
类X-43A飞行器高超声速分离仿真
2022-07-04 02:25赵飞刘丽玲石泳左光万千张宇佳
航空学报 2022年5期
赵飞,刘丽玲,石泳,左光,万千,张宇佳
1.中国空间技术研究院 钱学森空间技术实验室,北京 100094
2.中国矿业大学(北京) 机电与信息工程学院,北京 100083
高超声速飞行器具备高速巡航、快速突防、灵活机动的优势,在军事和航空航天领域广泛应用。但高超飞行器在执行任务过程中,有时会存在多体分离或载荷释放的过程,如助推器与巡航飞行器分离、火箭助推级与芯级分离、弹箭分离等,由于其外形日趋复杂,在高超声速分离过程中,级间的流动干扰变得尤为突出,从而严重影响各级飞行器气动力/力矩特性,进而对分离过程中飞行器姿态产生影响,甚至危及飞行安全。因此,亟需对高超声速飞行器多体分离过程开展试验和仿真研究。
在高超声速多体分离试验方面,国内外主要的空气动力研究机构研制了大量多体分离试验装置,并进行了较成熟的多体分离试验。例如,美国的AEDC风洞早在20世纪70年代便配备了六自由度捕获轨迹系统(CTS),具备多种飞行器串/并联级间分离等试验能力;法国ONERA同样在20世纪70年代就具备了宽速域下的CTS试验能力,并进行了大量相关试验研究;中国的多体分离试验起步相对较晚,主要的研究机构有中国航天空气动力研究院和中国空气动力研究与发展中心,进行了网格测力和CTS级间分离气动干扰特性风洞试验,取得了不少成果。
针对多体分离数值仿真,国内外开展了一些工作,但重点多集中于空中投放、火箭端面串联方式的级间分离等方面,在这些研究中两级通常为简单的钝头旋成体结构,级间分离气动干扰较小,目前先进的高超声速飞行器为了减小气动阻力,一般采用面对称、细扁薄的外形,且巡航级和助推级采用尾端面和底面共同连接的形式,使级间分离干扰更加复杂,而针对此类高超飞行器的分离特性研究较少。美国X-43A飞行器为典型的扁平构型,端面和底面与助推火箭通过适配器连接,本文以类X-43A飞行器为研究对象,采用网格变形/局部网格重构的方法对其高超分离过程进行仿真模拟,重点关注连接处的分离干扰,并分析初始分离攻角、弹射力对分离过程的影响。
