
基于船用异步轴带电机的锂电池充电技术研究
2022-07-04 11:53张鹏
船电技术 2022年6期
张 鹏
基于船用异步轴带电机的锂电池充电技术研究
张 鹏
(武汉船用电力推进装置研究所,武汉 430064)
为降低船舶污染物排放量,实现“绿色船舶”,使用动力电池和推进电机为船舶提供动力。本文分析了船用异步轴带电机的使用原理,研究了使用轴带电机给锂电池充电的控制技术。提出了一种分段式锂电池稳定充电策略。最后使用仿真和试验的手段,从多个角度验证了该充电技术的有效性和稳定性。
轴带电机 锂电池 充电策略 绿色船舶
0 引言
为实现“碳达峰碳中和”的发展目标,交通运输部颁布了“船舶大气污染物排放控制区实施方案”,对船舶的绿色化提出了更高的要求[1]。
以机械推进为动力方式的传统船舶,采用燃气轮机或柴油机为推进主机,污染物排放量高,且推进效率较低,显然不符合“绿色船舶”的发展需求。以电力推进为动力方式的新型船舶,使用动力电池和推进电机为船舶提供动力[2],灵活性好,控制简便,能有效提高运行效率和能源利用率,更能实现航段内的“0排放”。
但由于动力电源的容量限制,纯电池动力船的航程较短,使用“柴-电”混合动力的方式,既能保证船舶较长的运行航程,又能满足降低排放量的要求。轴带电机能很好的将柴油动力和电池动力相结合[3],在使用柴油机提供全船动力时,利用预留的富裕功率,为动力电池充电。
