强横风作用下车辆半主动悬架模糊PID控制研究
2022-07-04 02:25袁传义唐金花
噪声与振动控制 2022年3期
袁传义,张 焱,唐金花
(江苏理工学院 汽车与交通工程学院, 江苏 常州 213001)
悬架的作用是传递作用在车轮和车架之间的力和力矩,同时缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动。由于车辆行驶环境复杂多变,尤其是在空旷无人的戈壁滩、高速公路桥隧路段、山谷隧道出口以及临崖公路很容易出现强横风,操作稍有不慎,车辆很容易偏离行驶轨迹,甚至发生翻车的危险,为提高行驶平顺性,国内外研究主要集中在通过调节阻尼大小从而减小车辆振动的主动悬架系统和半主动悬架系统[1-5]。在参考文献[6]中Zhang等总结了道路车辆横风稳定性风险分析的方法,提出并详细分析了作用在运行车辆上的风力和力矩的非平稳模型;参考文献[7]中王德军等针对侧风干扰情况下的车辆稳定性和通讯问题,建立了V2X模型,根据反步控制的思想提出了车辆稳定性控制策略。目前尚未见强横风对半主动悬架车辆安全性的影响等相关方面的研究。本文基于Carsim软件建立整车动力学和A级路面立体模型,在Simulink 中建立基于横风作用的半主动悬架模糊PID 控制系统,设计并研制阻尼连续可调的减振器及其控制系统,通过Carsim 和Simulink 联合仿真和实车道路试验,验证模型的正确性和控制系统的有效性。
1 模型建立
1.1 整车动力学模型
CarSim 是专门针对车辆动力学的仿真软件,本文利用Carsim 软件建立整车动力学模型,车辆外形选取Carsim 软件系统中的D 级四门轿车,发动机最大功率150 kW,6挡变速器,四轮均选用独立悬架系统。
1.2 路面模型
路面模型采用滤波白噪声的随机路面输入时域模型。

式中:x0(t)为路面位移;f0为下截止频率,取0.01;
G0为路面不平度系数,取16×10-6,ω(t)为均值为0、强度为1的均匀分布白噪声。将该路面模型转换成3D路面,加载到Carsim系统中。
2 半主动悬架模糊PID控制系统
传统的半主动悬架控制系统是通过车辆垂直振动加速度决定半主动悬架的阻尼系数大小,并没有考虑横风对悬架控制系统的影响。本文提出一种阻尼系数修正控制方法,在传统控制器的输出端叠加一个阻尼系数修正量,即可以使横风对车辆运行姿态的影响很好地反映在阻尼系数上,阻尼系数修正量的大小由模糊控制器输出。建立的基于横风的半主动悬架模糊PID(Proportional Integral Derivative)控制系统原理如图1所示。
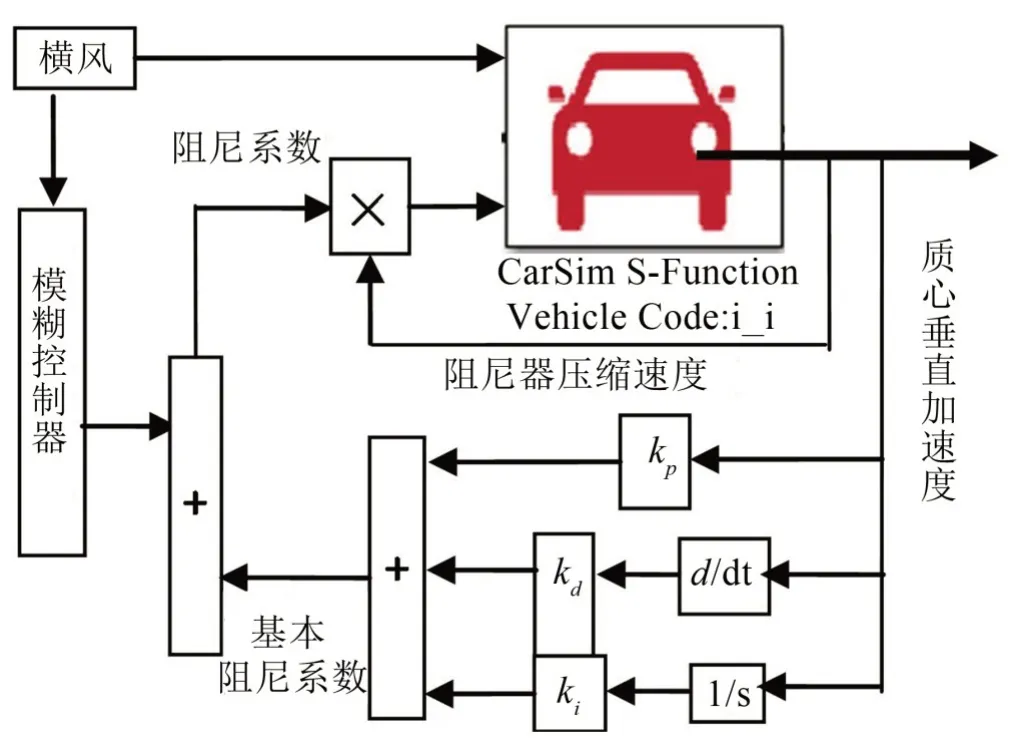
图1 半主动悬架模糊PID控制系统
从图1可以看出,PID控制器根据车辆质心垂直加速度输出各轮半主动悬架基本阻尼系数,模糊控制器根据横风强度和方向对各轮半主动悬架的阻尼系数进行修正,从而确定出此时各轮半主动悬架系统最终需提供的阻尼系数大小,将阻尼系数与各轮半主动悬架阻尼器的压缩速度相乘即可得到阻尼力,并与强横风共同加载到Carsim 整车动力学模型中。
阻尼系数修正原则:在横风强度比较大的时候主要考虑车辆安全性,横风强度越大,就减小靠近横风一侧半主动悬架的阻尼系数,或增大另一侧悬架的阻尼系数,从而使车身迎着横风有更大的倾斜量,这样有利于提高车辆的横向稳定性。汽车有四个独立的悬架系统,所以模糊控制器为两输入四输出控制系统,输入参数分别为横风强度和横风袭来方向,输出参数分别为左前轮、右前轮、左后轮和右后轮半主动悬架阻尼系数修正量,横风强度的论域划为6个模糊子集{ZE(零),S(小),MS(中小),M(中),MB(中大),B(大)};横风从车辆右侧袭来为正,从车辆左侧袭来为负,以正向横风为例,将横风方向的论域划为6 个模糊子集{ZE(零),S(小),MS(中小),M(中),MB(中大),B(大)};阻尼系数修正量论域划为6个模糊子集{NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中),PB(正大)};各语言变量的隶属度函数选用三角形,模糊控制规则选用Mamdani型,以横风从车辆右侧来袭为例,各轮模糊控制器的具体模糊控制规则如表1至表4所示。

