复合电源型无人机能量管理策略研究
2022-07-02 05:34:54李元旭乔培玉彭发醇
电源技术 2022年6期
李元旭,乔培玉,彭发醇
(四川航天系统工程研究所,四川成都 610100)
近年来,随着控制技术及电源技术的不断发展,多旋翼无人机受到了人们的极大关注。其应用场景从最初的军用逐步扩展到民用领域,如电力巡线、植保喷药、货物运输及高清航拍等。其中,复合电源型无人机以其同时具备较高比功率及比能量的优势备受瞩目,其有效解决了单一电源无人机巡航时间短及大电流运行影响电池寿命的问题。目前,应用较为广泛的是锂电池及超级电容器复合电源型无人机。超级电容器功率密度高、充放电速度快[1],可充分发挥其削峰填谷作用,补充锂电池功率,有效应对无人机爬升过程大功率需求及飞行中瞬时波动,保证复合电源稳定供电。
复合电源能量管理策略是对两种电源间功率做出合理分配[2],需既保障电源输出功率满足无人机不同飞行需求,又能使电源间能量互补以延长动力系统使用寿命。目前,应用于无人机能量管理的控制策略有逻辑门限值控制、功率跟随控制、基于优化的控制及模糊控制等[3-5]。逻辑门限值控制是指根据无人机的当前状态,对预先设计好的电源系统有限的工作状态通过逻辑门限进行控制和管理,其控制策略简单易实现,但没有考虑电源间功率分配问题,并且在电源切换时会有瞬时电流冲击[6]。功率跟随控制是指根据电源的运行状态及负载需求功率分配各电源功率,使其输出之和等于负载功率,其控制策略考虑了功率供需双方实时状态,并且覆盖了双电源所有可能的输出组合,但对每种情况均需进行严格分类及条件判断,且过多依赖主电源,不能很好地发挥辅助电源作用[7]。基于优化的控制是指先获取负载运行全过程的数据,再根据数据求出功率分配最优解,其控制策略考虑全面,但在实际工程中应用难度较高[8]。模糊控制是指按照提前设计好的模糊规则,以类似人的思维方式进行模糊推理,从而实现智能控制。文献[9]以燃料电池-锂电池为无人机复合电源,采用基于锂电池荷电状态的模糊控制,但没有考虑燃料电池实时状态,不能综合考虑电源功率安排;文献[7]提出了以两电源荷电状态及无人机需求为输入的模糊控制,但其模糊规则的制定对超级电容器的应用不够充分,使得其在负载高需求下放电过少,低需求下充电过少。