本文分析了船用异步轴带电机在发电工况下为锂电池充电的控制技术,提出一种使用稳定且容易工程实现的锂电池充电策略。仿真和试验从不同转速、动态调速等多种工况验证了该策略的稳定性。
1 船用轴带电机
使用轴带电机连接的“柴-电”混合船舶动力系统如图1所示,其中包括柴油机、轴带异步电机、动力锂电池、齿轮箱、螺旋桨、变流器、直流母线、逆变电源等。
混合动力系统中的螺旋桨、柴油机和轴带异步电机通过齿轮箱连接。当航速较低时,柴油机的运行效率低,还会排放大量氮氧化合物,因此切换至纯电力推进模式,动力锂电池通过直流母线和变流器向轴带异步电机供电,轴带异步电机电动运行,为螺旋桨提供动力。全速运行时,使用柴油机直接为螺旋桨提供充足强劲的动力,同时控制轴带异步电机运行于发电工况,利用柴油机的富裕功率给动力锂电池充电。
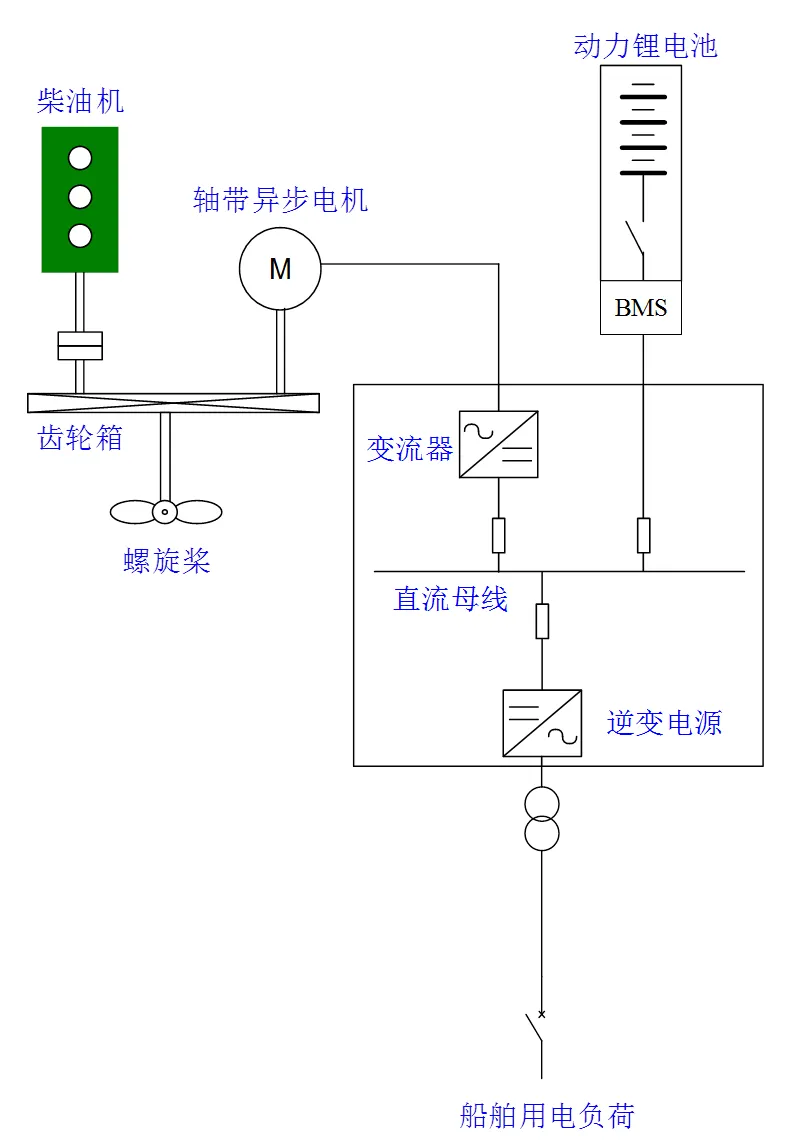
图1 “柴-电”混合船舶动力系统
此外,由于直流母线还需要通过逆变电源给船舶用电负荷供电,轴带异步电机在为电池充电的同时,还需要维持直流母线电压稳定。
这种交替混合的动力系统,让柴油动力和电池动力相互协调匹配,实现能量优化,有效提升船舶的经济效益与环保效益。
2 锂电池充电策略
锂电池动力系统在计算电池电量时,常用电流积分法。电流积分法[4]又称安时计量法,是一种通过计算充放电量来估算电池电量的方法。该方法简单可靠,且能对电池电量进行动态观测。工程应用时,电流传感器测量快速变化的电流时,会产生较大误差。时变的充电电流经过积分,误差也会因为积分而快速增大,这会导致电池电量计算不准。