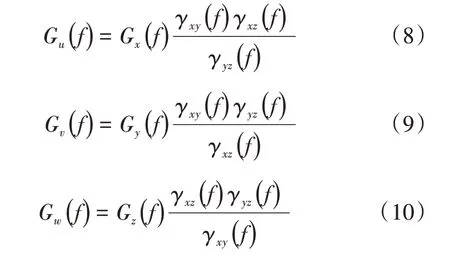
式(8)~(10)等号左边表示各传感器信号中包含的相关成分,可视为相关成分的自谱,详细的推导过程见文献[5]。
在工程应用中,可以先将相关成分的自谱转换为1/3倍频程谱,并根据声压计算公式得到不相关成分的1/3倍频程谱

式中:()为信号总的1/3倍频程声压级频谱;()为信号中相关成分的1/3倍频程声压级频谱。
2 Robertson半经验模型
Robertson半经验模型基于Lowson模型发展而来。Lowson公式计算的功率谱在低时有些偏低,而在高时下降太多,因此Robertson模型对Lowson公式进行了改进。
相比于其他壁面压力谱模型,Robertson模型在不同马赫数范围内更能反映实验测量结果。而近年来的模型(如Goody模型)基于低速不可压缩流实验数据提出,可能不适合高飞行马赫数。并且,相比于其他模型,Robertson模型更为简单,参数容易获取,便于应用。
Robertson模型使用了边界层位移厚度δ和当地来流速度U作为归一化参数


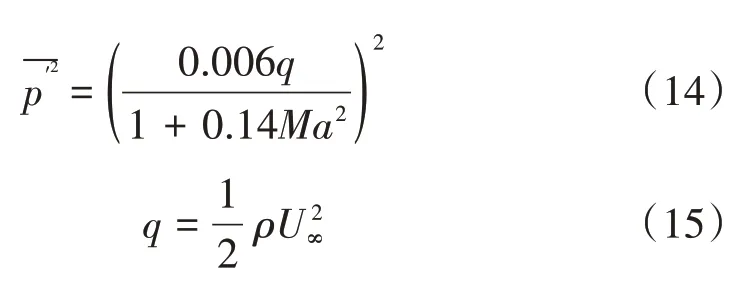
式中:为来流马赫数;为来流动压力;为来流空气密度。
机体表面位移边界层厚度δ的计算使用Bhat的方程

式中:为特征长度,定义为表面声压传感器距离机头的轴向距离;为当地雷诺数。
3 试验介绍
飞行试验在国产某型飞机上进行,使用B&K4948传感器测量机体外表面声载荷。传感器直径为20 mm,厚为2.51 mm,用金属圆盘固定,整个传感器结构(含金属圆盘)直径为30 mm,传感器实物照片如图4所示。传感器频率测量范围为5~20000 Hz,动态噪声变化范围为55~160 dB。橡胶圆盘套在传感器结构(含金属圆盘)上,其作用主要是尽可能消除传感器与机体表面阶差引起的附加风噪。橡胶圆盘内直径为30 mm,外直径为100 mm。

图4 表面声压传感器(含金属和橡胶圆盘)
为了保证传感器在飞行过程中不脱落,使用厚度约为1 mm的双面胶将传感器和圆盘结构粘贴在机体表面,最后覆盖1层薄的航空铝箔胶带加固。传感器导线通过1个改装的舷窗穿入客舱内部,连接同一数采系统,确保传感器数据之间记录的同步性,声压数据采样率为60 kHz。飞行参数通过机上飞参记录器存储,与噪声数据时间同步。试验前后对声压传感器进行标定。3个表面声压传感器在机体等直段外表面形成三角布置结构。其中1、2号传感器在机体上沿航向布置,传感器中心点之间距离为20 cm;2、3号传感器沿垂向布置,传感器中心点之间距离为20 cm。2号传感器中心点沿航向距离机头12.55 m。传感器在机体表面的安装位置如图5所示,在飞机上实际安装的照片如图6所示。
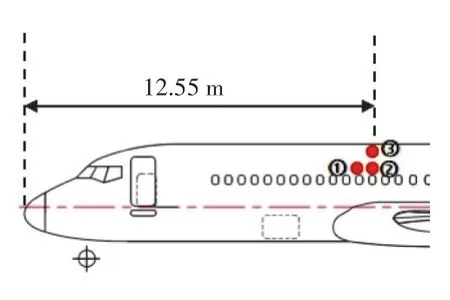
图5 表面声压传感器在飞机上的安装位置