1 数值模拟方法
1.1 数值算法
采用三维雷诺平均Navier-Stokes方程作为控制方程,其表达式为

(1)
式中:为守恒变量;、、表示无黏对流通量;、、为黏性通量。
湍流模型采用-SST两方程模型,其湍动能输运方程和湍流比耗散率方程为

-
(2)

-+2(1-)
(3)
式中:和分别为方程和方程的系数;和为湍流模型系数;为湍流模型系数的合成函数。控制方程的空间离散方法采用具有较高黏性分辨率且收敛性较好的Roe-FDS格式。
1.2 飞行力学模型
本文所用飞行力学模型基于刚体的六自由度运动,具体模型方程为

(4)
(5)
′=′′+′×(′′)
(6)
′=′
(7)

1.3 网格变形/局部重构算法
针对类X-43A分离仿真,采用网格变形与局部重构相结合的方法,在单时间步位移较小的情况下采用Laplace算法进行网格变形,使式(8)所示的二次方程最小化:
(8)

1.4 仿真模型和边界条件
采用的分离仿真模型由类X-43A飞行器与助推火箭两级构成,总长15 m,飞行器长3.63 m,助推器长12.55 m。类X-43A飞行器采用乘波体构型,机身下表面压缩面作为乘波前体,该构型一方面产生高升力,同时为吸气超燃冲压发动机提供高品质来流。助推器采用大三角翼面,并包含三片梯形尾翼。飞行器下部和尾部端面通过适配器与助推器连接,如图1所示。图2展示了飞行器和级间连接处附近的网格,由于在利用网格变形/局部重构算法对分离问题进行仿真时需要各分离体之间存在明确的边界,且边界之间存在网格,为了使仿真能够有效进行,初始状态二者之间预留1 mm的间距。
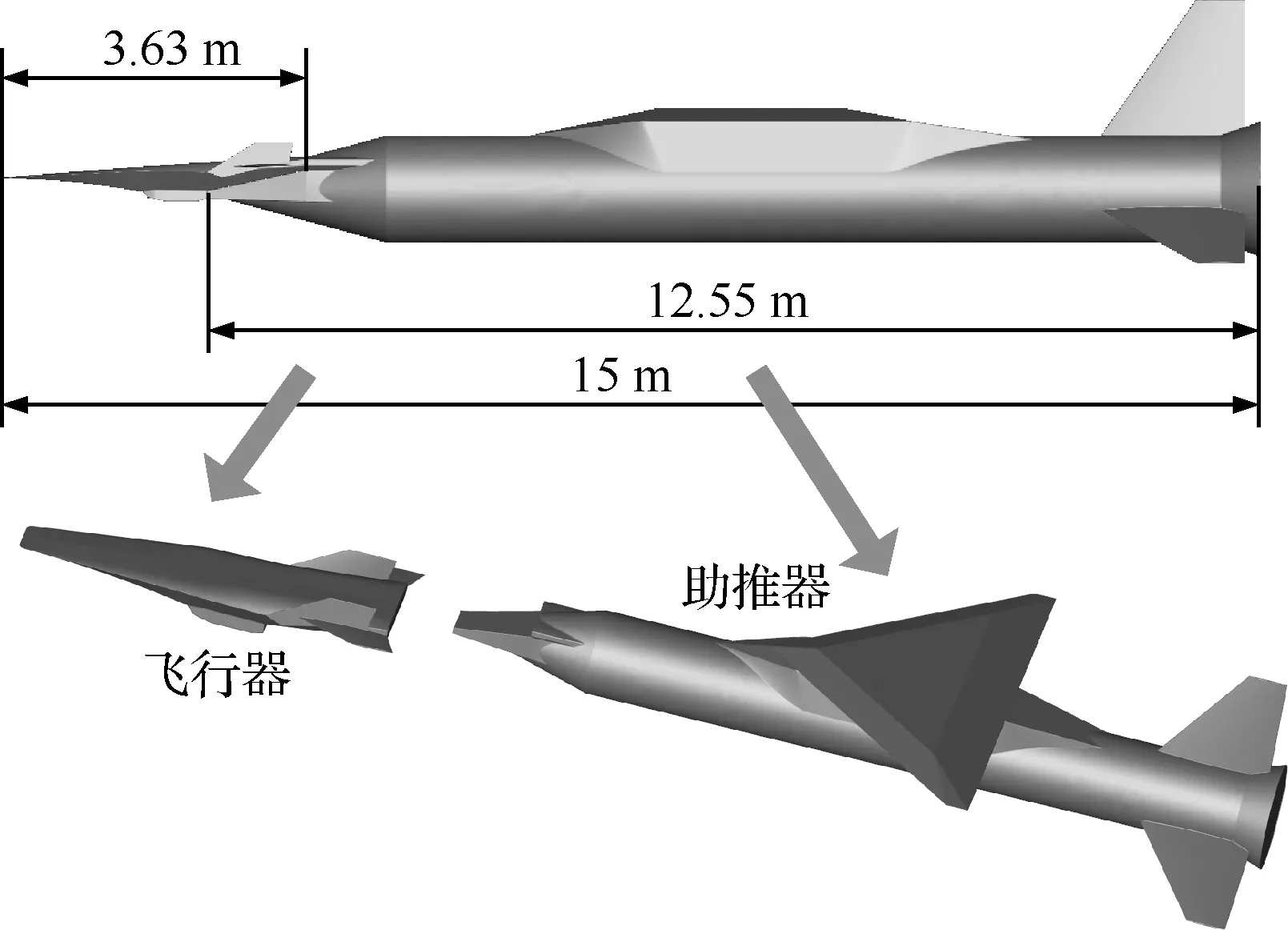