基于此,本文研究了无人机复合电源系统结构,介绍了针对所提系统的能量管理策略,提出了加深超级电容器利用程度的模糊控制,考虑双电源各自荷电状态,根据需求功率进行电源间功率初步分配,同时考虑无人机飞行过程中瞬时小幅波动的平抑,将实时检测出的波动功率分给超级电容器承担,完成功率二次分配,通过仿真与功率跟随控制策略进行比较,验证了所提方法可有效减小锂电池工作电流,平稳锂电池功率输出。
1 复合电源系统结构
锂电池属于能量型储能装置,难以满足无人机负载瞬时启动、重载、大风等突发情况下的大功率或波动性功率需求。因此,配置较小容量的功率型储能装置超级电容器作为辅助电源,对锂电池进行功率补充[10]。由于锂电池容量充足,荷电状态变化幅度小,可在超级电容器荷电状态低时对其充电,使其稳定在良好状态,为下次大功率补充提供充裕空间。
基于以上考虑,锂电池通过单向DC/DC 变换器与直流母线相连,将负载侧与电池侧稳定连接,电池作主电源;超级电容器通过双向DC/DC 变换器与直流母线连接,既能稳定直流母线电压,控制超级电容器充放电过程,同时,可通过DC/DC变换器由锂电池充电。系统结构图如图1 所示。

图1 复合电源系统结构图
按照无人机飞行需求将其工作状态划分为:起飞、巡航、爬升、重载、轻载。其中,需求功率在上升至较高值时会有瞬时冲击,飞行过程中如遇大风或躲避障碍物等突发情况,需求功率会有一定波动。
2 能量管理策略设计
针对复合电源系统的能量管理策略分为两步,如图2 所示,SOCli、SOCsc分别是锂电池、超级电容器荷电状态,Pneed是无人机需求功率,Pli_f、Psc_ f分别是锂电池、超级电容器初次分配功率,分别是锂电池、超级电容器最终分配功率,ΔP是波动功率。第一步是模糊控制,以充分发挥超级电容器对锂电池的功率补充作用;第二步是波动修正,以减小波动功率对锂电池稳定输出的影响。两电源最终分配所得的功率满足无人机需求功率,表示为:

2.1 模糊控制
模糊控制利用人类思维的模糊性编写模糊规则,进行模糊决策,克服了系统模型不易确定的困难[8]。针对无人机飞行过程爬升降落等各种情况,模糊控制可智能地控制两电源合理的功率分配完成能量管理。如图2 所示,模糊控制的控制结构以锂电池荷电状态、超级电容器荷电状态及无人机需求功率为输入,为突出模糊规则制定中辅助电源的功率补充作用,以超级电容器初次分配功率为输出。
