
崩解岩保护层精准开挖施工技术
2022-07-01 08:32洪后兵朱海亚
中国水能及电气化 2022年4期
洪后兵 朱海亚
(安徽省引江济淮集团有限公司,安徽合肥 230000)
1 工程概况
引江济淮工程从长江下游上段引水,向淮河中游地区补水,是一项以城乡供水和发展江淮航运为主,结合灌溉补水和改善巢湖及淮河水生态环境等综合利用的大型跨流域调水工程,自南向北可划分为引江济巢、江淮沟通、江水北送三大工程段落,共设八大节制枢纽。蜀山泵站工程为Ⅰ等大(1)型工程,设计流量340m3/s,其中设计引水流量290m3/s,设计净扬程12.7m,单机功率7500kW,单机流量43.0m3/s,共装机组8台套,总装机容量60000kW。是亚洲装机流量最大的混流泵站。
渠道总长2.57km,渠道底部多为崩解岩,局部崩解岩具有弱膨胀性,岩体卸荷膨胀、蒸发失水,贫水岩基遇水后崩解。本工程进水渠及泵站基础均为混凝土结构。
2 工艺原理
从减弱开挖机械设备对岩体造成微裂、疏松面等目的出发,引进用于道路养护翻修作业的铣刨机进行崩解岩基础保护层开挖,利用无人机倾斜摄影测量技术,对开挖面不同的角度进行数据采集,经分析后,将导出数据实时传输给铣刨机操作手,为精准、高效控制崩解岩保护层开挖提供参考,解决了崩解岩区域基础预留保护层开挖施工效率低下,不平整度、超欠挖不易控制等问题。
3 施工流程及操作要点
3.1 施工准备
对涉及保护层开挖区域施工通道进行规划,即:在开挖区域边缘留设一进一出环向施工通道,便于铣刨机及土石方装运设备通行;用白灰撒设5.0m×5.0m方格网,为铣刨机运行提供指引,防止出现漏铣情况。
无人机相机选型是精准获取影像的基础。本文中选用的大疆精灵4PRO+2.0型无人机,其前、后、左、右及下方垂直角度搭载的5镜头相机倾角统一设置为45°,并且保证侧视相机焦距为下视相机焦距的1.4倍。正式运行前,对相机安装倾角、视场角等进行模拟测试,以降低飞行期间故障率。
3.2 无人机航线布置
影像的重叠度是衡量无人机航线布置精准度的关键所在,倾斜摄影的模型精度一般是照片分辨率的3倍,它以多角度同步提取影像,可以弥补一般照片生成的正射影像的不足。本文中选用的无人机为旋翼机型,飞行速度越快,机身倾斜角也就越大,而倾斜角增大会影响成像的重叠度。在保护层精准开挖施工中飞行速度越慢,模型精度越高、细节效果越好。倾斜摄影的航线采用DJI GS Pro地面站专业版(iPad)进行设计,地面分辨率及物理像元尺寸与相对飞航高度满足一定比例关系。航线设计采取旁向重叠度60%,航向重叠度90%。实际飞行中,各个相机根据提前提供的坐标点自动进行曝光拍摄。本文经过实践确定的飞行高度为40m,飞行速度为5m/s(见图1、图2)。