图1 类X-43A飞行器实体模型Fig.1 Entity model of aerocraft similar to X-43A
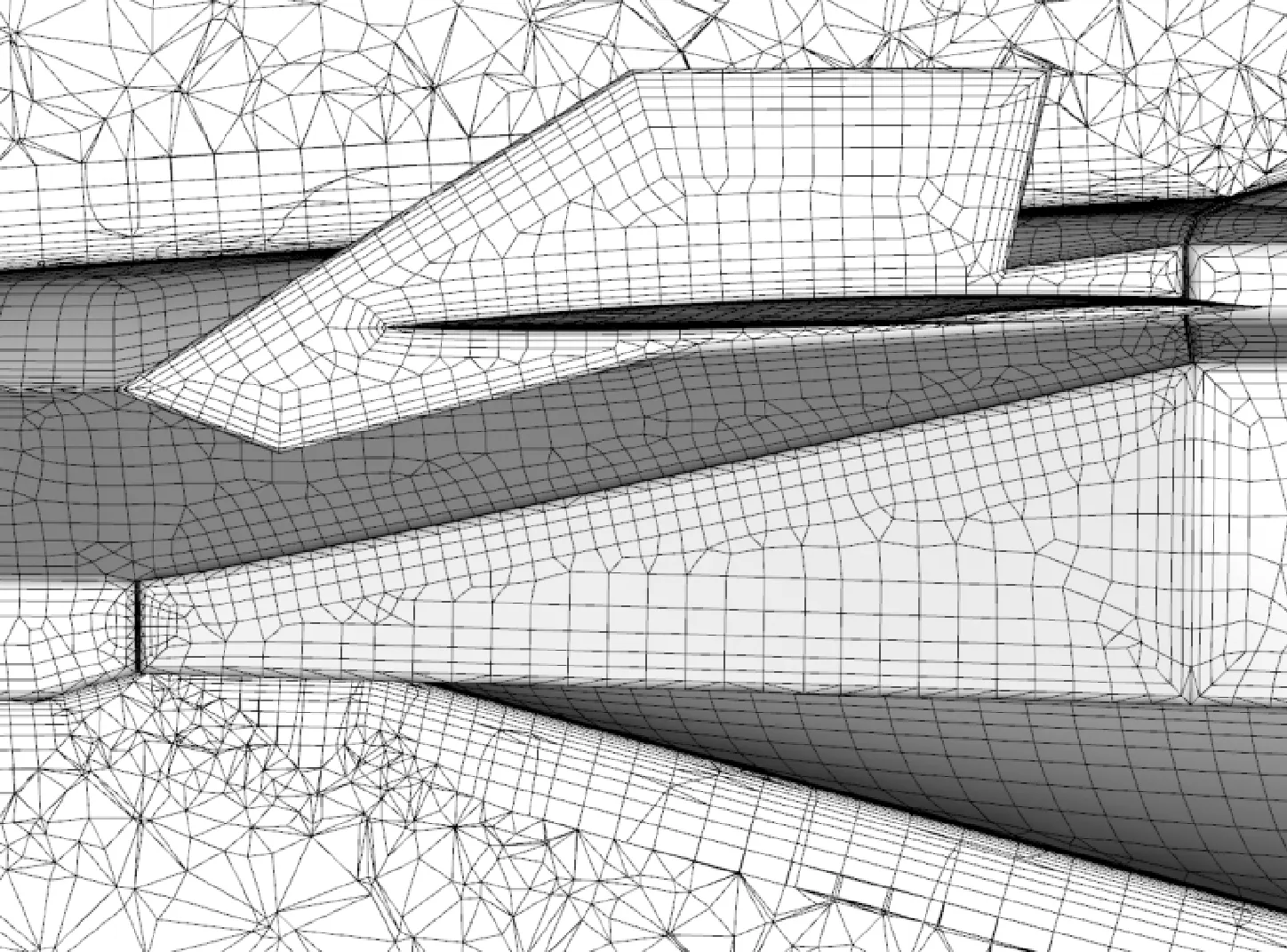
图2 类X-43A飞行器局部网格Fig.2 Local mesh of aerocraft similar to X-43A
图3展示了类X-43A飞行器分离仿真计算域及边界条件。其中,飞行器和助推器壁面采用无滑移绝热壁,计算域入口边界采用压力远场,来流均为超声速流动,输入参数包含马赫数、静压、静温等,出口边界设置为超声速出口。
图3 计算域和边界条件Fig.3 Computational domains and boundary conditions
2 仿真验证
选取美国空间实验室进行的机翼/挂架模型WPFS分离投放作为仿真算例来验证仿真方法的正确性。图4为该模型示意图,机翼为45°后掠的三角翼,采用NACA64A010翼型,半展长为6.6 m。机翼挂架位于机翼的中部,总长为2.3 m,宽0.15 m。弹身直径为0.508 m,轴向长度为0.85 m,中间圆柱段长1.69 m,导弹尾部布置4片X形分布的尾翼。
图4 机翼挂载模型示意图Fig.4 Schematic diagram of wing mounting model
为了使弹体与挂架迅速分离,在挂载弹两端施加大小分别为10 675.7 N和427 02.9 N的弹射力,挂载弹在弹射力、重力和气动力的作用下运动,挂载弹的特性参数和仿真工况如表1所示。
表1 挂载弹质量特性参数及仿真工况Table 1 Mass characteristic parameters and simulation conditions of mounted projectiles
利用以上仿真工况,开展机翼/挂载分离仿真,首先计算该工况下的定常流场,将其作为分离时刻的初场,时间步长取0.5 ms。图5展示了不同分离时刻质心在、、3个方向的位移,其中线为仿真结果,点为试验结果,可以看出二者吻合较好,验证了仿真方法能够对分离问题进行有效模拟。
