巡检机器人安全应急红外线光谱自探测处置系统研究
2022-07-02 10:11李杭王战
消防界 2022年11期
关键词:应急处置
李杭 王战
摘要:笔者通过实地考察浙江能源嘉华电厂,阅读分析了大量国内外相关案例后,研究开发了一套巡检机器人安全应急红外线光谱自探测处置系统,该系统可以实现全天候实时巡检,接收红外、紫外线光谱,能自动探测明火,自动报警并完成应急处置装置响应动作,在事故初期就作出应急处置。相较于市面上已有机器人更加智能化。
关键词:巡检机器人;光谱自探测;智能感知;应急处置
一、研究背景和意义
(一)研究背景
电力能源与国家经济的快速发展、社会生产的稳定运行息息相关,这对能源行业生产作业的安全性、可靠性提出了更高的要求。电厂是能源产业非常重要的组成部分,电厂设备的稳定、安全运行是实现安全生产的重要保障,因此电厂设备的运维巡检是非常重要的工作。
目前,电厂设备安全巡检作业方式主要包括:人工巡检和机器人巡检。人工巡检是工作人员携带检测设备对高压设备和电力输电线进行监视。由于电厂电力设备或输电线路所处地理位置十分复杂,增加了人工巡检的难度,人工巡检方法不但劳动强度大、效率低、检测精度低、可靠性差、成本高,而且对许多高压设备或输电线路存在的安全隐患不易发现。随着移动机器人技术与自动化技术的发展,将机器人技术与电力应用相结合,为电网的维护提供了新的巡检方式,即机器人巡检代替人工巡检,极大地提高了工作效率。经过调查研究发现,目前市面上的巡检机器人仍存在一些不足,当紧急情况发生时,机器人只能够实现异常报警,不能够在事故发生初期就进行应急处置,若异常位置较远且过于隐蔽,等应急人员到达现场,已经错过了最佳应急时机,事故仍会造成巨大损失。因此,研究开发一套巡检机器人安全应急红外线光谱自探测处置系统势在必行,可以弥补现有巡检机器人的不足,更智能、更全面地实现电厂电力设备的无人化巡检需求。
(二)研究意义
伴随着经济发展和人民生活水平的提高,社会用电量不断提升,对电网运行稳定性提出了更高挑战,变电、输电、配电等电力系统各环节的巡检需求进一步提高。目前大多数电力公司仍主要采用传统的人工巡检方式,即利用看、听、闻等感知手段,对电力设备运行状态进行查验和记录,此种方式存在着人力成本高、巡检手段单一、巡检数据主观性强、受天气影响大、数据管理分散等问题,逐渐无法满足准确、实时、高频率的电力设备巡检需求。在电力公司日常运行发电工程中,如果巡检不彻底、不及时,电力设备的高负荷运行,容易引发配电室火灾,极大的威胁了电力公司的安全生产和人员安全。因此,有部分电厂已经采用机器人巡检代替人工,使人力、物力投入大幅度减少,有效防止了电气过载和现场跑冒滴漏等问题引发的事故。
经过调查发现,市面上的巡检机器人只是单一地代替人工,并不能在异常情况发生时就迅速作出应急响应。若緊急情况发生,等待应急人员到达现场,事故往往已经难以控制,仍然会造成巨大损失。所以,笔者开发设计了一套巡检机器人安全应急红外线光谱自探测处置系统。该系统不仅实现了目前市面上所存在巡检机器人的日常巡检功能,还具有应急处置功能。当发现异常情况,例如设备温度过高、电气过载、现场跑漏等,可在第一时间作出应急措施,极大地减少事故发生概率,降低电厂损失,本系统也具有很好的市场前景和实际意义。
(三)国内外研究现状