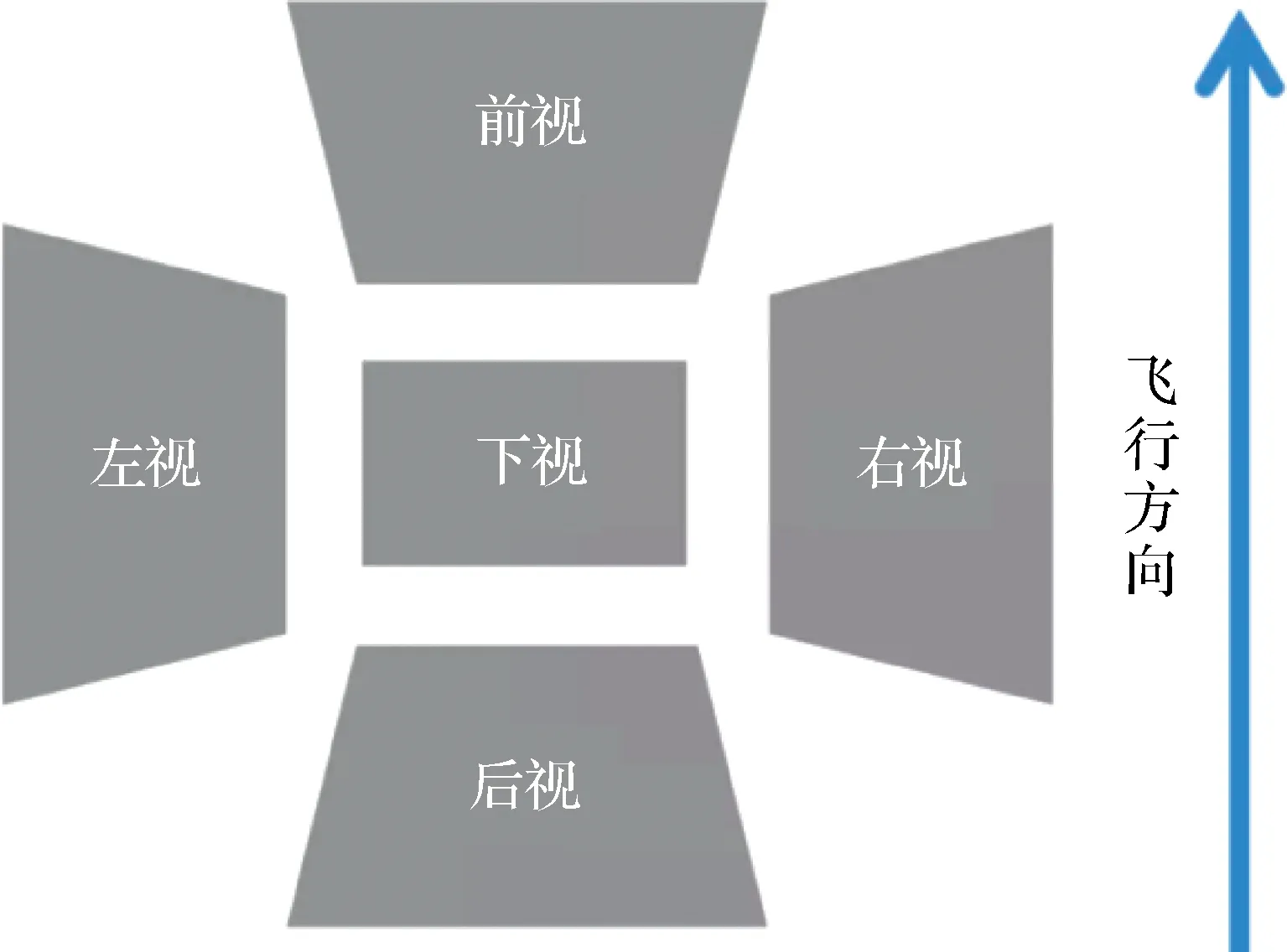
图1 无人机相机倾角设置示意图

图2 无人机航带设计
3.3 地形影像采集
利用实景三维获取系统,采用“低空航空摄影”的方式获取开挖河渠的原地形像片,输入地面像控测量数据,通过处理软件进行空三加密,得到每张影像数据(见图3)。
为了满足模型精度要求,在测区四周及内部布设并采集多个控制点的坐标,形成控制网。将全部航测数据都纳入到了同一个坐标系统当中。这样做既能提高测量精度,又能方便数据对比。摄影测量分别生成数字正射影像(DOM)、数字高程模型(DEM)、数字表面模型(DSM)等成果。
3.4 影像数据分析处理
外业摄影作业完成后,需要及时将数据导出转入内业处理,使用Pix4Dmapper处理软件生成三维模型及派生数据,包括DOM、DSM(含DEM)、数字点云等数据。
3.4.1 数据检查
主要检查航线弯曲度,像片倾角、旋角,实际影像重叠度,摄取河渠范围、影像的清晰度、像点位移等。如果检查内容不满足数据处理要求,需要重飞或补飞。
3.4.2 空三加密
采用光束法区域网联合平差的方法,其基本原理是对运用两种不同观测手段得到的数据进行平差,对像片的POS姿态数据与控制点坐标初始数据进行联合平差。基于原始影像及空三成果,建立三维模型,进行高程数据标识。
3.5 实时数据传输
利用手机与平板电脑建立局域网络,保证数据传输专线专用。建立涵盖技术、质量、测量、施工、操作手在内的微信群,采集、分析出的数据通过三维图形的方式实时更新、上传。
3.6 铣刨作业
铣刨机和自卸车准备好,调整好位置。启动铣刨机,由技术人员指导操作手根据分析整理的测量成果调整好铣刨深度。铣刨过程中,前方由施工员指挥,保证全程出料与自卸车配合良好。对于没有输送到自卸汽车上的铣刨料,统一堆存至路面,及时进行人工清理(见图4)。

图4 铣刨机铣刨
3.7 效果检查