图5 质心位移随分离时刻变化Fig.5 Variation of centroid with separation time
另外,为了评估分离间隙对仿真结果的影响,分别对0.5 mm和1.0 mm分离间隙条件下的分离工况进行了分析,重点对比其对轴向、法向分离距离的影响,结果如图6所示。可以看出,分离间隙分别为0.5 mm、1.0 mm情况下的轴向和法向相对距离吻合较好,分离间隙对于分离仿真结果基本无影响。
图6 分离间隙分别为0.5 mm, 1.0 mm情况下相对距离随分离时刻的变化Fig.6 Relative distances between aerocraft and assistor with separation gap of 0.5 mm and 1.0 mm
3 结果分析
X-43A的分离是在级间连接爆炸螺栓解锁后,首先在液压杆的弹射力作用下实施主动推离,弹射力随分离时间的变化如图7所示,在20 ms开始后弹射力迅速增大至约50 kN,随后弹射力逐渐降低,直至98 ms时降为0 N;随后飞行器和助推器在气动力、重力作用下实现分离。分离过程受很多参数影响,如分离速度、高度、姿态角等,下面首先对分离过程典型流场进行分析,之后重点讨论攻角、弹射力的影响。分离过程冲压发动机进气道处于封闭状态,分离初始状态参数设置如下:速度2 167 m/s,高度28.96 km,静压1 398.8 Pa,静温225.48,弹道倾角0°。
图7 弹射力随分离时刻的变化Fig.7 Variation of ejection force with separation time
3.1 典型流场