电厂巡检机器人主要应用于高压配电室,对配电室设备进行非接触式带电监视与巡检,将机器人技术、行为规划技术、巡检技术等相结合,代替或辅助人工完成变电站设备巡检作业。机器人通信联动技术使得机器人在巡检过程中发现异样即可联动应急处置装置。
电厂巡检机器人研究工作始于20世纪80年代,日本、加拿大等发达国家先后开展了电厂配电室巡检机器人的研究工作。到了90年代,国内一些科研机构和电力公司陆续开展了电厂巡检机器人的研究工作,并研发了一种基于双轨道式变电站巡检机器人BIG MOUSE,该巡检机器人适用于500kV变电站,其检测系统配置云台、辅助照明,以及可见光摄像机、红外热像仪等信息采集设备,可自主获取变电站设备信息,但是由于一些关键技术等问题,仅在少数电厂进行了试用,并停止了后续的研发。随后随着科技的进步,电厂巡检机器人得到了快速的发展。
目前,市面上的巡检机器人都只是代替了人工进行单一的巡检,是一种基于自主导航与定位、自主充电的全天候室外移动平台,携带可见光摄像仪、红外热像仪、拾音器等多种检测设备,以非接触方式采集变电站设备信息,通过图像处理、模式识别等技术实现对设备过热、外观异常、开关分合状态的识别,可完成配电室仪表、油位计指针位置读数的识别。发现异常,只能实现报警和数据上报,不能实现应急处置,会错失防止事故发生的最佳时机。综上所述,电厂巡检机器人仍存在很大的发展空间,现研究开发一套巡检机器人安全应急光谱自探测处置系统,该系统不但具备传统机器人的巡检功能,还集成了红外光谱自探测处置装置,可对异常设备进行实时处理,极大地减少事故发生的概率。
二、系统概述
(一)功能简述
巡检机器人安全应急红外线光谱自探测应急处置系统面向各大发电厂配电室、泵房等场所的安检工作需求。主要功能有:
(1)实时进行红外线接收。
(2)自动探测明火火焰、高温区域。
(3)异常自动报警。
(4)应急处置装置自动旋转定位。
(5)自动对准开阀门喷射。
(6)自动闭阀复位,远程控制等。
(二)相比于普通巡检机器人系统的优势
1.普通巡检机器人系统
现有的巡检机器人系统模式单一,只是简单的代替人工进行日常巡检,在事故发生初期,机器人发出报警,不能够进行应急处置。若异常区域较远、区域隐蔽,或人员不好进入,则不能在第一时间进行处置,错过最佳的救援时机,造成财产损失,甚至人员伤亡。所以仍具有一定的局限性和优化空间。073338A2-ABD6-4819-8ACD-7AE2FED2902A
2.巡检机器人安全应急光谱自探测处置系统
巡检机器人安全应急光谱自探测处置系统不但具有普通巡检机器人的巡检功能,还集成了一套光谱自探测应急处置装置,具有自动控制功能,当机器人发出报警,应急处置装置立即动作,若设备温度过高,设备出现明火,应急处置装置可实现智能灭火,极大地降低了事故发生概率,减少财产损失和人员伤亡。相比较于普通巡检机器人更加智能、更加全面,具有更加广阔的应用前景。
(三)系统的通信系统简介和功能特点
1.网络通信系统
网络通信系统可以满足机器人安全应急红外线光谱自探测应急处置系统关键设备实时、高效、安全以及应用的数据通信需求:机器人安全应急红外线光谱自探测应急处置系统能够实时接收来自第三方机器人管控平台的控制指令,包括远程控制机器人的启动与停止,控制光学传感器、红外传感器等,也能够实时接收来自云端机器人操作系统的自动更新。机器人安全应急红外线光谱自探测应急处置系统能够实时向第三方机器人管控平台发送数据,光谱传感系统可以向巡检机器人安全应急红外线光谱自探测应急处置系统和第三方机器人管控平台发送传感知信息数据,反馈现场的动作状态。