表2 右前轮模糊控制规则

表3 左后轮模糊控制规则

表4 右后轮模糊控制规则
3 PID控制器参数粒子群优化
PID控制器性能的优劣很大程度上取决于参数Kp、Ki、Kd的选取[8-10],通过人工试凑很难找到最优的参数,所以有必要采用智能优化算法找到理想的控制器参数。粒子群算法具有对整个参数空间进行高效并行搜索的特点,所以本文利用粒子群算法对PID控制器的参数Kp、Ki、Kd进行整定。
本文选取质心垂直加速度和车身侧倾角速度作为半主动悬架的性能指标,由于质心垂直加速度和车身侧倾角速度的单位以及数量级均不一致,因此将其除以各自相应的被动悬架性能指标值表示粒子群算法的适应度函数。该优化问题表述如下:

其中:BA、BRR分别代表车身垂直加速度和车身侧倾角速度的均方根值;BApas、BRRpas代表被动悬架的相应性能;优化变量X为PID 控制器的参数Kp、Ki、Kd。基于粒子群算法的半主动悬架PID控制器参数优化过程示意图如图2所示。
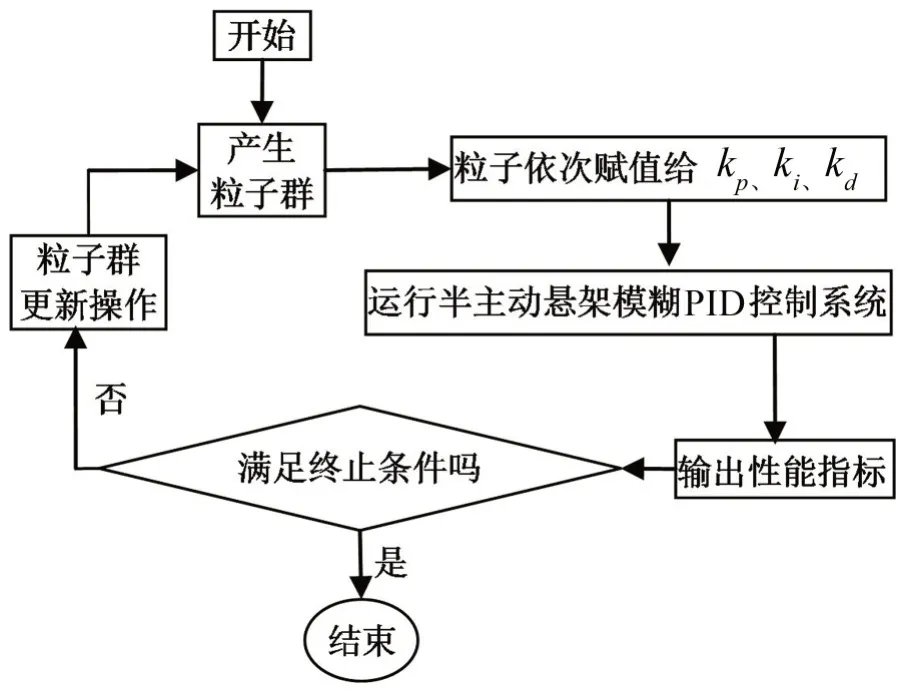
图2 粒子群算法优化半主动悬架PID控制器参数
运用粒子群算法优化半主动悬架PID 控制器参数Kp、Ki、Kd时,设置粒子群优化的参数为:粒子群规模为100,惯性因子为0.6,加速常数为2,维数为3,速度范围为[-1,1],最大迭代次数为100。
4 仿真结果分析
为验证控制系统的有效性,在MATLAB R2016和Carsim2016 环境下建立整车动力学模型及其模糊自调整控制系统,进行仿真计算及分析。仿真计算时,横风速度设定为60 km/h,横风从车辆正右侧向车辆袭来,车辆行驶速度设定为100 km/h,路面等级选取为A级路面,路面附着系数设定为0.85,结果联合仿真,结果如图3和表5所示。