图8展示了0°攻角情况下,飞行器与助推器在200 ms 分离时间内典型的马赫数分布和流场情况。在分离初始时刻,冲压发动机前端在高超声速来流情况下形成较强的弓形激波,而助推器与飞行器底部和尾端面相接,其间基本没有流体流动,当分离时刻达到50 ms,二者连接面逐渐分开,此时流动由缝隙流逐渐变为小通道流;随着分离时刻达到100 ms,分离间隙进一步增加,级间连接处于飞行器的尾流区,分离间隙涡流强度逐渐增大,此时,飞行器和助推器之间的干扰主要来源于涡流。
图8 不同分离时刻类X-43A飞行器和级间连接处马赫数和流线分布Fig.8 Distribution of Mach number and streamlines between aerocraft and assistor at different separation time
当分离时刻达到150 ms时,级间连接前端逐渐脱离飞行器尾流区,并开始出现弓形脱体激波,分离间隙流场在尾流区和弓形激波的作用下呈现复杂的流场分布,最显著的流场结构在飞行器底部出现3个明显的涡流区;当分离时刻达到200 ms 时,级间连接前端基本脱离飞行器尾流区,并暴露在自由来流中,形成完整的弓形激波,从而限制了尾流涡系的发展,使飞行器底部的气流方向向机身下表面偏转,并在级间连接斜面处形成一个较大的涡流区,此时分离区的干扰来源于级间连接前缘诱导激波和涡流的共同作用。随着分离间距进一步增大,级间连接前缘的弓形激波进一步增强,而飞行器与助推器之间的干扰则会逐渐减弱。
3.2 攻角影响
图9展示了攻角对飞行器和助推器质心轴向和法向相对距离的影响。假设初始时刻二者的相对距离为0 m,由图可知,随着分离时刻的推进,轴向相对距离逐渐增大,但随攻角变化较小。图9(b) 展示了攻角对质心法向相对距离的影响,可以看到,随着初始分离攻角由2°减小到-2°,法向相对距离迅速增大。200 ms分离时刻,2°攻角情况下质心相对距离约0.08 m,-2°攻角情况下增大到0.34 m,对于类X-43A飞行器高超声速分离而言,需要飞行器和助推器的轴向和法向距离快速增大到安全距离,此时,采用小攻角或者负攻角更有利于安全分离。