在开挖完成后,采用全站仪对开挖面进行全面检测,监测点采用横断面控制,断面间距不大于5m,各断面点数间距不大于2m。对于崩解岩区域预留保护层开挖共计检测4650点(见图5)。经检测:坡面无欠挖,平均超挖2.3cm,远远小于规范允许的15cm。根据《水利水电工程单元工程施工质量验收评定标准——土石方工程》(SL 631—2012),崩解岩区域保护层开挖各主控项目检验点全部合格,且全部单元达到优良标准(见图6)。

图5 铣刨效果

图6 效果检查
4 质量控制措施
正式施工前,根据设计施工图纸对开挖区控制点坐标进行复核测量。利用GPS RTK在河渠测量若干个特征点,记录坐标、椭球高及需要拍摄的每个点对应的河渠部分位置,检测河渠实景三维模型的精度,确保模型精度。
由于倾斜摄影采取多视匹配的算法进行空三加密处理,在航设过程中严格按照既定航线、点位进行操作。依据机载POS数据检查下视相机的倾斜角度,在摄影期间飞机开启畸变校正模式,以保证相机轴与铅直方向的夹角为0°。
摄区航线弯曲度可依照框幅式数字航空摄影规范值,因此在航高保持方面要求同一航线上相邻相片的航高差不大于30m,最大航高与最小航高之差不大于50m,分区内实际航高与设计航高之差不大于50m。
为保证摄区外侧也能获取影像,摄区边界覆盖较垂直摄影大。实际航摄过程中,在航线旁向和航向方向测区边界范围外增加一个航高以上距离的外扩。
5 结 语
本文研究将“无人机倾斜摄影测量+铣刨机”技术用于水利工程崩解岩基础保护层开挖施工中,采用了大疆精灵4PRO+2.0型无人机,在飞机前、后、左、右及下方垂直角度搭载5台传感器,分别对航向重叠度、坐标值、旁向重叠值、航速及航高、飞行航向等数据进行采集,基于CNSS和地理信息技术等合理结合,提高了数据分析的精确度。数据分析后,将导出数据实时传输给铣刨机操作手,以便其动态调整铣刨深度。铣刨机的一次铣刨宽度为1.5m,开挖面超挖可有效控制在3~5cm。成功解决了崩解岩地区保护层超欠挖控制难度大的问题,对类似工程施工具有借鉴意义。
猜你喜欢
煤炭工程(2022年9期)2022-09-23
采矿与岩层控制工程学报(2022年2期)2022-03-24
建材发展导向(2021年13期)2021-07-28
小哥白尼(神奇星球)(2021年12期)2021-03-08
建材发展导向(2019年11期)2019-08-24
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11
解放军生活(2009年10期)2009-11-16