表5 仿真的结果比较
从图3、表5中可以看出,与被动悬架系统相比,经过半主动悬架模糊PID 控制后,车辆的质心垂直加速度峰值和标准差均下降了30%以上,车身侧倾角速度的标准差下降了50.7%。
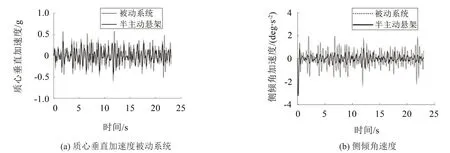
图3 仿真结果
5 实车道路试验
为考察半主动悬架模糊PID控制策略的有效性和可靠性,设计了一种阻尼连续可调的减振器,并通过减振器台架试验,利用4 阶拟合得到可调式减振器阻尼力与步进电机转角之间的关系曲线。其函数关系式为:

其中:θ为步进电机的转角,范围为[0°,30°],c为可调减振器的平均阻尼力,范围为[0.54 kN,1.15 kN]。图4为加装步进电机的可调阻尼减振器实物图。

图4 可调阻尼减振器
将陀螺仪、转向盘转角传感器、可调阻尼减振器和控制系统硬件等装车进行了道路试验,进行了车速60 km/h、6级横风约40 km/h速度从右侧袭来的实车道路试验,路面为平直的水泥路面。现场仪器安装如图5所示。分别进行了被动系统和半主动悬架模糊PID控制的试验,结果如图6所示。

图5 仪器安装现场
从图6中可以看出,与被动悬架系统相比,经过半主动悬架模糊PID 控制后,车辆质心垂直加速度峰值下降了32.2%,标准差下降了30.4%,车身侧倾角速度峰值下降了20%,标准差下降了25.7%,改善平顺性的同时提高了车辆安全性。
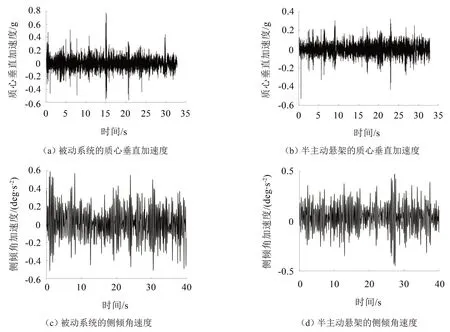
图6 试验结果
6 结语
(1)设计了一种基于横风的半主动悬架模糊PID控制系统,利用粒子群算法全域寻优PID控制器参数,PID 控制器根据车辆质心垂直加速度确定半主动悬架的基本阻尼系数,模糊控制器依据横风强度和袭来方向对各轮阻尼系数进行修正,与基本阻尼系统叠加后即可确定出当前行驶工况下半主动悬架的阻尼系数。
(2)设计并研制了一种阻尼系数连续可调减振器,通过台架实验获得阻尼力与步进电机转角的关系曲线。MATLAB 和Carsim 联合仿真和实车道路试验结果表明,在强横风作用下,与被动悬架系统相比,经过半主动悬架系统控制后的车辆具有更好的行驶平顺性和安全性。
猜你喜欢
军民两用技术与产品(2021年6期)2021-10-14
军民两用技术与产品(2021年1期)2021-07-28
防爆电机(2021年3期)2021-07-21
广西科技大学学报(2021年1期)2021-03-15
铁道通信信号(2020年6期)2020-09-21
南京大学学报(数学半年刊)(2020年1期)2020-03-19
北方工业大学学报(2019年5期)2019-03-30
科学与财富(2017年12期)2017-05-16
汽车技术(2017年4期)2017-04-26
汽车工程学报(2015年6期)2016-03-23