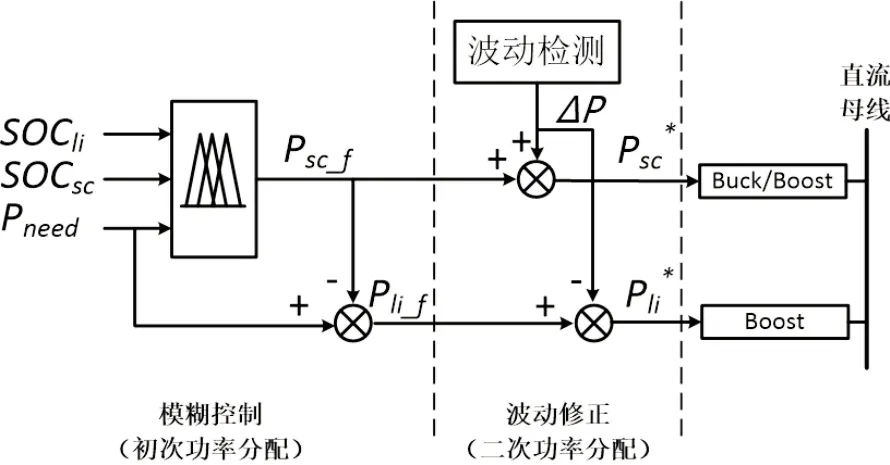
图2 复合电源能量管理策略
2.1.1 隶属度函数的定义
由于高斯函数具有优越的过渡性及分布性,模糊隶属度函数选用高斯函数,如图3 所示。定义SOCli、SOCsc基本论域分别为[0.2,1]、[0,1],模糊集均划分为{S、M、B},分别代表小、中、大。定义Pneed基本论域为[0,2 000],模糊集划分为{VS、S、M、B、VB},分别代表极小、小、中、大、极大。定义Psc_ f基本论域为[-500,1 000],模糊集划分为{NS、ZO、S、M、B},分别代表负小、零、小、中、大。

图3 模糊控制输入输出隶属度函数
2.1.2 模糊规则的制定
考虑到两电源各自充放电特性以及功率需求,模糊规则制定应服从以下条件:
(1)锂电池作为主要能量来源,在工作过程中一直处于供电状态;
(2)无人机为巡航状态时,锂电池荷电状态良好的状况下,可由锂电池单独供电,若锂电池放电不足,则可由超级电容器补充供电;
(3)在无人机爬升或重载状态下,为减小锂电池大电流输出对电池安全性的影响,锂电池以较高功率输出,超级电容器凭借其可大功率输出的特性全力配合输出,若超级电容器荷电状态相比锂电池占优势,可主力供电;
(4)在无人机轻载状态下,锂电池可保持巡航状态下功率输出,多出的功率为超级电容器充电,使超级电容器荷电状态尽量维持在高水平。
SOCli模糊集为{S、M、B}时,Psc_ f的模糊控制规则如表1~3 所示。
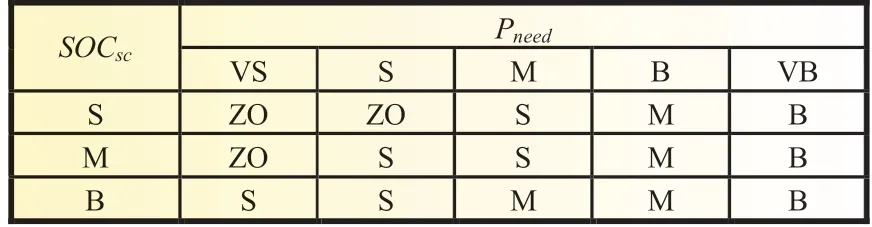
表1 SOCli 的模糊集为S 时Psc_f 的模糊控制规则
2.2 波动修正
由于无人机在飞行状态由低功率切换至高功率时难免会有一些小幅功率超调,或是在飞行过程中遇到阻碍致使功率发生瞬时波动。因此,设置二次功率分配,即波动修正。波动修正是对模糊控制分配后的功率再次调整,利用超级电容器充放电速度快、比功率大的特性,使其平抑上述超调及波动,有利于锂电池输出功率及放电电流的平稳输出,进而延长锂电池的使用寿命。

表2 SOCli 的模糊集为M 时Psc_f 的模糊控制规则
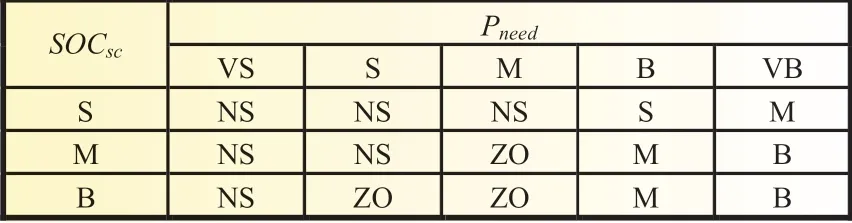