图6 表面声压传感器实际安装照片
4 试验与计算结果对比
飞行试验在10668 m(工况1)和9144 m(工况2)高度上进行,马赫数均为0.78。试验时避开云雨天气,并只在直线稳定飞行时采集数据。
飞机在到达指定高度和目标速度、状态稳定后,由机上工程师记录声压数据,对每个工况截取1 min时长的数据进行分析。
湍流边界层激励的1个重要特性是沿着飞机航向弱相关,沿着飞机垂向完全不相关,由此认为机身表面各点处湍流边界层激励是不相关的成分,而发动机噪声被认为是相关成分。这样,可以使用相干函数的方法进行湍流边界层噪声分离。
在得到3个表面传感器的声压数据后,使用傅里叶变换计算各通道时域信号的自功率谱,频率分辨率为0.5 Hz。计算两两信号之间的互功率谱,为复数形式,通过式(1)得到相干函数。根据式(8)~(10)得到各传感器的相关成分即为发动机噪声,并转换成1/3倍频程声压谱。最后通过式(11)得到湍流边界层噪声,以1/3倍频程谱显示。
在工况1、2下1号表面传感器信号总的噪声和各分量的对比如图7所示。从图中可见,在巡航状态下,湍流边界噪声的贡献量要大于发动机噪声的。总声压在中心频率为1000 Hz附近时达到最高,并在频率越高时,衰减越快。
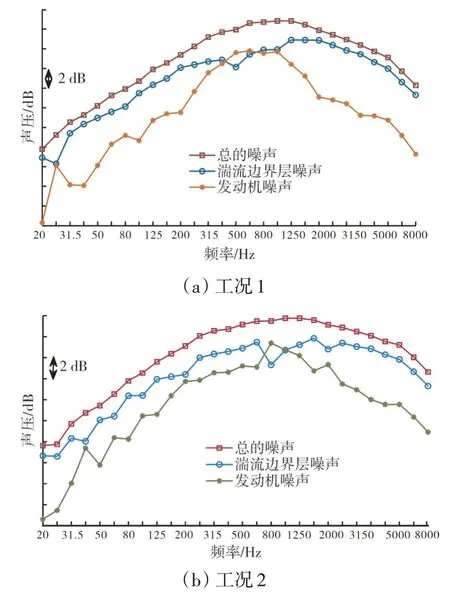
图7 1号传感器湍流边界层噪声的分离
本文使用Robertson模型计算湍流边界层噪声,用到的计算参数见表1。其中飞行高度、马赫数和真空速通过飞参记录器获取,运动黏度参照飞行大气参数标准。边界层位移厚度、动压、特征频率和均方脉动压力根据式(13)~(17)计算得到。
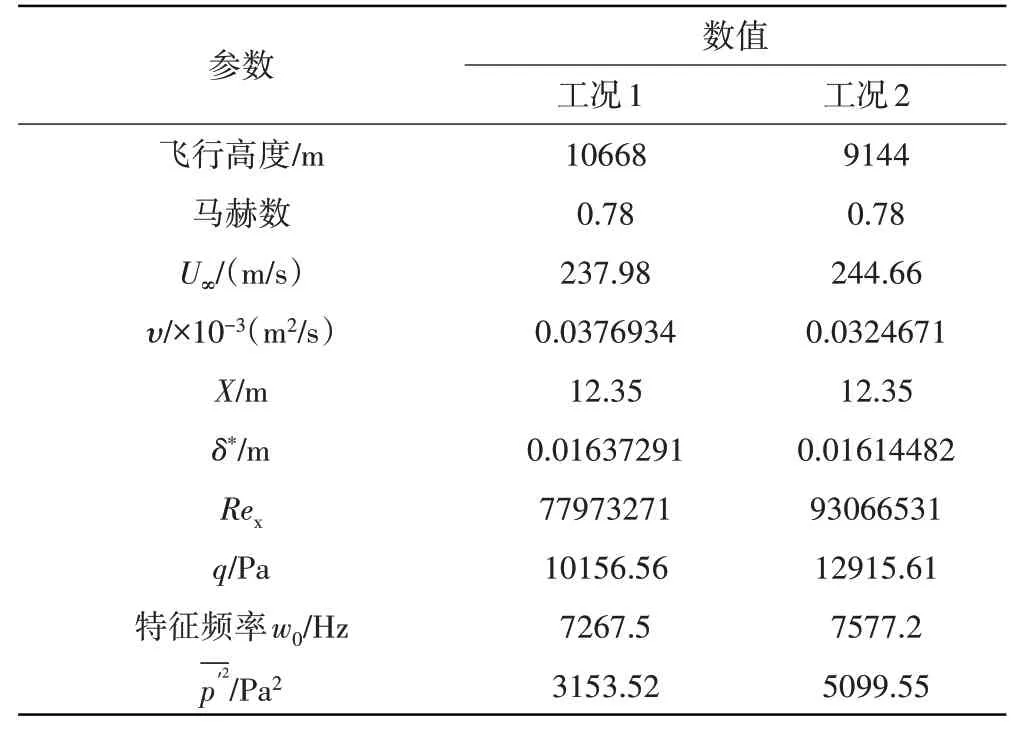
表1 Robertson模型计算参数
在工况1、2下Robertson模型的计算结果与试验结果分离得到的1/3倍频程谱对比如图8所示。从图中可见,在中心频率为20~10000 Hz时,二者结果较为接近,最大相差约2 dB。频率较高时,试验结果分离得到的湍流边界层噪声衰减程度要大于Robertson模型的计算结果。