电池电量在锂电池动力控制与能量管理系统中是关键特征量,电池电量的误差过大可能会导致能量管理策略失效,甚至会导致电池过充而产生电池极化、内部结构损坏等危害。同样的,电流的纹波过大也会导致电池电量计算误差增大,从而导致系统安全性降低。为了保证船舶动力推进系统的安全性与稳定性,充电电流不宜经常变换,应尽量保持恒定,且保持较小的纹波。
然而锂电池的抗过充能力差[5,6],电池电压不能超过设计电压峰值的1%。因此在电池电量快要充满时,应降低充电电流,减缓充电速度。在电池充满后,切换至浮充状态,在维持电量的同时,保证电池组的健康状态,延长电池的使用寿命。轴带电机给锂电池充电的流程图如图2所示。
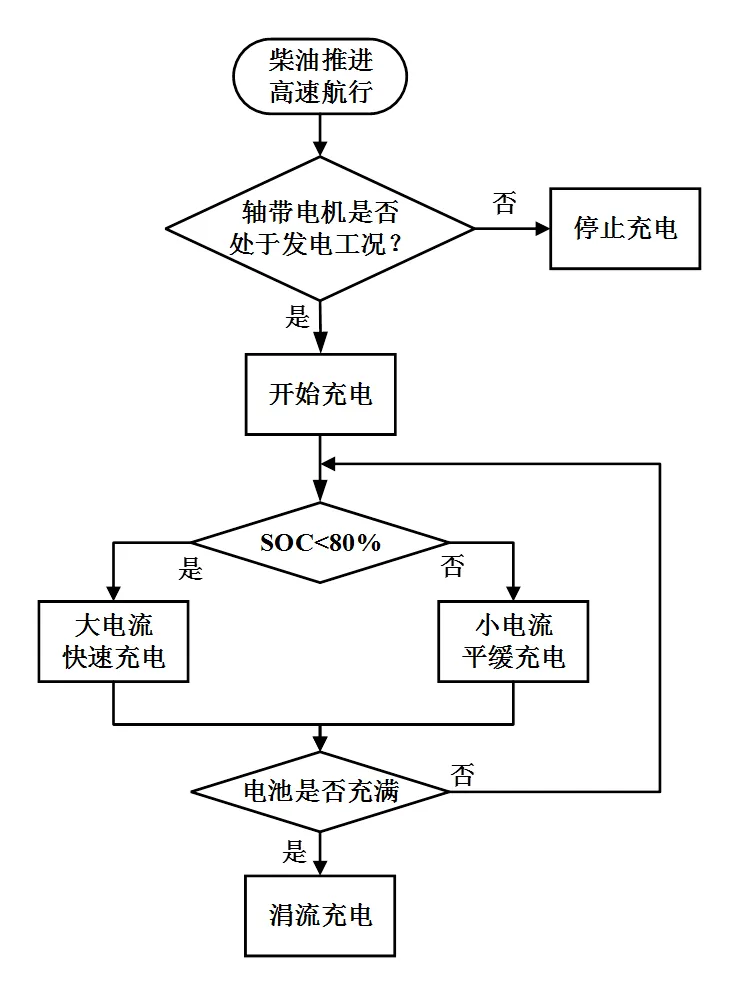
图2 轴带电机给锂电池充电流程图
在使用柴油动力航行时,首先判断轴带电机是否运行于发电工况。当柴油机的转速足够大时,轴带电机才开始发电,也才具备给电池充电的条件。当电池电量较低时,采用大电流恒流充电方式,快速给电池充电。当电量大于80%时,采用小电流恒流充电方式,减缓充电速度,防止快速过充。当电池充满后,采用恒压涓流充电,维持电池满电状态。三种充电方式可以在同一套控制系统中实现,不用切换控制方式,实现简单,具体流程图如图3所示。
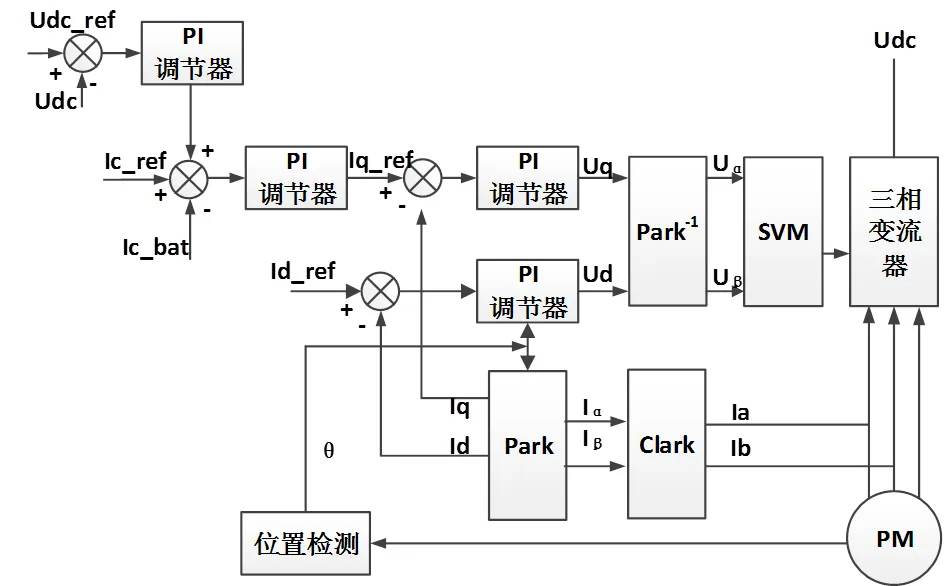
图3 锂电池充电控制图