表3 SOCli 的模糊集为B 时Psc_f 的模糊控制规则
无人机运行中产生的功率波动一般具有短时、小幅的特点。根据上述特点,设置波动检测条件如下:
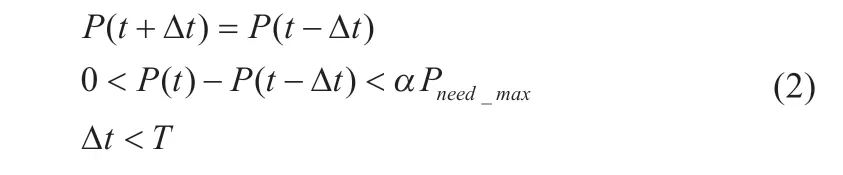
式中:P(t)、P(t-Δt)、P(t+Δt)是实时检测过程中随时间变化的功率值;Pneed_max是无人机需求功率最大值;α 是定义的波动幅值系数;T是定义的波动间隔。
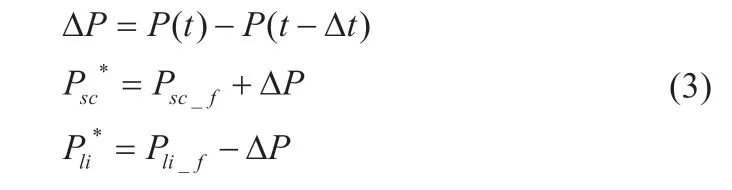
如图2 所示,波动修正将检测出的波动功率由超级电容器承担,模糊控制分配所得的锂电池功率减去这部分波动功率,以此完成二次功率分配,表示如下:
3 仿真分析
本文使用Matlab/Simulink 仿真软件对所提能量管理策略进行仿真分析。仿真参数如表4 所示。
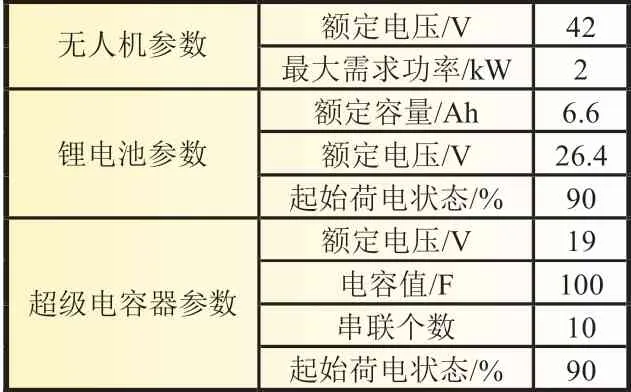
表4 仿真参数
仿真时长设定为30 s,采样时间为2.5×10-5,α 取0.1,T取0.15 s。根据无人机飞行状态,理想化功率需求如下:巡航功率为600 W,重载功率为900、1 200 及1 700 W,轻载功率为150、300 及450 W,起飞及爬升状态下有瞬时冲击,飞行过程中有小幅波动。无人机需求功率如图4 所示。
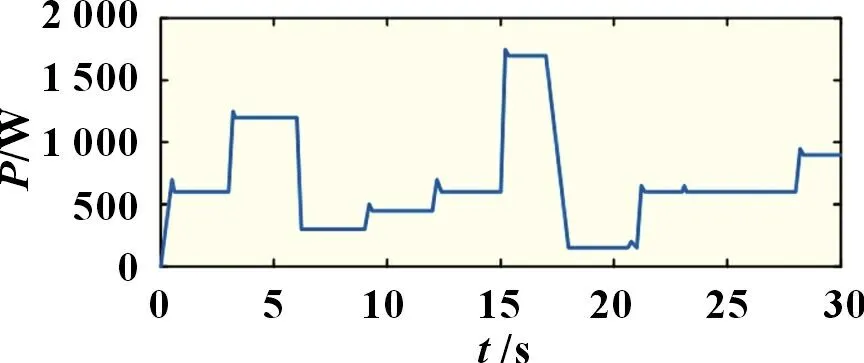
图4 无人机需求功率
为突出本文所提能量管理策略的优越性,选用功率跟随控制策略与其对比仿真。功率跟随控制具体方案为:设置锂电池额定输出功率为600 W,最大输出功率为900 W。若无人机需求功率大于等于最大输出功率时,锂电池仅输出900 W,超级电容器承担剩余负载需求;若无人机需求功率介于额定输出功率与最大输出功率之间,由锂电池单独供电给负载;若无人机需求功率小于额定输出功率,且当超级电容器荷电状态低于0.85 时,锂电池同时供电给负载和超级电容器,当超级电容器荷电状态高于0.85 时,仅由锂电池供电给负载。仿真结果如图5~9 所示。
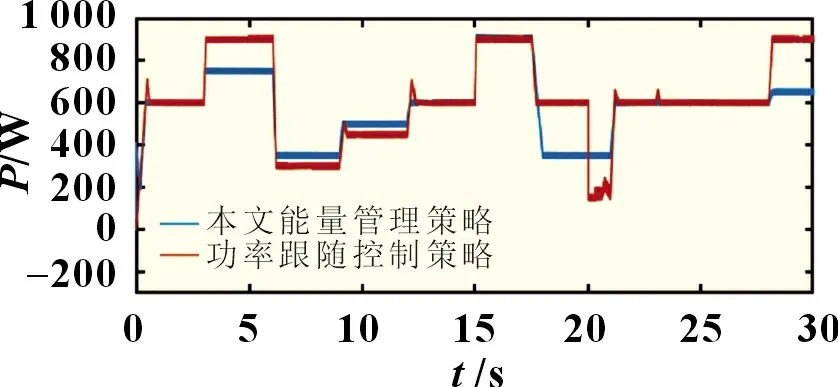
图5 锂电池输出功率对比