2.机器人平台应急装置的功能特点
(1)自动控制功能:应急装置具有完成全方位监控、探测火情、定位判定火源、启动系统、定位喷射、持续喷射、停止或重复启闭喷水等全过程的控制能力(当机器人平台处在半自动状态下,能自行预警定位,不喷射介质,需要总控确认命令进行喷射)。该装置由自行探测定位装置和介质容器以及软件系统组成,应急灭火过程不需依赖手工操作。整个系统从发现火灾、火灾确认、应急启动系统、应急喷射至停止喷射的全过程都是主动完成的。
(2)远程控制手动状态:通过机器人可见光AI视觉识别烟火预警或者热成像高温预警定位功能,在机器人终端软件应急处置窗口结合图像定位的热烟火区域,操作窗口可以对应急装置进行左右控制旋转、启动喷射、停止、视频监控等操作。
(3)遥控控制功能:通过应急预警装置专用遥控器可以对装置进行启动、停止、手动定位等操作。
(4)工作状态指示功能:电源指示、机械运行状态指示、通信数据发送、火情指示等。
(5)自定位功能:应急装置感应火源,启动转动机构寻找火源时,通过程序特殊处理,遇到火点后运算定位确定火源,使火点最终定位更加准确,可增加计算机图文管理系统,实现更直观地操作。
(6)智能感知:AI三检机器人安全应急红外线光谱自探测应急处置系统平台搭载多种光谱传感器设备对电厂现场火情数据进行采集、检测等。
(7)应急处置:当监控范围内发生火情时,该装置系统能迅速捕捉到火情信息并上传到系统平台,在短时间内准确定位并进行应急喷射,喷射后自动闭合阀门,不会造成大量污染,甚至火灾后的水渍灾害。如果火势复燃,该系统会重新启动,进行循环灭火。
3.光谱传感机械结构系统介绍
当光谱探测传感器接收到微小火苗中的红紫外线后,紧急预警传输到机械结构内置的控制处理中心,同时驱动设备的水平电机进行设备旋转,通过窄缝光谱分析定位法进行水平定位,同时在自动状态下自行启动自带阀门和微型高压仓,对准着火点的火苗进行介质噴射,喷射过程有左右5°的角度摇摆,以确保延缓火势的发展,同时发出声光警报等一系列的预警措施。
该应急救援灭火系统具备较高的智能性,它将计算机技术、红外、紫外传感技术、信号处理及判别技术、通信技术、机电控制自动化技术有机结合起来,具有全方位火焰光谱监控、探测火灾、定位火源、启动泡沫/干粉灭火系统、持续喷射、重复启闭等全过程的控制能力。同时,该装置由自行探测定位装置和介质容器以及软件系统组成,应急灭火过程不需依赖手工操作。整个系统从发现火灾、火灾确认、应急启动系统、应急喷射至停止喷射的全过程都是自动完成的。当监控范围内发生火情时,该装置系统能迅速捕捉到火灾信息上传到系统平台,在短时间内准确定位、应急喷射,灭火剂使用率高,喷射后自动闭合阀门,不会造成大量污染或水渍危害。如果发生复燃,该系统还会重新启动,循环灭火。此外,该系统还具有安装简单、工期短、外形美观等特点。
(四)系统综合管理
1.运行模式
系统应支持全自动和远程控制模式。全自动模式可实现自动运行、自动探测、自动定位、自动灭火、自动复位。远程控制模式是可通过后台机器人平台软件的控制窗口实现对应急装置的远程控制,包括:控制方向、远程喷射、复位等。
2.系统安全
系统架构应在网络分区、访问控制、安全审计、运维审计等方面进行统一规划设计,各个系统规划设计方案应体现网络安全防护内容,以便统一纳入公司互联网平台网络安全防护体系。
三、系统的硬件要求
(一)工作环境
在如下工作环境中机器人能正常工作:
工作环境温度:+1℃~+55℃;
相对湿度:≤92%。
(二)传感装置
传感装置至少包含以下类型:
1.红紫外线光谱传感器
AE-S708/4和AE-S708/5红外热释电传感器通过两个工作于不同波段的红外热释电传感器将火焰燃烧参数转换为电信号,之后将信号输入工业计算芯片进行比较、运算和处理,配合IrⅡdetecter@anysafe专用智能控制软件,可以及时发出信号,监视状态≤15mA,报警状态≤35m。采用传感器硬件补偿和智能软件补偿结合模式,可有效补偿因温度、环境变化和元器件长期工作产生的漂移,可有效抑制非火焰干扰源的影响,如阳光(直射和反射)、常用人工光源、背景辐射源、热移动物体、电焊等。电路部分主要包括传感器、低噪声放大器、工业处理单元、外围输出和驱动电路、电源和EMC电路等。
2.微型可见光摄像机
支持PC linux系统,可集成于嵌入式设备中。支持外触发闪光灯同步拍,一台电脑接多个相机可稳定工作,长时间下不掉线、不丢帧。SUA全系列支持U3VISION协议,可无缝支持HALCON、LabVIEW等视觉软件。
四、结语
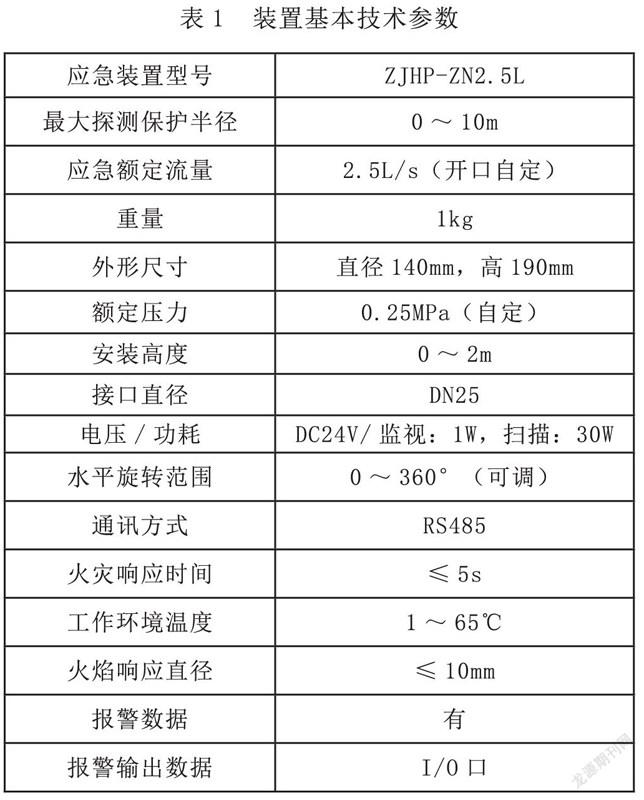
文章结合现有研究成果,详细叙述了巡检机器人安全应急红外线光谱自探测处置系统的主要功能和技术参数,充分展示了机器人集成应急处置装置的巨大优势,具有很好的应用前景。利用机器人在发电厂对电力设备进行巡检,是配电室巡检的一种技术手段,是智能电网发展的方向,也是特种机器人研究的新应用领域。因此,具备应急处置功能的巡检机器人必将迎来新的市场热潮。
本系统仍有继续优化的空间,比如系统硬件性能的再优化,应急处置系统的响应速度再提升,以及整个巡检机器人安全应急红外线光谱自探测处置系统集成程度的再提高,拥有更好性能的同时又具有更小的体积,以实现对更加恶劣、狭小环境实行巡检保护。总之,巡检机器人安全应急红外线光谱自探测处置系统具有很广阔的发展前景和应用价值。
参考文献:
[1]范维澄,刘乃安.中国火灾科学基础研究进展与展望[J].中国科学技术大学学报,2006,36(01):1-8.
[2]杜兰萍,沈友弟,厉剑,等.我国消防安全形势、差距和对策研究[J].消防科学与技术,2002(05):3-13.
[3]GB 50338-2003 固定消防炮灭火系统设计规范[S].中华人民共和国公安部,2003.
[4]GB 50016-2014(2018年版) 建筑设计防火规范[S].公安部天津消防研究所和公安部四川消防研究所会同有关单位,2018
[5]GB 50338-2003 固定消防炮灭火系统设计规范[S].中华人民共和国国家质量监督检验检疫总局,中华人民共和国建设部,2003.073338A2-ABD6-4819-8ACD-7AE2FED2902A
猜你喜欢
建材发展导向(2016年6期)2017-01-17
山东工业技术(2016年24期)2017-01-12
中国高新技术企业(2016年31期)2016-12-22
电脑知识与技术(2016年26期)2016-11-25
管理观察(2016年30期)2016-11-22
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年23期)2016-11-04
中国市场(2016年33期)2016-10-18
天津农业科学(2015年6期)2015-06-16