图3中PM表示轴带电机,轴带电机发电经三相变流器将交流电变换成直流电后给电池充电;Udc为变流器输出母线电压,即为电池充电电压;Ic为电池充电电流,Udc_ref表示电池充电电压指令值;Ic_ref表示电池充电电流指令值。
基于轴带电机的锂电池充电策略采用电压外环,电流内环的双环控制。当电池还未充满时,电流内环起主要作用,根据图2所示的充电策略给定不同的电流Ic_ref即可实现两种恒流充电模式。当电池充满后,电压环起主要作用,实现恒压涓流充电模式。
3 仿真与试验验证
为了验证上述推导和结论的正确性,本文建立了基于船用轴带电机的锂电池充电系统仿真模型。模型忽略柴油机部分模型,认为柴油机给轴带电机的转速是稳定的理想转速。
设锂电池额定电压为650 V,剩余电量70%。图4是柴油机传给轴带电机转速为1500 r/min时的锂电池充电仿真波形。
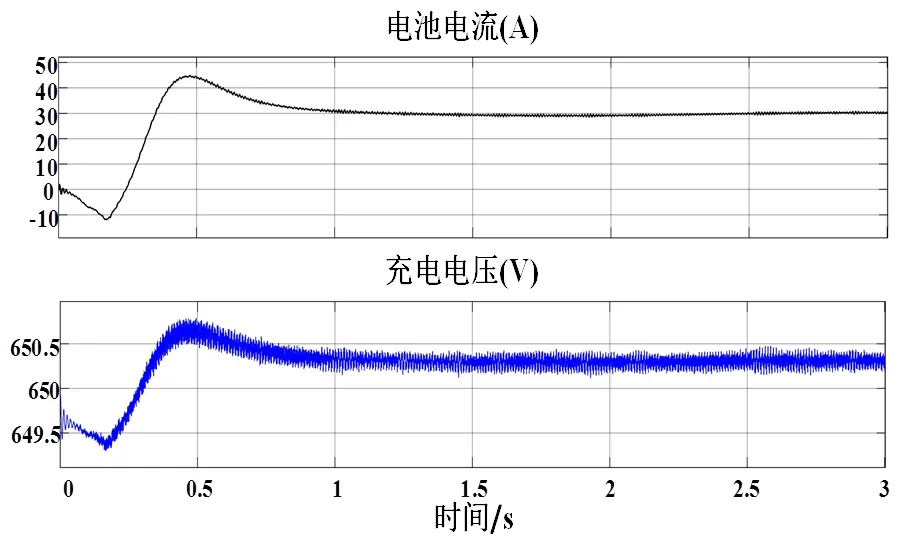
图4 1500 r/min时锂电池充电仿真波形
充电电流迅速稳定于快速充电电流30 A,直流母线电压也稳定于670 V。
图5是柴油机传给轴带电机转速从1500 r/min调速至1800 r/min时的锂电池充电仿真波形。
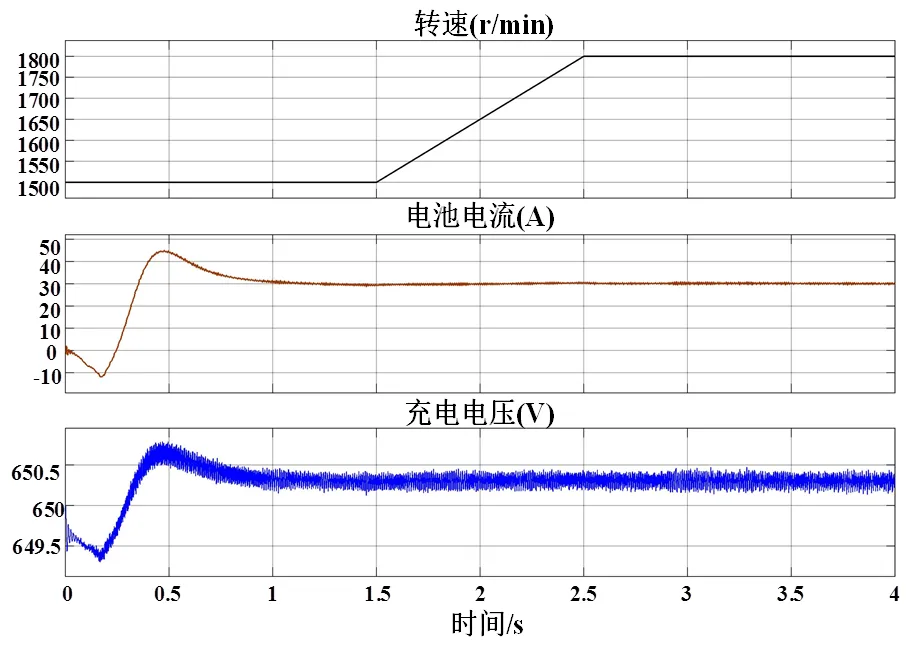
图5 转速变化时锂电池充电仿真波形
可见转速上升的过程中,充电电流一直维持在30A,直流母线电压也没有发生明显变化,充电过程稳定。轴带电机转速的变化不影响锂电池充电稳定性。