图9 不同初始攻角情况下相对距离随分离时刻的变化Fig.9 Relative distances between aerocraft and assistor at different initial angles of attack
图10展示了150 ms分离时刻,初始分离攻角分别为-2°和2°情况下分离间隙及马赫数分布的对比情况。由图可知,2°攻角相较于-2°攻角情况下,飞行器和助推器均向+轴方向移动,但助推器移动距离更大,因此二者的法向间隙相对较小。对其进一步分析,比较了不同攻角下飞行器和助推器所受法向力,如图11所示,可以看到助推器法向力受攻角的影响更加显著,随着攻角的变化,助推器法向力变化率为飞行器的5倍以上,而助推器的质量仅约为飞行器的两倍,故正攻角下助推器沿+轴方向运动更加明显,这与助推器大三角升力面有关。
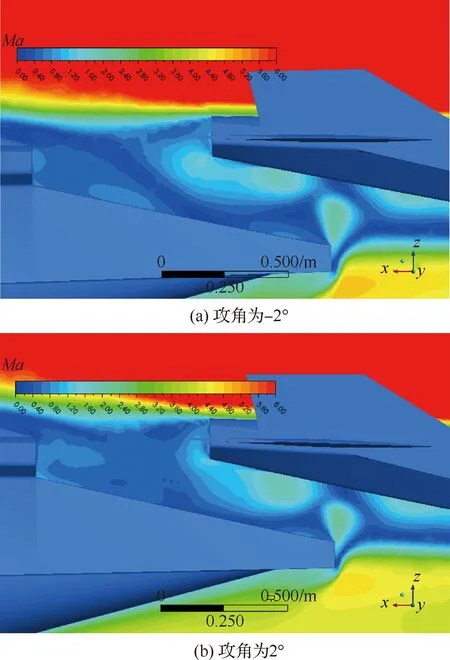
图10 150 ms分离时刻分离间隙及其马赫数分布Fig.10 Separation gap and Mach number distribution at 150 ms separation time
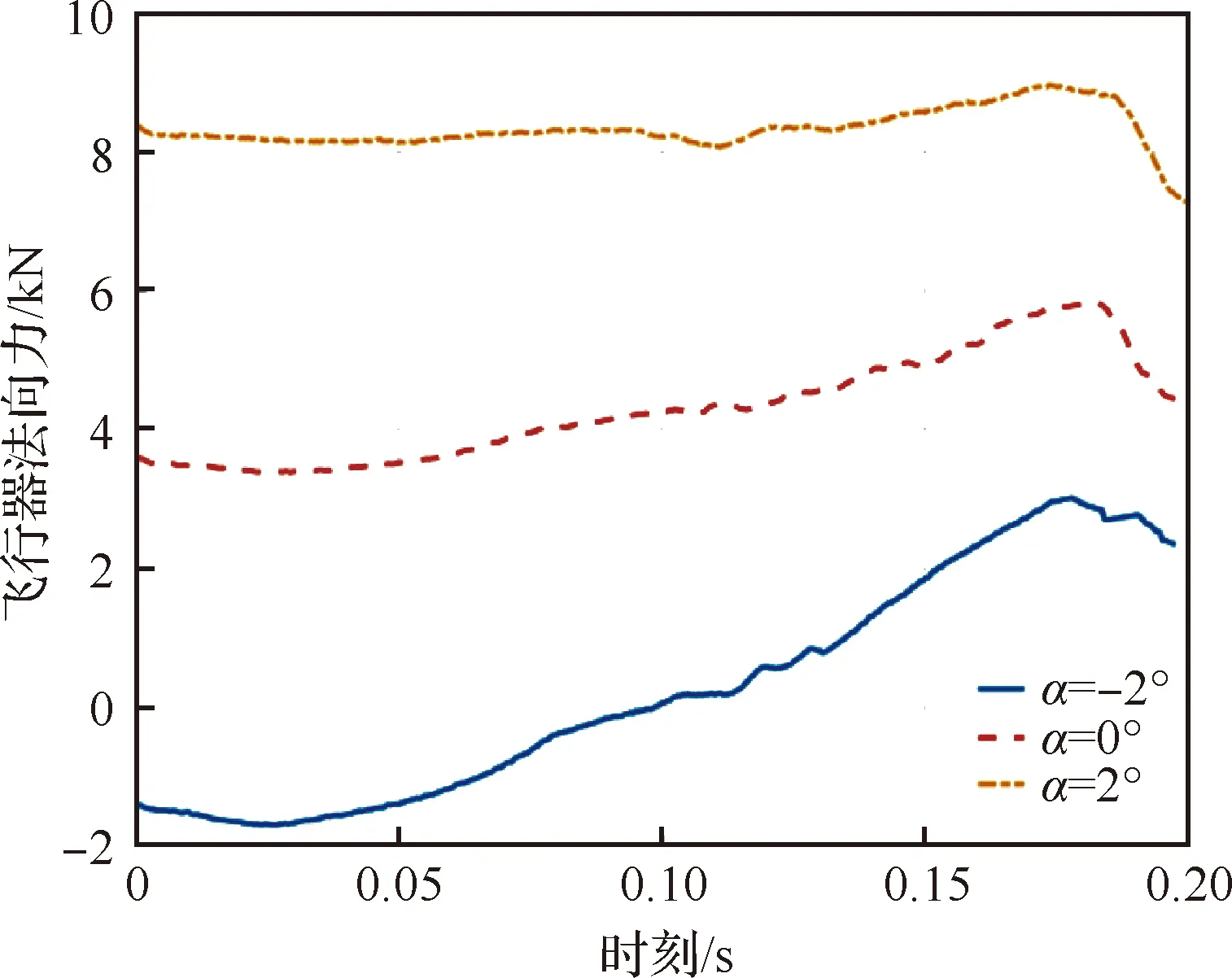
图11 不同分离攻角情况下飞行器和助推器所受法向力Fig.11 Normal force on aerocraft and assistor at different angles of attack
图12展示了飞行器攻角随初始分离攻角的变化情况,由图可知,随着分离时间的推进,3种不同初始攻角下类X-43A飞行器均呈现抬头趋势,且负攻角情况下飞行器抬头更加明显,这缘于-2°~2°攻角下飞行器处于静稳定状态,而此时飞行器的配平攻角大于2°,因此分离后飞行器攻角会向配平攻角运动,且距离配平攻角越远运动速度越大。