由图5 可知,相比于功率跟随控制策略,本文策略下锂电池输出功率基本稳定在巡航功率600 W 上下,在无人机重载状态需求功率不是很高时,输出较小,并且锂电池输出功率减小了波动功率的存在,有利于锂电池输出电流的稳定。
由图6 可知,相比于功率跟随控制策略,本文策略下超级电容器输出功率在无人机重载状态下有效补充锂电池功率为负载供电,在轻载状态下及时充电保证其放电能力的恢复,并且有效吸纳了需求功率中的波动部分,充分利用了超级电容器比功率性储能特性。
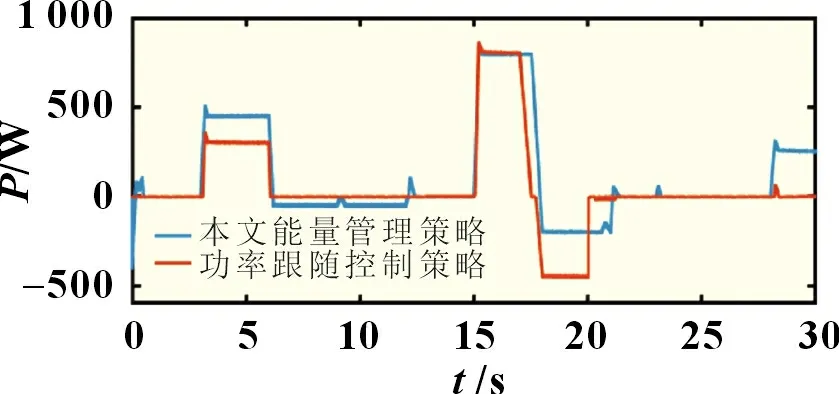
图6 超级电容器输出功率对比
由图7 可知,本文能量管理策略下,由于在无人机重载状态时限制了锂电池的功率输出,使得其荷电状态相比于功率跟随控制策略下降较少。

图7 锂电池荷电状态对比
由图8 可知,本文能量管理策略下,超级电容器由于在无人机重载过程中输出较多功率,导致荷电状态下降较多,但在轻载状态下能够及时补充能量,尽量维持在良好状态。
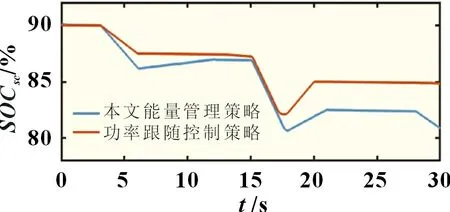
图8 超级电容器荷电状态对比
由图9 可知,锂电池输出电流变化趋势与其输出功率一致,相比于功率跟随控制策略,本文策略下锂电池输出电流更为平稳,有利于延长电池使用寿命。
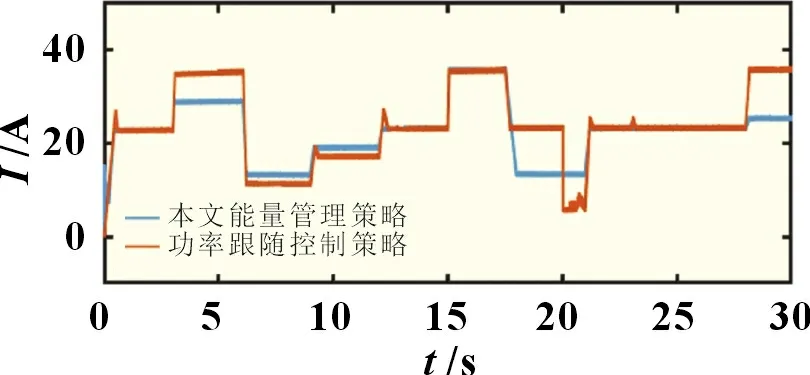
图9 锂电池输出电流对比
4 结论
针对无人机供电问题,本文研究了复合电源的能量管理策略,选用锂电池-超级电容器作为电源,设计了基于加强超级电容器供电作用的模糊控制及针对波动平抑的功率修正方案,使得超级电容器在无人机重载状态下作为辅助电源尽力为负载供电,在无人机飞行遇到瞬时功率变化时及时消纳波动功率,充分发挥其削峰填谷的作用,有利于复合电源平稳供电。仿真结果表明本文所提策略有效可用。
猜你喜欢
测控技术(2018年11期)2018-12-07 05:49:38
电源技术(2017年1期)2017-03-20 13:37:58
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
电测与仪表(2014年24期)2014-04-09 11:35:56
燕山大学学报(2014年2期)2014-03-11 15:28:26