图6是电池电量充到80%,转换使用平缓充电模式时的锂电池充电仿真波形。
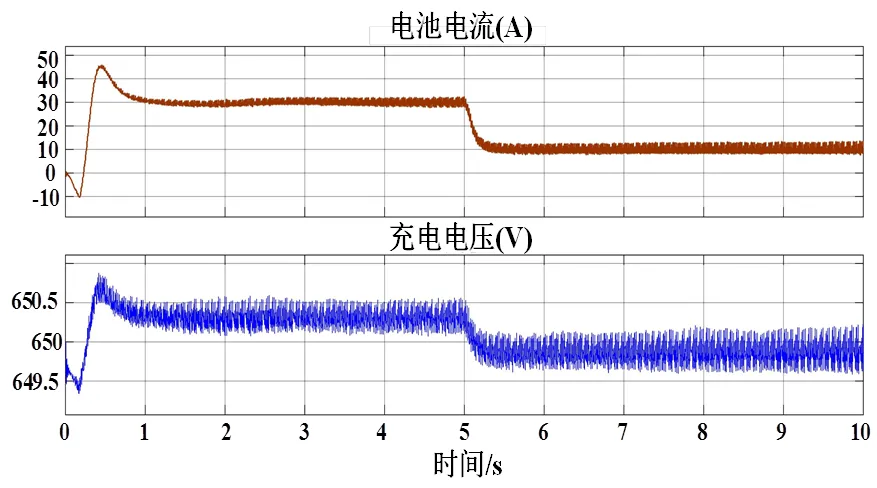
图6 切换充电模式时锂电池充电仿真波形
从图6可以看出,切换充电模式后,电流下降至10 A平缓充电电流,且一直保持稳定。直流母线电压下降,但只下降了0.5 V,对系统的影响可以忽略不计。
本文搭建了基于船用轴带电机的锂电池充电系统模型,用于验证第2节所述充电策略的正确性与稳定性。除轴带电机外,还使用了一台异步电机,用于模拟柴油机拖带轴带电机发电。选用的锂电池额定电压为685 V。
图7所示是电机转速为1500 r/min时,快速充电的试验波形。其中1通道表示的是轴带电机输出电压,3通道表示的是电池充电电压,4通道表示的是电池充电电流。充电电流波形平稳,电流平均值为29.94 A,充电电压稳定于689.5 V。
图8所示是电机转速从1500 r/min升速过程中的试验波形。升速后,轴带电机输出电压幅值平缓下降,但充电电流维持在29.81 A,波动很小,充电过程稳定。轴带电机调速对锂电池充电影响小。
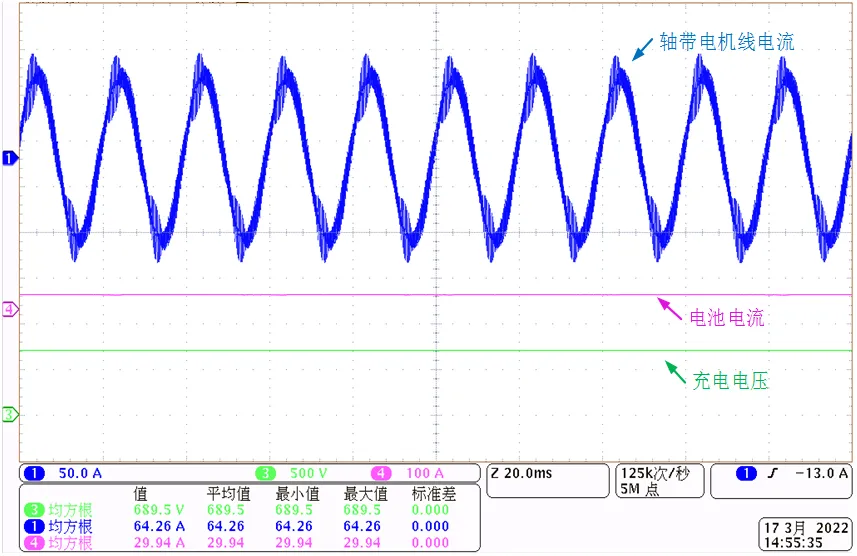
图7 1500 r/min时锂电池充电试验波形
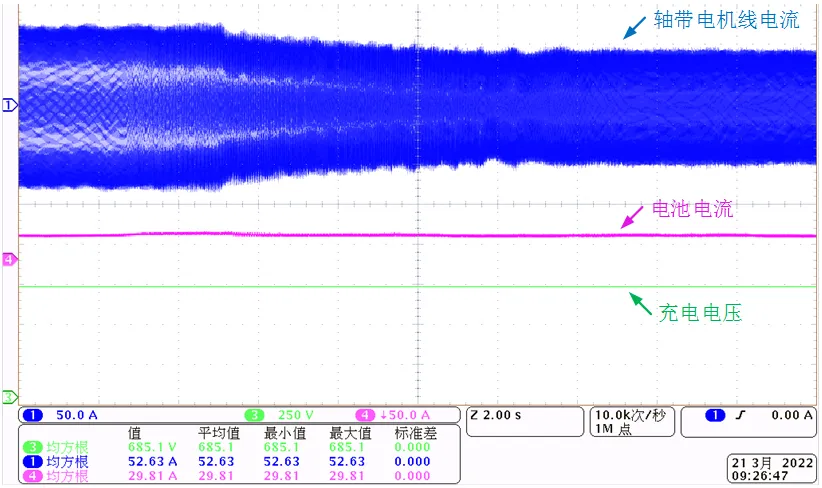
图8 调速时锂电池充电试验波形