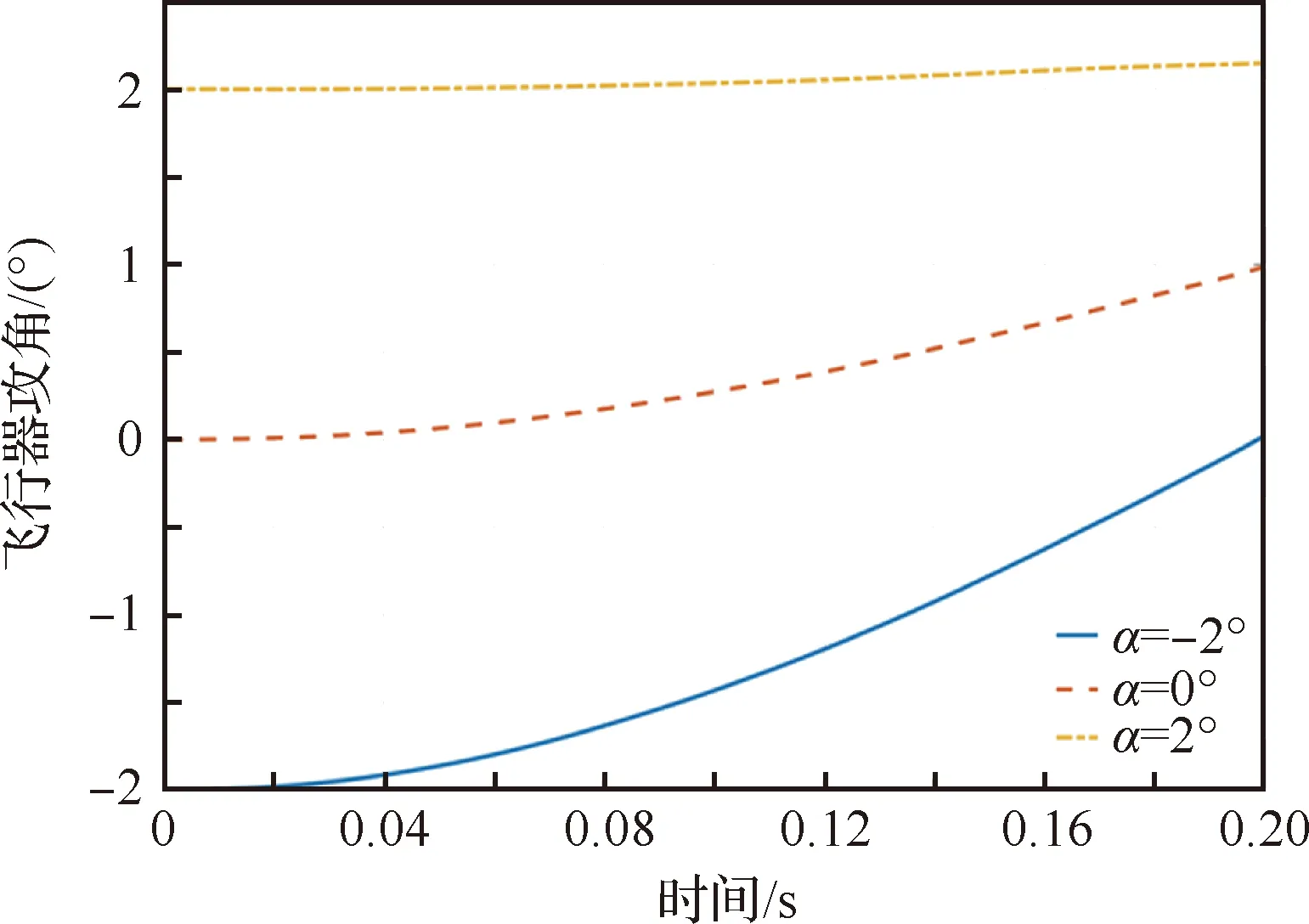
图12 飞行器攻角随初始攻角的变化情况Fig.12 Variation of aerocraft angle of attack with initial angle of attack
3.3 弹射力影响
为了研究弹射力对类X-43A飞行器和助推器的影响,对基准弹射力(图7)和两倍弹射力作用下的分离过程进行了仿真,并对比分析了其对轴向和法向相对距离的影响,如图13所示。由图可知,弹射力对于轴向相对距离影响较大,这主要是由于弹射力分别作用于飞行器和助推器,较大的弹射力使二者的相对分离速度快速增大,随着分离时间的推进轴向相对距离越来越大,0.2 s时相差约1 m,由此可知,较大弹射力更有助于飞行器轴向的分离,而图13(b)显示弹射力对法向相对距离基本无影响。
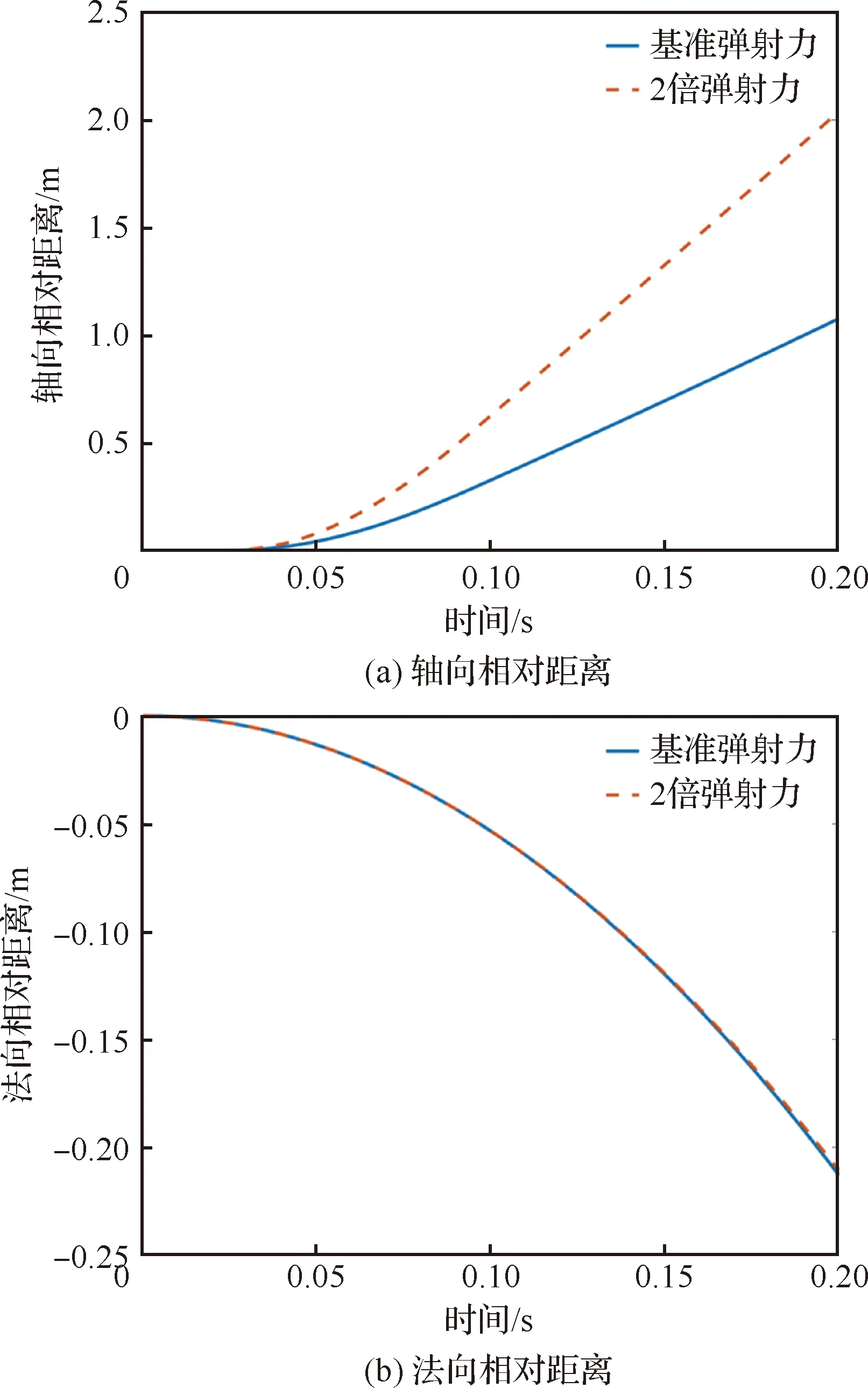
图13 不同弹射力情况下相对距离随分离时刻的变化Fig.13 Relative distances between aerocraft and assistor with different ejection forces
图14展示了在不同弹射力情况下,飞行器分离攻角随分离时间的变化。由图可知,在0.15 s分离时间内,弹射力对飞行器攻角基本无影响,而当分离时间超过0.15 s后,两倍弹射力作用下飞行器的攻角迅速增大。其原因在于0.15 s分离时刻,两倍弹射力作用下的飞行器与助推器质心轴向相对距离已达1.3 m,飞行器尾部底面基本脱离级间干扰区,并产生低压回流区,在尾部上下表面的压差作用下产生较大的抬头力矩,而基准弹射力作用下的飞行器尾部底面此时还未脱离干扰区,其上下表面压差变化不明显。

图14 不同弹射力情况下飞行器攻角随分离时刻的变化Fig.14 Variation of aerocraft angle of attack with separation time with different ejection forces