图8 1号传感器试验和Robertson模型计算结果对比
计算表明在总声压级上二者结果接近,相差约2 dB。结果见表2。
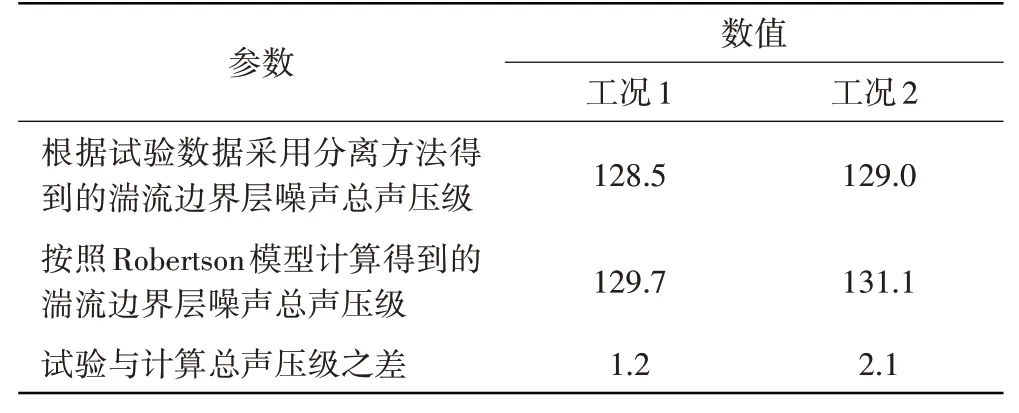
表2 总声压级对比 dB
5 结论
(1)采用分离技术得到的湍流边界层噪声与Robertson模型计算结果相比,总声压级相差约2 dB。在中心频率为20~10000 Hz时,利用分离技术得到的湍流边界层噪声与Robertson模型计算的1/3倍频程谱较为相近;
(2)在典型巡航状态下湍流边界层噪声的贡献量要大于发动机噪声的。
猜你喜欢
电脑报(2022年24期)2022-07-01
小学阅读指南·低年级版(2020年11期)2020-11-16
饮食科学(2016年7期)2016-07-27
杂文选刊(2015年12期)2016-01-12
新青年(2015年2期)2015-05-26
国外科技新书评介(2014年12期)2015-01-05
国外科技新书评介(2014年5期)2014-12-17
家庭科学·新健康(2014年10期)2014-10-24
意林(2014年17期)2014-09-23
国外科技新书评介(2009年7期)2009-09-01