图9所示是从快速充电模式切换至平缓充电模式时的波形图,图中标示的数值均为所测对象有效值。充电电流下降至10 后,一直稳定于10 A,整个切换过程快速、稳定。
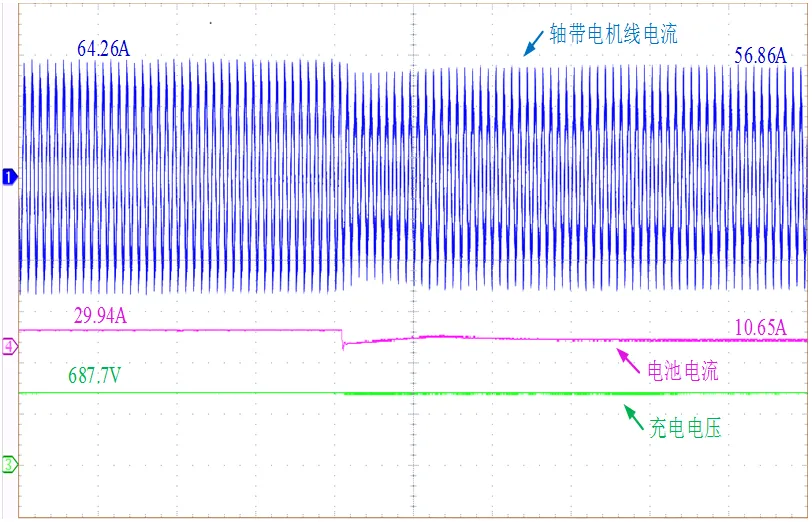
图9 切换充电模式时锂电池充电试验波形
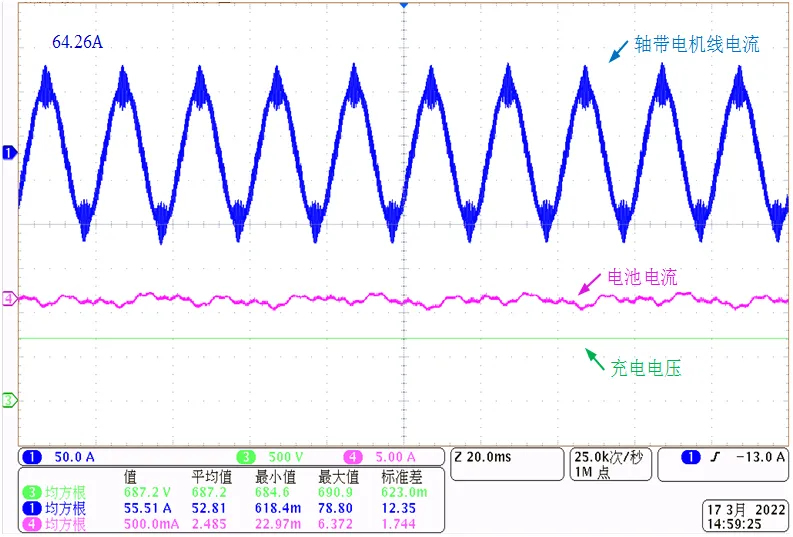
图10 涓流模式时锂电池充电试验波形
图10时电池充满后,涓流充电的试验波形图。充电电流在0 A附近小范围波动,充电电压维持在687.2 V。实现锂电池涓流充电。
仿真和试验结果均表明了第2节阐述的船用异步轴带电机给锂电池充电策略稳定有效。
4 结论
本文介绍了“柴-电”混合船舶动力系统中轴带异步电机的使用原理。并根据锂电池安全充电特性,提出了一种基于船用轴带电机的分段式双环控制锂电池充电策略。仿真和试验结果均证明该充电策略稳定有效。
[1] 郑洁, 柳存根, 林忠钦. 绿色船舶低碳发展趋势与应对策略[J]. 中国工程科学, 2020, 22(06): 94-102.
[2] 张丙楠, 杜博超, 赵天旭, 肖阳, 崔淑梅. 舰船电力推进电机研究现状与发展综述[J/OL]. 中国电机工程学报: 1-17.
[3] 秦秀敬. 基于模型预测的船舶轴带电机控制系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
[4] 姚芳, 田家益, 黄凯. 锂电池组健康状态计算方法综述[J]. 电源技术, 2018, 42(01): 135-138.
[5] 周鹏. 动力锂电池的充电及保护应用[J]. 电源技术, 2012, 36(05): 648-649+708.
[6] 张东羽. 基于结构与性能的动力电池过充/过放检测[D]. 广州: 华南理工大学, 2018.
Research on lithium battery charging technology based on marine asynchronous shaft motor
Zhang Peng
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM912
A
1003-4862(2022)06-0013-04
2022-03-24
张鹏,男,高级工程师。研究方向:电力电子与电力传动。E-mail: cpy1207@163.com
猜你喜欢
汽车零部件(2022年7期)2022-08-03
电子技术与软件工程(2022年6期)2022-07-07
汽车与驾驶维修(维修版)(2020年2期)2020-01-07
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
科技知识动漫(2017年4期)2017-04-15
中国水运(2015年11期)2015-12-08
农机使用与维修(2014年6期)2014-09-23
中国水运(2014年7期)2014-08-11
现代电子技术(2009年8期)2009-06-25