4 结 论
以类X-43A飞行器为研究对象,基于网格变形/局部网格重构的方法,对高超声速飞行器级间分离过程进行了仿真分析。为了验证仿真方法的正确性,选取WPFS投放试验作为验证算例,结果表明仿真和试验结果吻合较好。
对分离过程中典型流场分析表明,分离间隙的流动由缝隙流逐渐转化为通道流,且在分离初期存在显著的涡流区,随着级间连接前端脱离飞行器尾流区,在其前方形成完整的弓形激波,从而限制了尾流涡系的发展,整个分离过程受到涡流和激波双重干扰作用。
通过对攻角的影响分析可知:随着攻角由2°减小到-2°,法向相对距离迅速由0.08 m增大到0.34 m,而轴向相对距离基本无变化,因此对于类X-43A高超声速飞行器采用小攻角或者负攻角更有助于分离;另外,3种不同初始攻角下飞行器均呈现抬头趋势,且在负攻角情况下抬头更加明显。
对分离弹射力的比较分析可知,弹射力对于轴向相对距离有较大影响,0.2 s分离时刻,两倍弹射力较基准弹射力作用下产生的轴向相对距离大约1 m;在分离初始0.15 s内,弹射力对飞行器攻角基本无影响,而当分离时间大于0.15 s后,两倍弹射力作用下飞行器的攻角迅速增大,这缘于较大的分离弹射力使飞行器尾部底面更早地脱离级间干扰区,从而产生较大的抬头力矩。
猜你喜欢
航空学报(2022年9期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器知识(2021年11期)2021-11-27
科学与财富(2021年34期)2021-05-10
军事文摘(2020年8期)2020-08-12
兵器知识(2020年5期)2020-05-25
时代英语·高三(2019年4期)2019-09-03
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
